

KUKA机器人的初始化运行
描述
KUKA 机器人的初始化运行称为 BCO 运行。
BCO 是 B lock coincidence (即程序段重合)的缩写。重合意为 “ 一致 ” 及 “ 时间 / 空间事件的会合 ”。
在下列情况下要进行 BCO 运行:
选择程序 (例 1)
程序复位: 复位 (例 1)
程序执行时手动移动 (例 1)
更改程序 (例 2)
语句行选择 (例 3)
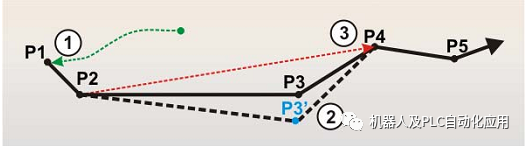
BCO 运行执行举例
1 选定程序或程序复位后 BCO 运行至原始位置
2 更改了运动指令后执行 BCO 运行 删除、示教了点后
3 进行了语句行选择后执行 BCO 运行
BCO 运行的原因 :
为了使当前的机器人位置与机器人程序中的当前点位置保持一致,必须执行 BCO 运行。
仅当当前的机器人位置与编程设定的位置相同时才可进行轨迹规划。因此,首先必须将 TCP 置于轨迹上。
在选择或者复位程序后 BCO 运行至 Home 位置
相关系统变量
$ON_PATH 在轨迹上
用于监视编程路径的信号声明
BCO运行后设置此输出。因此,机器人控制器会与上级控制器通信,使机器人位于编程路径上,只有当机器人离开路径,程序被复位或执行块选择时,输出才再次复位。
VW标准设置 :SIGNAL $ON_PATH $OUT[4040]
$MOVE_BCO
指示当前是否正在执行BCO运行
$MOVE_BCO=State
true:正在进行BCO运行。
false:不进行BCO运行。
责任编辑:彭菁
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
labview运行后如何初始化2023-12-28 4822
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3886
-
KUKA C4机器人报:KSS13012<{总线识别号}>ECat Stack初始化时出错2022-03-17 9751
-
KUKA机器人伺服驱动模块维修2021-09-17 1877
-
库卡机器人MGV电源模块维修2021-09-08 1875
-
工业机器人组成结构相关资料分享2021-07-05 2735
-
KUKA机器人的初始化运行称为BCO运行2020-10-30 7042
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8014
-
KUKA机器人的初始化运行原因2020-09-08 5924
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12392
-
KUKA机器人问题解答2019-07-15 2621
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4422
-
求KUKA机器人控制柜三维模型2016-04-18 6458
-
KUKA重型机器人2015-02-03 8315
全部0条评论

快来发表一下你的评论吧 !
