

如何高效解析不定长度的协议帧?
描述
通信设计中考虑协议的灵活性,经常把协议设计成“不定长度”。一个实例如下图:锐米LoRa终端的通信协议帧。
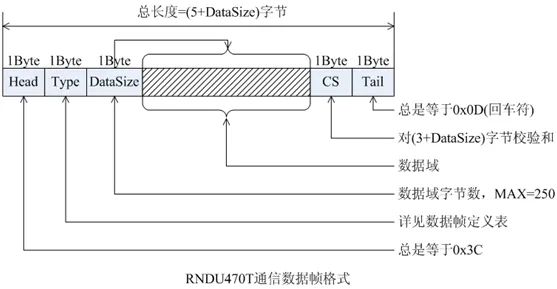
如果一个系统接收上述“不定长度”的协议帧,将会有一个挑战--如何高效接收与解析。
为简化系统设计,我们强烈建议您采用“状态机”来解析UART数据帧,并且把解析工作放在ISR(中断服务程序)完成,仅当接收到最后一个字节(0x0D)时,再将整个数据帧提交给进程处理。该解析状态机的原理如下图所示:
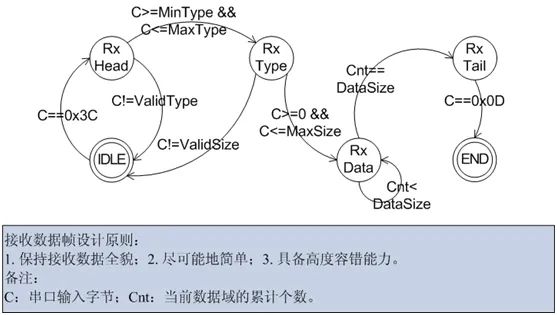
那么ISR处理这个状态机来得及吗?答案是:so easy!因为它只有3个动作,运算量十分小:
比较接收数据 -> 更新状态变量 -> 存储接收数据,C语言仅3条语句,翻译成机器指令也不超过10条。
代码清单如下:
/**
* @brief Status of received communication frame
*/
typedef enum
{
STATUS_IDLE = (uint8_t)0,
STATUS_HEAD, /* Rx Head=0x3C */
STATUS_TYPE, /* Rx Type */
STATUS_DATA, /* Data filed */
STATUS_TAIL, /* Tail=0x0D */
STATUS_END, /* End of this frame */
} COMM_TRM_STATUS_TypeDef;
/**
* @brief Data object for received communication frame
*/
typedef struct
{
uint8_t byCnt; /* Count of 1 field */
uint8_t byDataLen; /* Length of data field */
uint8_t byFrameLen; /* Length of frame */
COMM_TRM_STATUS_TypeDef eRxStatus;
uint8_t a_byRxBuf[MAX_LEN_COMM_TRM_DATA];
} COMM_TRM_DATA;
/**
* @brief Data object for received communication frame.
* @note Prevent race condition that accessed by both ISR and process.
*/
static COMM_TRM_DATA s_stComm2TrmData;
/**
* @brief Put a data that received by UART into buffer.
* @note Prevent race condition this called by ISR.
* @param uint8_t byData: the data received by UART.
* @retval None
*/
void comm2trm_RxUartData(uint8_t byData)
{
/* Update status according to the received data */
switch (s_stComm2TrmData.eRxStatus)
{
case STATUS_IDLE:
if (COMM_TRM_HEAD == byData) /* Is Head */
{
s_stComm2TrmData.eRxStatus = STATUS_HEAD;
}
else
{
goto rx_exception;
}
break;
case STATUS_HEAD:
if (TYPE_INVALID_MIN < byData && byData < TYPE_INVALID_MAX) /* Valid type */
{
s_stComm2TrmData.eRxStatus = STATUS_TYPE;
}
else
{
goto rx_exception;
}
break;
case STATUS_TYPE:
if (byData <= MAX_LEN_UART_FRAME_DATA) /* Valid data size */
{
s_stComm2TrmData.eRxStatus = STATUS_DATA;
s_stComm2TrmData.byDataLen = byData;
}
else
{
goto rx_exception;
}
break;
case STATUS_DATA:
if (s_stComm2TrmData.byCnt < s_stComm2TrmData.byDataLen)
{
++s_stComm2TrmData.byCnt;
}
else
{
s_stComm2TrmData.eRxStatus = STATUS_TAIL;
}
break;
case STATUS_TAIL:
if (COMM_TRM_TAIL == byData)
{
/* We received a frame of data, now tell process to deal with it! */
process_poll(&Comm2TrmProcess);
}
else
{
goto rx_exception;
}
break;
default:
ASSERT(!"Error: Bad status of comm2trm_RxUartData().
");
break;
}
/* Save the received data */
s_stComm2TrmData.a_byRxBuf[s_stComm2TrmData.byFrameLen++] = byData;
return;
rx_exception:
ClearCommFrame();
return;
}
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何使用DMA进行USART不定长度接收2025-02-18 1880
-
如何采用“状态机”解析UART数据帧2024-03-25 2232
-
C语言中怎么定义一个不定长度的数组?2023-10-09 682
-
单片机的通信协议该如何设计2022-07-05 3107
-
利用STM32F1的串口空闲中断实现不定长的数据断帧2022-02-17 1501
-
stm32 串口接收不定长度数据及黏包处理 + 串口DMA接收2021-12-23 2068
-
STM32 Uart是如何接收不定长度的数据呢2021-12-09 1781
-
STM32 HAL DMA串口接收不定长度的实现方法2021-12-08 1958
-
STM32串口接收不定长数据帧2021-12-06 1169
-
STM32串口通信 (采用链表接收不定长数据帧)2021-11-23 1308
-
stm32串口是如何实现接收不定长度数据的呢2021-08-11 1610
-
STM32单片机的接收不定长度字节数据的方法2021-08-04 1795
-
STM32单片机接收不定长度字节数据的方法解析相关资料推荐2021-07-01 842
-
用串口DMA传输不定长度包的方式2018-12-26 3223
全部0条评论

快来发表一下你的评论吧 !
