

一种高精度巡航导弹的智能飞行控制系统设计
电子说
描述
本文讨论了一种高精度巡航导弹的智能飞行控制系统。在空间工程和技术领域,考虑了使用计算机程序和在计算机程序中研究空间分析的最有效方面。介绍了高速巡航导弹精确制导和制导的计算和计算机研究。因此,控制系统是通过基于人工智能的模糊逻辑方法设置的。高精度巡航导弹智能控制系统的计算机建模。巡航导弹控制系统需要大量的参数和复杂的数学计算模型和物理问题来控制智能系统。本文在计算机程序中提供了一个模拟器来测试高速巡航导弹。该模拟器是用C++编程语言在 Matlab 编辑器 R2015b 中编写的。
在本文中,巡航导弹被选为高速巡航导弹。火箭的控制系统是基于基于人工智能的晦涩逻辑方法。在空间工程和技术领域,太空和地面飞行试验在现实生活中是非常困难和不可能的。在空间工程和技术领域有许多类型的计算机软件,其中之一是Matlab编辑器R2015b.Matlab编辑器R2015b在复合体中对太空和地面巡航导弹的飞行系统进行建模和设计方面非常有效。在 Matlab 编辑器 R2015b 复合体中,我们可以通过为巡航导弹创建特殊的测试站点来进行研究。Matlab编辑器R2015b是该综合体的模拟器,它提供了巡航导弹的主要参数以及对作用空气动力和物理量的研究,同时考虑到弹道控制的原理。复杂模拟器中的Matlab编辑器R2015b选择巡航导弹的类型,目标并提供飞行参数和数值测量值。在现代人工智能系统中使用模糊逻辑的方法开发了巡航导弹控制系统,以获得最有效的解决方案。通过模糊的逻辑进行管理是非常有效的,并且像一个人付钱一样快地做出决定。高速巡航导弹在地面附近飞行并执行许多快速机动。因此,巡航导弹控制系统中实时求解和设置的最快方法是模糊逻辑法。在传统的经典控制系统中,许多初步参数和数学物理计算、编写控制算法和对控制系统进行建模会导致特定巡航导弹的控制出现大量错误,控制系统失效。而逻辑模糊的方法,让你在短时间内自己快速决策,给出巡航导弹控制的基本参数和影响,以及许多控制选项。如果您在巡航导弹的控制系统中使用模糊逻辑的方法 - 您可以做出非常快速、准确、正确的决策 该系统旨在确保高速飞行期间温度升高时的比赛安全。高速巡航导弹通过对飞行中遇到的问题和障碍做出快速准确的决策,成功完成目标飞行路线 根据发明该移动消防机器人的专利的主要思想获得的条形码。
人工智能中模糊的逻辑正在创建一个软件模拟器来控制高速制导导弹的飞行:
在理解人工智能之前,我们可以在理论意义上定义模糊逻辑方法的任务;
让我们定义高速制导巡航导弹的类型和用途;
确定高速制导巡航导弹飞行轨迹的参数数量(时间、距离、高度、旋转角度、机动性等);
根据参数确定高速制导巡航导弹飞行轨迹的数值尺寸;
识别高速制导巡航导弹飞行轨迹控制中的错误;
确定作用在高速制导巡航导弹飞行上的力;
我们可以开发一种控制高速制导巡航导弹的任务算法[7];
