

FPGA排序-冒泡排序介绍
可编程逻辑
1397人已加入
描述
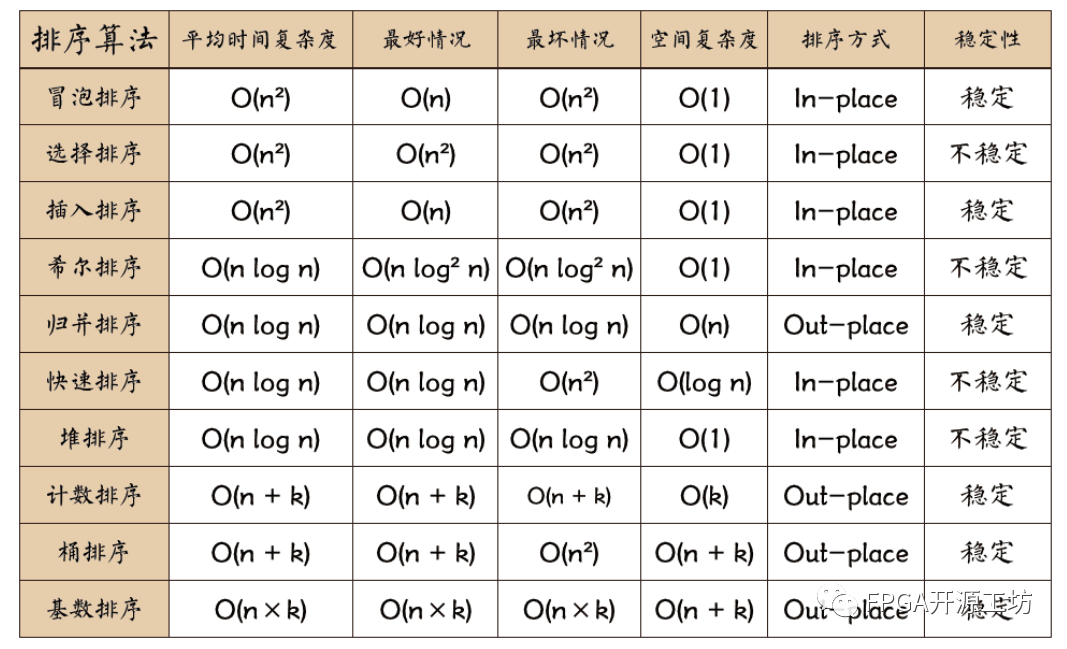
排序算法是图像处理中经常使用一种算法,常见的排序算法有插入排序、希尔排序、选择排序、冒泡排序、归并排序、快速排序、堆排序、基数排序。
如下图:
冒泡排序的排序过程如下:
整个排序的过程就是两两比较,然后做交换。整个过程的时间复杂度n的平方,也就是说需要交换很多次,如果把这么多交换过程都在一个时钟周期内完成的话,组合逻辑会很长,这样直接影响最后的时序。如果每个时钟周期进行一次交换的话,pipeline是会很长的。
那么我们可以通过变通一下,整个排序过程只做比较,而不做交换。每一次比较的结果都记录下来,然后设置一个计分板,通过计分板就可以知道排序的结果了。
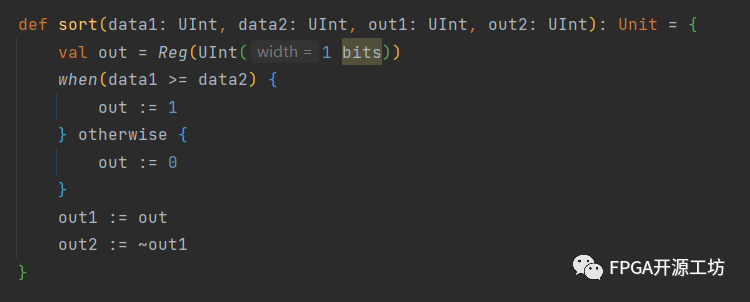
首先是比较的过程:判断输入的两个数哪个大,使用1bit变量来记录比较结果。
然后是计分板的生成:

