

机器人焊接系统基本组成结构详解
机器人
554人已加入
描述
机器人焊接系统基 本组成:
1、弧焊机器人
2、焊机+送丝机
3、焊枪及清枪装置
4、保护气体设备
5、工作台、工装夹具、变位机
6、安全系统(围栏、光栅、自动门、门锁等)
7、排烟系统
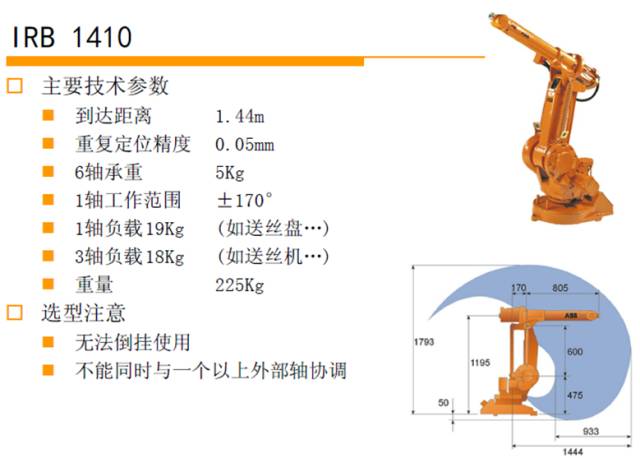
1、ABB弧焊机器人简介 :

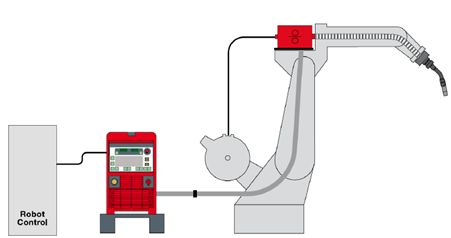
2、焊机与送丝机:
3、焊枪与清枪装置:
4、工作台及安全系统:
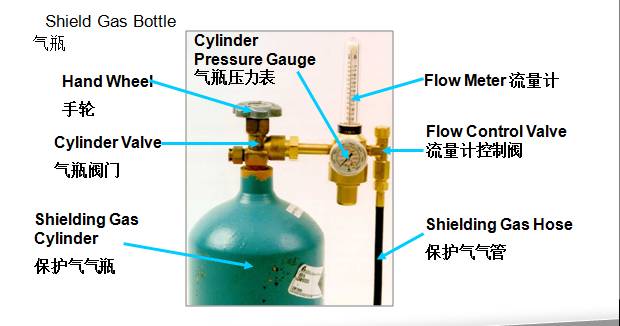
5、保护气体及辅助设备:
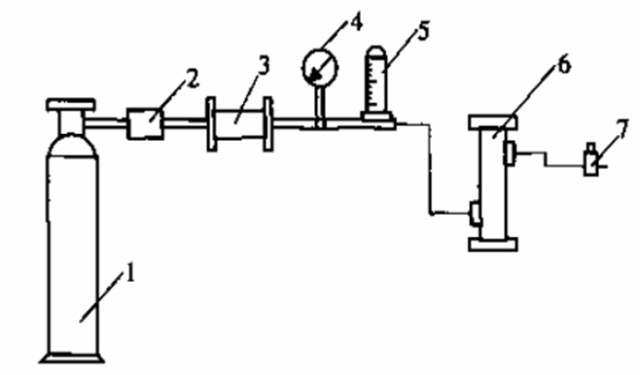
供气系统管路
1-气源 2-预热器 3-高压干燥器 4-气体减压阀 5—气体减压阀 6低压干燥器 7—气阀
6、排烟系统:
7、机器人弧焊系统配置:

8、电气连接:
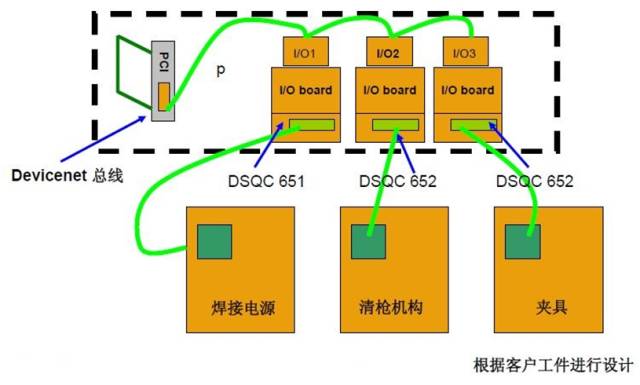
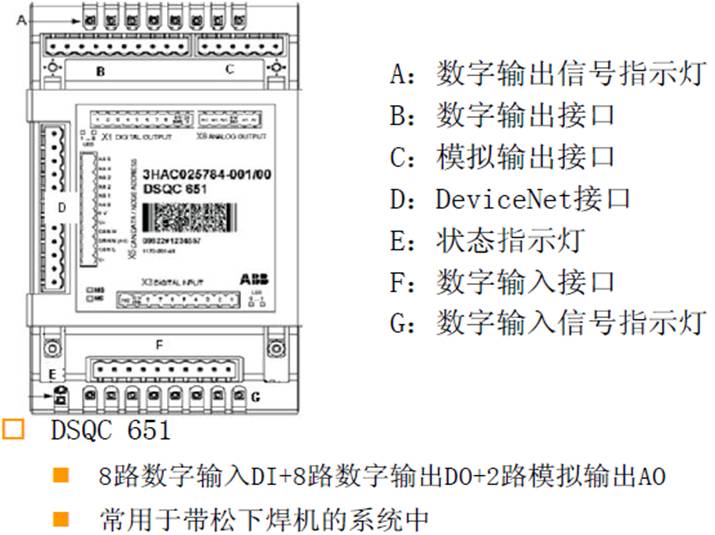
通常选择D651板 (8 DO, 8 DI, 2 AO(0~10V))
| AoWeldingCurrent(Ao): | 地址 0~15 控制焊接电流或者送丝速度 |
| AoWeldingVoltage (Ao): | 地址 16~31 控制焊接电源 |
| doWeldOn (数字输出): | 地址 32 起弧控制 |
| doGasOn(数字输出): | 地址 33 送气控制 |
| doFeed (数字输出): | 地址 34 点动送丝控制 |
| diArcEst (数字输入) : | 地址 0 起弧建立信号 |
对于如 Fronius,ESAB, Kemppi ,Miller 等焊接电源,ABB都有相应的标 准接口软件。如果没有相应的接口模块,则选用通用模板进行配置。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
医疗机器人有哪些基本组成_医疗机器人有哪些功能2024-10-21 3470
-
工业机器人控制系统的基本组成有哪些2024-06-16 4929
-
机器人焊接设备详解2023-07-07 3215
-
焊接机器人的结构组成2023-04-07 4324
-
焊接机器人的结构有哪些?2023-01-10 11842
-
焊接机器人的结构与原理2020-11-16 7915
-
焊接机器人的结构组成是什么?2020-03-20 2580
-
基于机器人的曲线焊接系统2018-03-13 5258
-
焊接机器人及系统介绍(焊接机器人系统组成和编程方法及发展趋势)2018-02-28 29930
-
焊接机器人的机械结构和控制系统的组成介绍2017-10-18 1662
-
机器人弧焊系统组成及分类2017-10-17 1456
-
浅析工业机器人的基本组成结构2016-10-25 6916
-
如何系统性地学习工业机器人技术?2016-03-06 3499
-
工业机器人的基本结构2015-01-19 9574
全部0条评论

快来发表一下你的评论吧 !