卫星通信、天气、诊断、分析单元、数字参数数量、导航系统、火箭重量、火箭高度、飞行距离、飞行时间和其他参数障碍包括数学和物理尺寸,具体取决于供应障碍物和作用力;
分配用于创建软件模拟器的软件包和程序语言;
具有人工智能的软件模拟器的虚拟测试,以控制巡航导弹的飞行[1]。
例如,在模拟器中,高速火箭的类型、型号、空气动力的计算在计算机软件包中进行测试。模拟器输入所选巡航导弹的飞行参数(飞行速度v,飞行持续时间l,飞行高度h和攻角G0,机动方向和外力)。
模拟器根据任务算法测试巡航导弹的飞行轨迹。在虚拟测试期间,计划将巡航导弹准确地对准目标,并最大限度地减少和消除目标精确着陆中的偏差和错误。在虚拟软件模拟器中,任何巡航导弹和喷气火箭,地面飞行物体都以虚拟方式进行测试。源于文章中关于智能群控系统中一组晦涩逻辑方法的机器人系统形成的控制和协调的研究。这种智能控制系统已广泛用于机器人和巡航导弹。
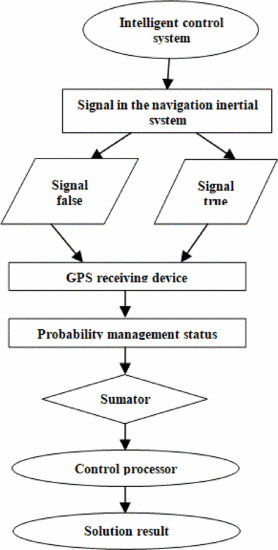
给出了控制高速巡航导弹的接收信号的算法方案
在高速巡航导弹控制中处理传入信号的算法方案。通过卫星信道接收的信号按上述框图所示的顺序进行处理。接收从卫星接收到的信号配备了一个特殊的GPS接收器设备,该设备可感应到2,5-3最大速度(1最大速度-340 m / s)的速度。该算法使用基于人工智能的模糊逻辑方法,通过在加法器环境中实时处理接收到的信号来做出和控制正确的决策。该虚拟软件模拟器可供在大学学习的空间专业人员,军事专家在对地面飞行物体进行实际测试时使用 提出了用于开发和实施基本算法的技术,用于在移动军事装备和高速射弹上的微控制器控制系统中设计飞行中的惯性导航系统自动化。该研究创建了一个简单的控制方案,因为我们不需要其他元素来控制智能控制系统的运行。结果是以下方案:
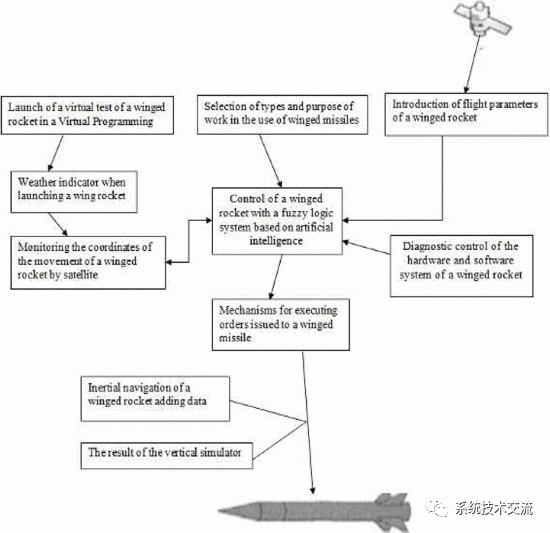
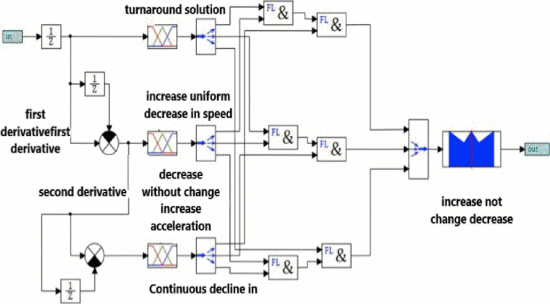
情报管理控制方案
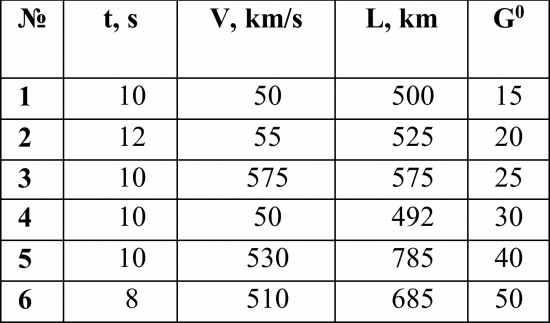
在表中输入了控制高速制导巡航导弹飞行的6种不同情况,该导弹实现了模糊逻辑的方法,以及4个不同输入参数的数值:
使用一个表格进入程序,该表格在 4 种不同情况下具有 4 个数字维度的 6 枚高速制导巡航导弹的参数值 [8]、[11]。
人工智能控制的高速制导巡航导弹算法的结构方案包括10个特殊块。Block 7使用基于人工智能的模糊逻辑系统来实现,以控制巡航导弹的飞行。7其余1、2、3、4、5、6、8、9、10个主块直接接触。与巡航导弹飞行控制相关的所有情况都由7个单元控制,其系统由图所示的结构算法控制。本文旨在提高移动设备内部导航的准确性,调整方向并确定使用高级卡尔曼滤波器时的值。
开发一种特殊的虚拟软件模拟器,用于以模糊的逻辑控制巡航导弹的飞行。可以通过模糊的逻辑调整巡航导弹飞行的控制 - 您可以将速度更改为快、慢、中、快。