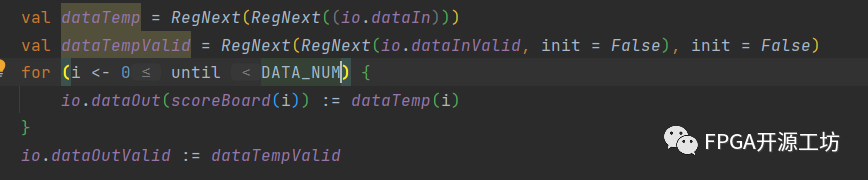
最后是排序结果的输出:
仿真代码如下:
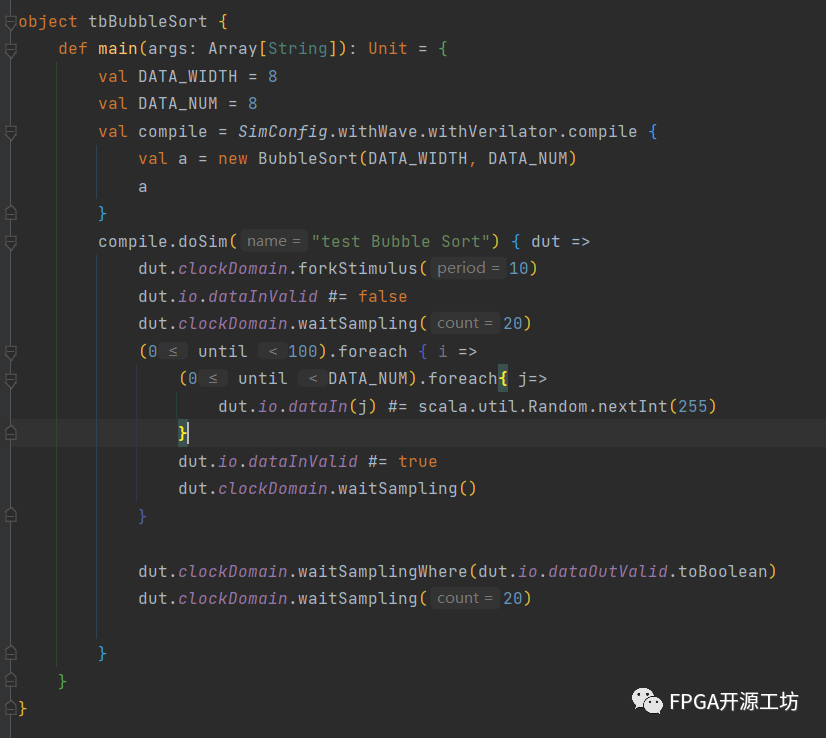
仿真波形:
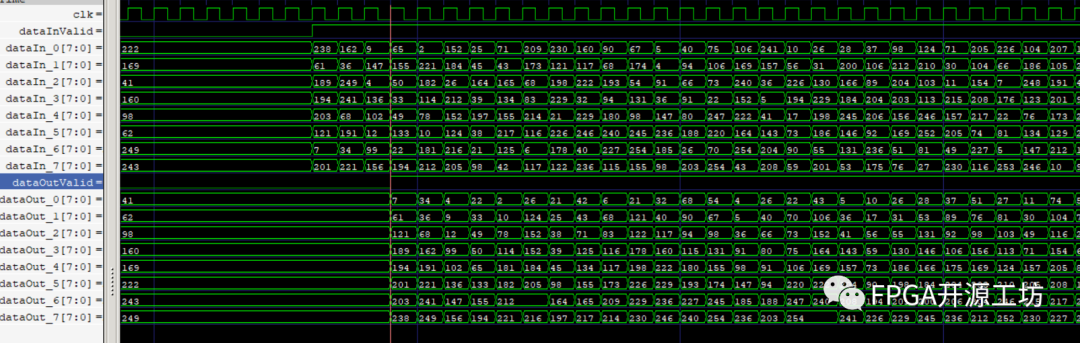
一共三级流水,占用的资源也不多,可以自己通过reduceBalancedTree来增加更多的流水。

照例提供SpinalHDL的源码,Verilog有需要的私聊:
import spinal.core._
import spinal.lib._
class BubbleSort(DATA_WIDTH: Int, DATA_NUM: Int) extends Component {
val io = new Bundle {
val dataIn = in Vec(UInt(DATA_WIDTH bits), DATA_NUM)
val dataInValid = in Bool()
val dataOut = out Vec(Reg(UInt(DATA_WIDTH bits)), DATA_NUM)
val dataOutValid = out(Reg(Bool()) init False)
}
noIoPrefix()
val sortV = Vec(Vec(UInt(1 bits), DATA_NUM - 1), DATA_NUM)
for (i <- 0 until DATA_NUM) {
for (j <- (i + 1) until DATA_NUM) {
sort(io.dataIn(i), io.dataIn(j), sortV(i)(j - 1), sortV(j)(i))
}
}
val scoreBoard = Vec(Reg(UInt(log2Up(DATA_NUM - 1) bits)), DATA_NUM)
for (i <- 0 until DATA_NUM) {
scoreBoard(i) := sortV(i).reduceBalancedTree(_ +^ _).resized
}
def sort(data1: UInt, data2: UInt, out1: UInt, out2: UInt): Unit = {
val out = Reg(UInt(1 bits))
when(data1 >= data2) {
out := 1
} otherwise {
out := 0
}
out1 := out
out2 := ~out1
}
val dataTemp = RegNext(RegNext((io.dataIn)))
val dataTempValid = RegNext(RegNext(io.dataInValid, init = False), init = False)
for (i <- 0 until DATA_NUM) {
io.dataOut(scoreBoard(i)) := dataTemp(i)
}
io.dataOutValid := dataTempValid
}
object BubbleSort extends App {
SpinalConfig(inlineConditionalExpression = true,anonymSignalPrefix="temp").generateVerilog(new BubbleSort(8, 8))
}
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
FPGA排序-冒泡排序(Verilog版)介绍2023-10-07 4384
-
jwt冒泡排序的原理2023-09-25 1383
-
怎样运用Java实现冒泡排序和Arrays排序出来2023-03-02 1154
-
php版冒泡排序是如何实现的?2023-01-20 2182
-
C语言冒泡排序工程代码汇总2021-08-30 1016
-
冒泡排序法的具体实现方法是什么?2021-07-15 1302
-
揭秘冒泡排序、交换排序和插入排序2021-06-18 3149
-
Java冒泡排序的原理是什么?2020-11-06 5582
-
冒泡排序法三部曲の一、冒泡排序原理版2019-09-12 3760
-
冒泡排序代码和应用程序免费下载2018-12-06 823
-
一文了解冒泡排序2018-01-17 3753
-
冒泡排序2015-10-17 2704
-
labview 版的冒泡法排序2012-06-05 14104
全部0条评论

快来发表一下你的评论吧 !
