

特斯拉机器人作动器的动力关节结构示意图
机器人
描述
在特斯拉发布机器人的AI Day中,Actuator这个词被反复提及。其实Actuator这个词在翻译起来有时有些别扭,很多地方翻译成“执行机构”,但是其实它一般指一个部件,所以我觉得还是翻译成“作动器”比较的“信达雅”。其实简单来说就是产生动作的装置。而这次特斯拉机器人Teslabot的在Tesla AI Day 2022中的展示中,我最关注的其实就是作动器。
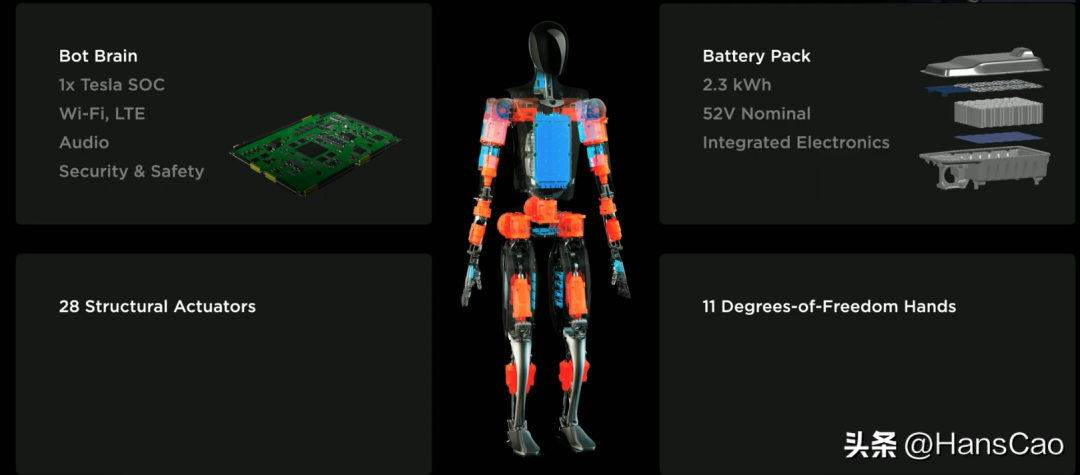
特斯拉机器人的电气部件示意图(来源:Tesla) 在Teslabot使用的作动器一共有28个,分为6个规格,其中两种类型主要是旋转和直线两种类型。

特斯拉机器人中使用的6种作动器类型(来源:Tesla) 旋转作动器其实没有太多新奇的地方,在一般的协作机器人的动力关节上都有类似的高度集成的设计。基本都是采用中空的直驱电机(DD)加上抱闸和减速机等部件实现的。在电机结构示意图中的Magnets就是指直驱电机转子上的永磁体。