在有翼火箭的高度,我们使用模糊的逻辑进行着陆——高、非常高、低、中低、正常。同样,我们通过在最后为有翼火箭的参数提供许多变体来控制和调整系统(真,真,快,非常快,高,非常高,低,远,近,非常近,快,快)。
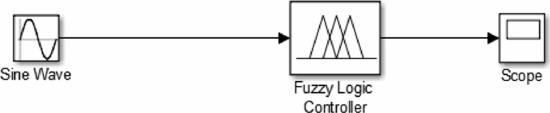
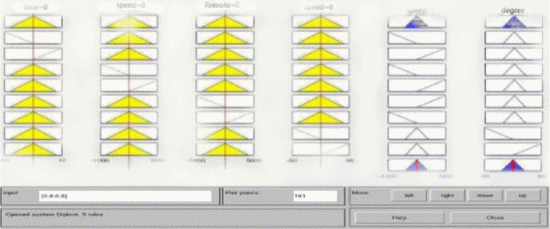
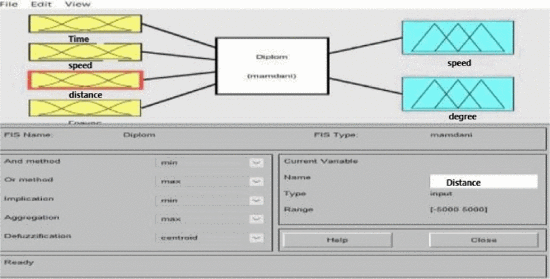
具有功能模糊逻辑控制系统的Matlab环境,用于高速制导巡航导弹
在控制高速巡航导弹的飞行轨迹时,我们使用选项 查找并选择最小的误差。
在高速巡航导弹控制中,在4种情况下给出了6个参数,产生了24种变体。
高速巡航导弹飞行轨迹中的参数 - 您可以看到时间、距离、速度、高度、角旋转度参数的变化图
在高速巡航导弹的飞行轨迹控制中,使用选项 ,我们可以找到并选择上面 中的最小误差。
可以看到高速巡航导弹飞行轨迹的校正和偏差,并显示了飞行方向的正弦轨迹[11],[12]。
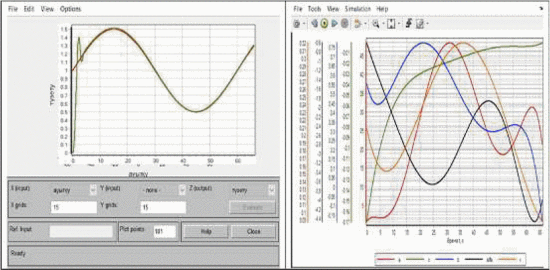
基于模糊逻辑的计算机软件综合体中虚拟软件模拟器的解决方案显示为3D图形 - 图。
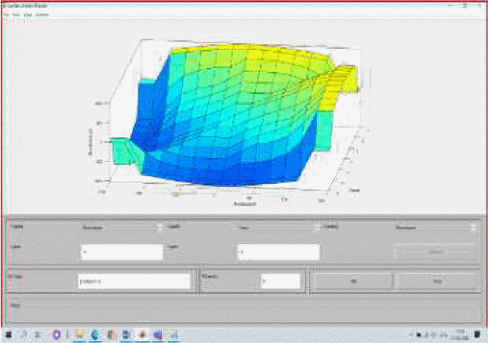
关于时间的模糊逻辑的 3D 图
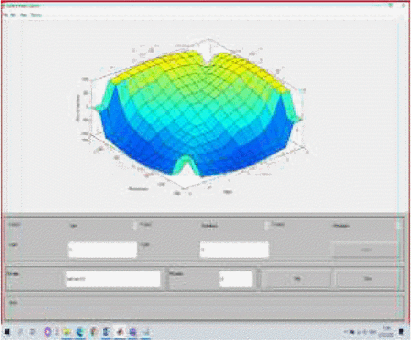
模糊逻辑与速度相关的 3D 图形
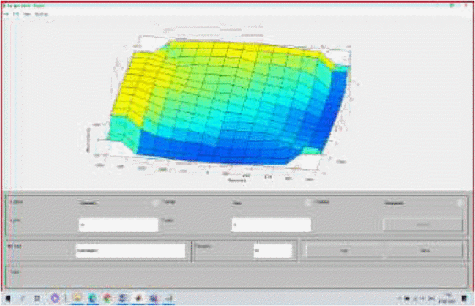
距离模糊逻辑的控制区域 3D 图形解决方案
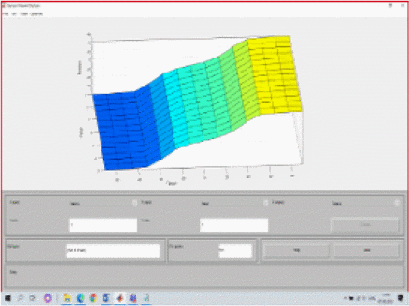
模糊逻辑相对于距离的迎角是一种3D图形解决方案
在计算机软件综合体的虚拟模拟器中测试的高速巡航导弹飞行参数的结果可以在精确物体方向偏差下方的塔贝中看到。高速巡航导弹的主要参数是从源获得的。
表一. 该表是程序中使用4种不同位置的4位高速巡航导弹测量值计算参数值时偏差误差的最终结果。
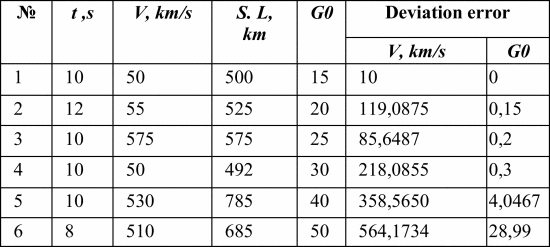
该表显示了接近0的高速巡航导弹的解,考虑到目标对准中的4个主要参数,接近0的解是减少或消除误差的正确解。正如他们在表格中看到的,旨在击中目标。卫星观测和太空探索太空飞行的方法取自这 6 篇参考文献中的文章。获得处理从空间图像接收的信号的方法。
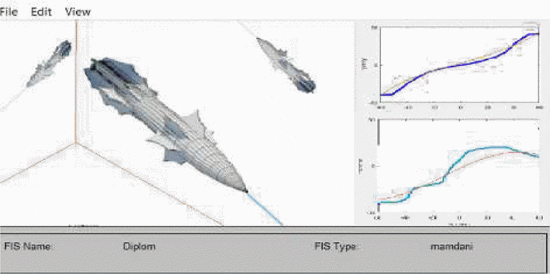
高速巡航导弹飞行的3D可视化
结果,在计算机软件综合体中对高速巡航导弹智能控制系统进行了虚拟测试,并在任务过程中给出了数值并获得有效的控制解决方案。
解决了高速巡航导弹飞行系统中模糊逻辑的主要任务,得到了24条不同的控制指令,考虑了4种基本飞行情况,给出了4个不同的参数。
