

对于三维视觉,C++为何如此重要?
描述
目前的三维视觉算法基本上都是用C++语言编写的,比如SLAM算法。既然这些算法都是C++编写的,必然有其自身原因。主要是因为,SLAM系统是一个实时性要求很强的系统,运行速度与精度都很重要。Python也有加速手段,但总体上C++比较接近底层,在执行效率和资源占用上要好很多。而且很多语言都是在C++或者C语言的基础上进行封装的。
C++一直都被称作是最难学的计算机语言,笔者从业多年,也认为确实如此。相比于其他几种语言,单纯从语法结构来说,C++都是比较困难的。何况很多同学并不是计算机专业出身,基础不是很扎实。SLAM算法都会集成了C++中的很多模块,还有大量的第三方库,对于初学者而言,想读懂这些算法源码肯定更是难上加难。然而,这些源码并不是无迹可寻,许多算法的编写都有比较固定的套路。
下图是某个SLAM算法中的部分源码。
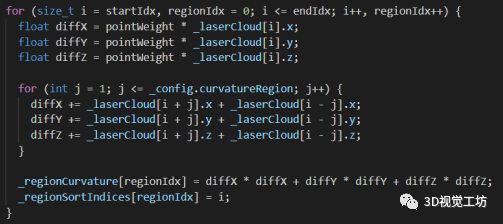
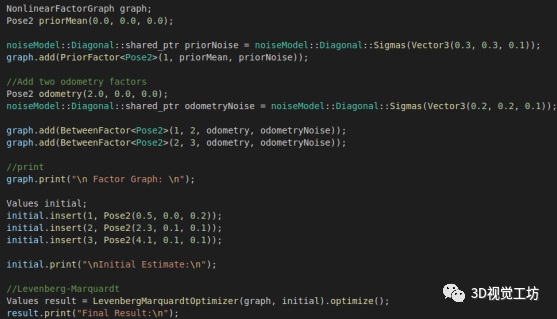
本次课程,我们首先会用几讲的时间带大家过一遍C++的基础知识,然后对三维视觉中常用的几个C++模块进行重点讲解,主要有指针、引用、类和对象、宏和模板、STL编程、栈和队列、智能指针,多线程,CMakeList这几个章节,另外会附上足够多的实践案例,也会在课程中给大家讲解面试技巧和面试题。力求通过本次课程的学习,彻底搞懂C++较难的一些模块,掌握SLAM等算法的编写套路,学会C++相关岗位的面试技巧。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
蓝牙4.0 BLE 技术为何如此受青睐?2017-11-11 15615
-
三维视觉测量技术知识科普2024-01-03 2161
-
三维逆向工程的成果及应用案例2016-03-02 3725
-
三维设计应用案例2019-07-03 2637
-
导磁材料的影响为何如此重要2021-02-03 2663
-
以太网为何如此耗电?如何去降低以太网的功耗?2021-05-17 3930
-
Linux是什么?这种操作系统为何如此流行?2009-07-30 1246
-
三维立体视觉技术的应用及其三维恢复方法介绍2017-10-20 1356
-
基于双目立体视觉的三维拼接和融合方法2017-11-03 1758
-
BLE低功耗蓝牙模块为何如此受欢迎?2017-12-01 1235
-
苹果C94是什么 为何如此火爆2019-03-18 10657
-
EMI为何如此重要_emi的原理2020-05-11 3417
-
三维计算视觉研究分析2023-06-19 1710
-
三维立体视觉之三维恢复方法2023-11-03 523
-
什么是边缘计算?它为何如此重要?2024-04-22 1933
全部0条评论

快来发表一下你的评论吧 !