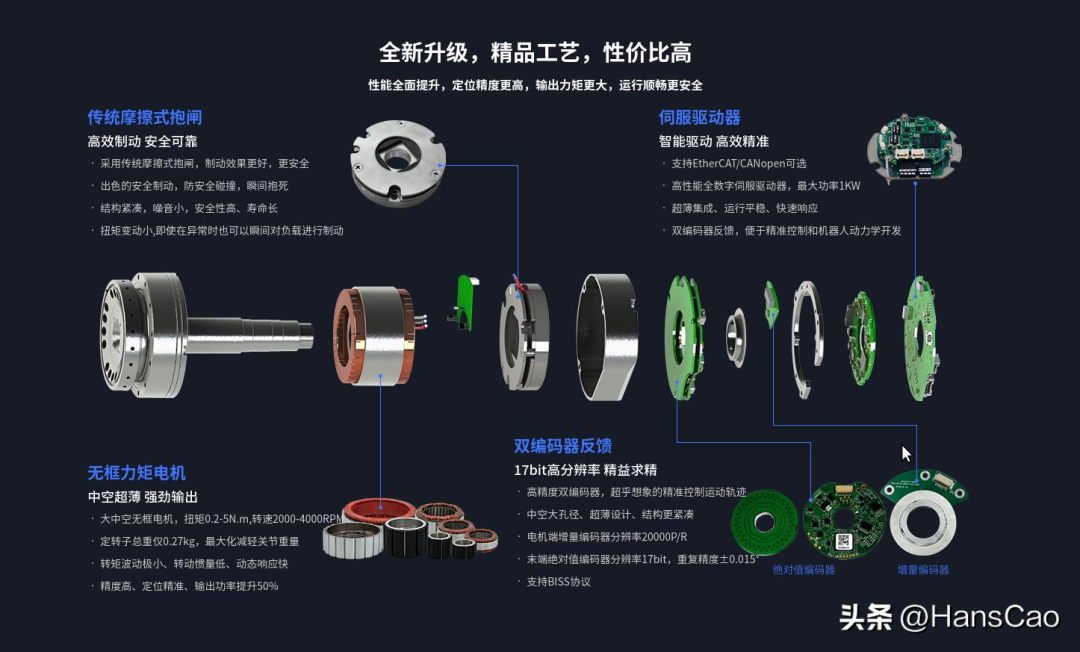
协作机器人动力关节结构示意图(来源:网络搜索) 但是其中还是有两个地方值得说一下。
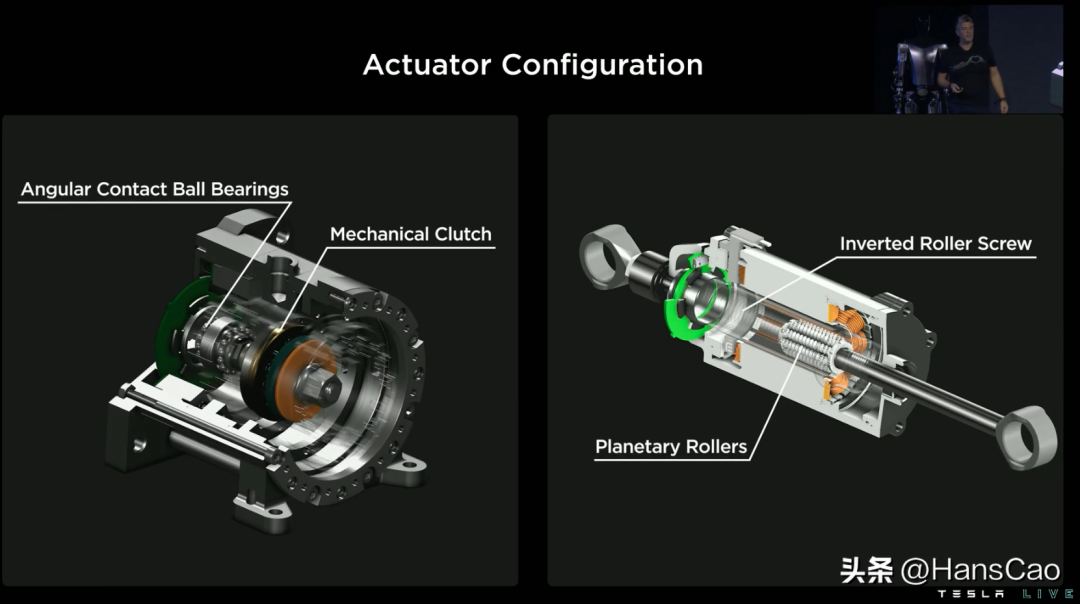
特斯拉作动器的结构示意图(来源:Tesla) 在一般作动器里面使用制动器作为一种断电后的保护设计,但是在Teslabot中我们看到了机械离合器的设计(Mechanical Clutch)。虽然很多电动制动器和电动离合器在结构上就是近亲,电动离合器有时就是制动器在结构上稍有变化而已,但是这次Teslabot里面使用离合器而不是制动器,让我好奇它的安全状态如果也是锁止的话,可能将制动和离合集成在一起的设计。在断电情况下就是一个制动器,在得电情况下可以输出扭矩。至于是否还有限制扭矩输出,安全闭环控制等功能就不得而知了。从离合器的体积来看,应该是个电磁式制动器,而位置又在减速机的出轴侧,应该是承担了一定的安全设计要求的。