采用模糊逻辑方法与高速巡航导弹正常控制系统对比了高速巡航导弹的智能控制。
一般来说,根据世界惯例,巡航导弹的正常控制存在很多错误,因为在正常控制中没有实时考虑巡航导弹的飞行轨迹和参数,而实际控制中的许多故障都失败了。结果,世界上十分之七的巡航导弹未能达到预定目标。
而在该系统中使用晦涩的逻辑方法,在人工智能的基础上进行控制,巡航导弹中有十分之九实现了目标并成功完成了目标。Sebd实时快速解决飞行路径中遇到的障碍和问题,并做出正确的决定。人工智能系统中的管理方法和软件取自本文。获得了基于模糊逻辑的智能巡航导弹控制系统开发和建模的正确解决方案。
控制器基于模糊逻辑,通过分析配置中过渡过程的灵活性和质量来做出决定。在模糊的逻辑中,参数数量越多,巡航导弹飞行的控制就越好。
它控制由云逻辑系统控制的高速巡航导弹的飞行,将其调整到控制轨迹,设置和移动,转动,放大并将其引导到正确的方向。
在计算机软件综合体中,虚拟程序基于巡航导弹飞行的 24 种不同控制选项的模糊逻辑,并通过模拟器精确访问特定目标,因此巡航导弹的工作基于实现特定目标。模型计算方法在高速征服控制优化中的主要思想取自本文。
在计算机软件包中,虚拟程序模拟器可用于虚拟测试任何巡航导弹,喷气火箭,普通火箭和巡航导弹,而无需特殊的测试站点。
在该计算机软件中,虚拟程序允许您根据基于人工智能的测试结果,在其他高速巡航导弹的模拟器中测试在模拟器中获得的高速巡航导弹的尖端。
审核编辑:汤梓红
-
请问怎样设计一种高精度智能变送器?2021-04-12 1459
-
请问怎样去设计一种基于Arduino Nano的智能门禁控制系统2021-08-23 2591
-
C2激光相干成像雷达在巡航导弹导航及战术弹道导弹末制导中的应2009-06-16 793
-
一种基于FF总线的智能控制系统设计2009-07-10 507
-
什么是汽车自适应巡航控制系统2010-03-17 3869
-
基于GPS空空导弹飞行轨迹系统设计2011-12-05 827
-
一种基于STM32的智能家居控制系统2016-06-14 1452
-
一种用于高精度随动控制系统的轨迹预测方法_巫佩军2017-01-07 696
-
汽车巡航控制系统的介绍2017-11-20 1709
-
导弹控制系统设计研究与分析2017-12-01 6484
-
基于PID控制的导弹分通道仿真[图]2018-01-21 1605
-
印度四平台通用神器布拉莫斯巡航导弹将在2019年装备空军2018-08-27 3032
-
HALCON发布首款反舰巡航导弹,利用GNSS+INS提供高性能2021-03-29 3826
-
什么是巡航导弹 巡航导弹的动力方式介绍2023-03-13 4236
-
巡航导弹技术特点及巡航导弹防御系统组成2023-11-06 2877
全部0条评论

快来发表一下你的评论吧 !