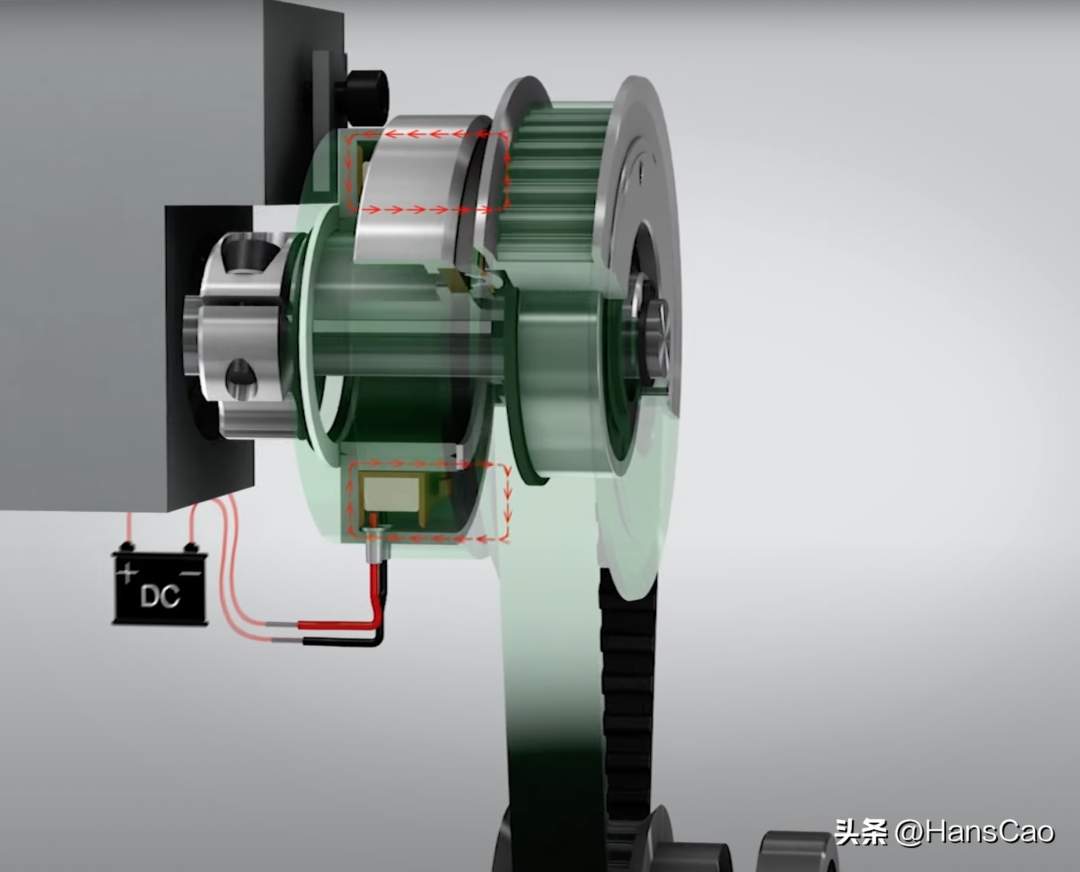
电磁离合器示意图(来源:KEB)
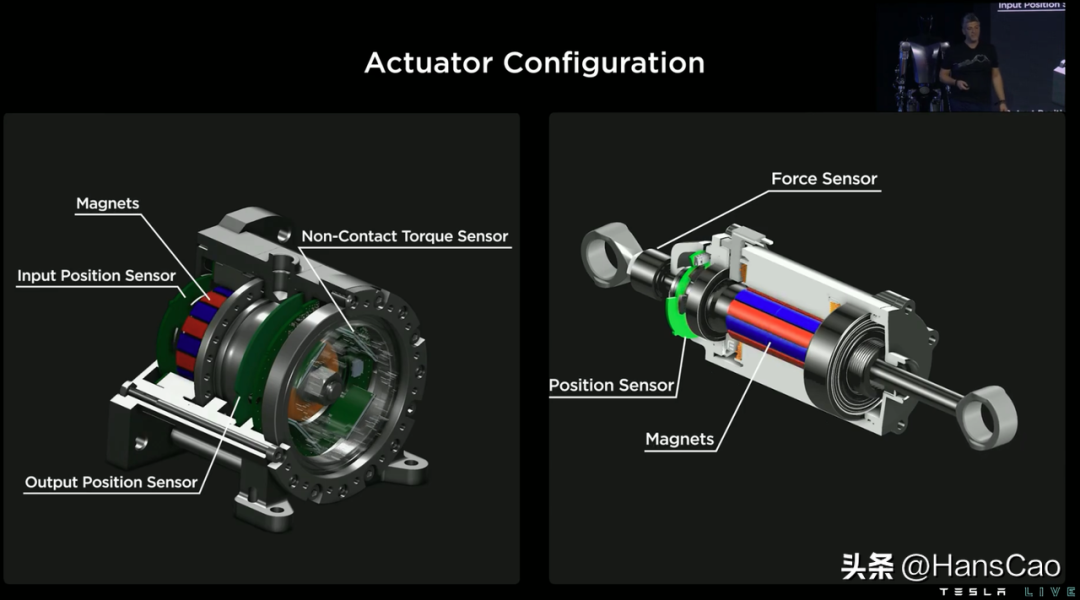
特斯拉机器人作动器结构示意图(来源:Tesla) 有意思的地方是直线作动器的设计。一开始我以为应该是采用直线电机的设计,毕竟这样结构可以比较简洁,而且业界早就有成熟的设计(Cylindrical Linear Motor)
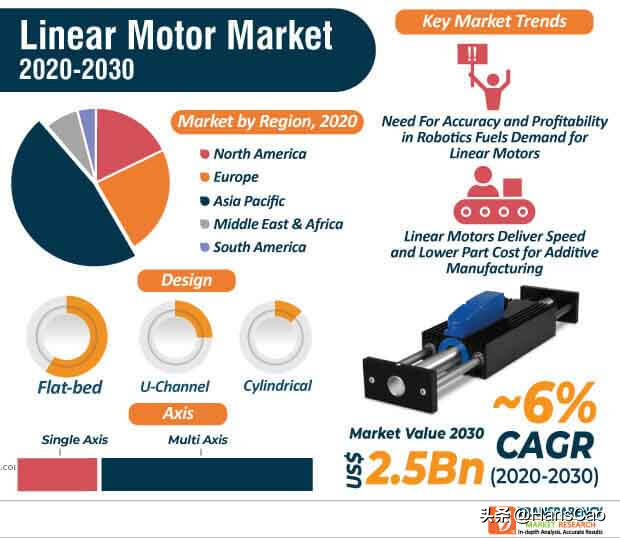
直线电机全球市场趋势(来源:Transparency)
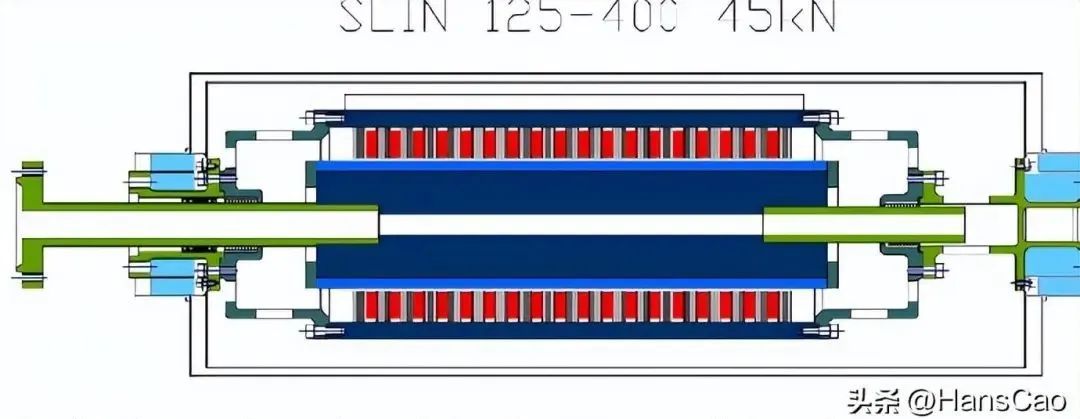
圆柱直线电机结构示意图(来源:Oswald)
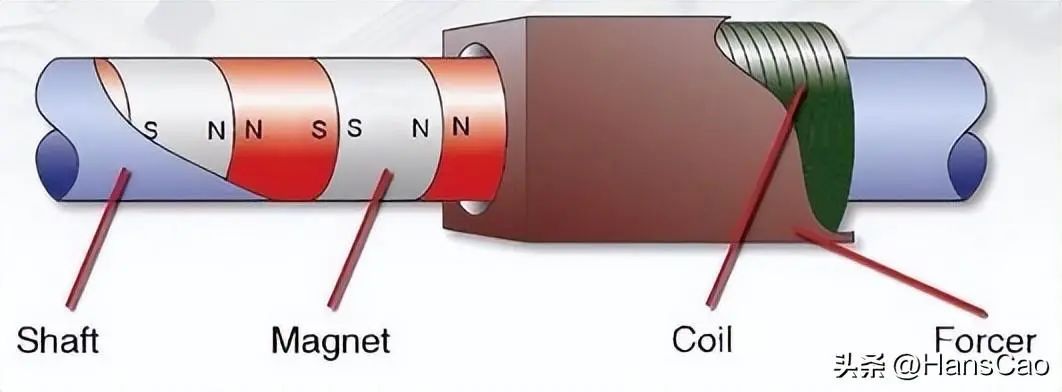
圆柱直线电机结构示意图(来源:网络搜索) 但是一看直线作动器里面的磁体方向和旋转作动器里面的磁体方向一致,就明白了,这个直线作动器也是旋转作动器一样的旋转磁场设计。而奥妙就在一个被称之为“行星滚柱”(Planetary Roller)的结构中。 在一些需要小体积的将旋转运动转化为直线运动的场合,将行星减速机(Planetary Gearbox)和丝杠结构结合的设计就出现了,在需要较大直线推力的情况下,行星滚柱结构的能量密度还是非常高的。 这种行星滚柱丝杠结构早在1942年由Carl Bruno Strandgren申请了法国专利,而1965他又在美国申请了循环滚柱丝杠的专利,这样的结构就更加紧凑和高效,类似滚珠丝杠的循环来增加效率。 有意思的是对行星滚柱丝杠的关注主要来自于运动控制领域,如AB,Bosch Rexroth,Moog等。如果Teslabot坚持使用这种滚柱丝杠结构,也许会让这种“老技术”焕发新的活力。 整体来说,Teslabot中的作动器集成度都非常高,其中将旋转执行器的集成度跟协作机器人类似,而直线执行器将电机和行星滚柱丝杠的结合也是将常见的丝杠电机推到了一个新的高度。 编辑:黄飞
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4424
-
机器人的关节结构是怎样设计的?2015-03-09 8459
-
混合动力汽车示意图2009-11-21 2388
-
三极管结构示意图2009-11-12 1030
-
游标卡尺的结构及示意图2009-06-08 18126
-
磁电式传感器结构示意图(转速转矩传感器结构原理图)2009-06-06 5861
-
飞机示意图2009-05-26 2604
-
原子结构示意图(视频动画)2008-05-28 21930
-
发动机配气相位结构示意图2008-04-12 3766
-
电子系统防雷结构示意图2006-06-30 1262
全部0条评论

快来发表一下你的评论吧 !
