

matlab-粒子群算法优化simulink中的pid参数详解
电子说
1.4w人已加入
描述
PSO(粒子群算法)在处理连续问题上有着较强的能力,因此很适合用来做参数优化,而PID控制器由三个参数组成,它们分别是:Kp 、Ki 、Kd 。
我们可以把PID控制器当做一个“黑箱”,输入为这三个参数,输出为响应曲线,我们要做的就是优化这个响应曲线。而一个控制效果好的PID控制器应针对不同类型输入都有较快的响应速度,较小的超调以及稳态误差。在本次分享中,选择输入信号为阶跃输入用来衡量PID控制效果。
PSO的适应函数选用综合指标来衡量设计效果,由于是数字控制器,我们选用求和而不是积分的方式:
在特定的问题中,这个适应函数也可以按照实际需求修改,比如分析超调量、稳定时间等,具体问题具体分析
PSO的主函数和之前的案例类似
参数设置
wmax = 1; % 最大惯性因子
wmin = 0.6; % 最小惯性因子
% w = 0.6; % 惯性因子
c1 = 2; % 加速常数
c2 = 2; % 加速常数
Dim = 3; % 维数
SwarmSize = 30; % 粒子群规模
ObjFun = @PSO_PID; % 待优化函数句柄
MaxIter = 10; % 最大迭代次数
MinFit = 0.1; % 最小适应值
Vmax = 1;
Vmin = -1;
Ub = [300 300 300];
Lb = [0 0 0];
其中的Ub和Lb分别是kp ki kd的上下限,开始优化的时候可以设置大一点,如果大概知道范围,也可以缩小范围,减少迭代次数
粒子群初始化
Range = ones(SwarmSize,1)*(Ub-Lb);
Swarm = rand(SwarmSize,Dim).*Range + ones(SwarmSize,1)*Lb; % 初始化粒子群
VStep = rand(SwarmSize,Dim)*(Vmax-Vmin) + Vmin; % 初始化速度
fSwarm = zeros(SwarmSize,1);
for i=1:SwarmSize
fSwarm(i,:) = PSO_PID(Swarm(i,:)); % 粒子群的适应值
end
%% 个体极值和群体极值
[bestf,bestindex]=min(fSwarm);
zbest=Swarm(bestindex,:); % 全局最佳
gbest=Swarm; % 个体最佳
fgbest=fSwarm; % 个体最佳适应值
fzbest=bestf; % 全局最佳适应值
迭代寻优
iter = 0;
y_fitness = zeros(1,MaxIter); % 预先产生4个空矩阵
K_p = zeros(1,MaxIter);
K_i = zeros(1,MaxIter);
K_d = zeros(1,MaxIter);
while( (iter < MaxIter) && (fzbest > MinFit) )
w = wmax-(wmax-wmin)/MaxIter*iter; %% 惯性权重因子调整
for j=1:SwarmSize
% 速度更新
VStep(j,:) = w*VStep(j,:) + c1*rand*(gbest(j,:) - Swarm(j,:)) + c2*rand*(zbest - Swarm(j,:));
if VStep(j,:) >Vmax, VStep(j,:)=Vmax; end
if VStep(j,:)< Vmin, VStep(j,:)=Vmin; end
% 位置更新
Swarm(j,:)=Swarm(j,:)+VStep(j,:);
for k=1:Dim
if Swarm(j,k) >Ub(k), Swarm(j,k)=Ub(k); end
if Swarm(j,k)< Lb(k), Swarm(j,k)=Lb(k); end
end
% 适应值
fSwarm(j,:) = PSO_PID(Swarm(i,:));
% 个体最优更新
if fSwarm(j) < fgbest(j)
gbest(j,:) = Swarm(j,:);
fgbest(j) = fSwarm(j);
end
% 群体最优更新
if fSwarm(j) < fzbest
zbest = Swarm(j,:);
fzbest = fSwarm(j);
end
end
iter = iter+1; % 迭代次数更新
y_fitness(1,iter) = fzbest; % 为绘图做准备
K_p(1,iter) = zbest(1);
K_i(1,iter) = zbest(2);
K_d(1,iter) = zbest(3);
end
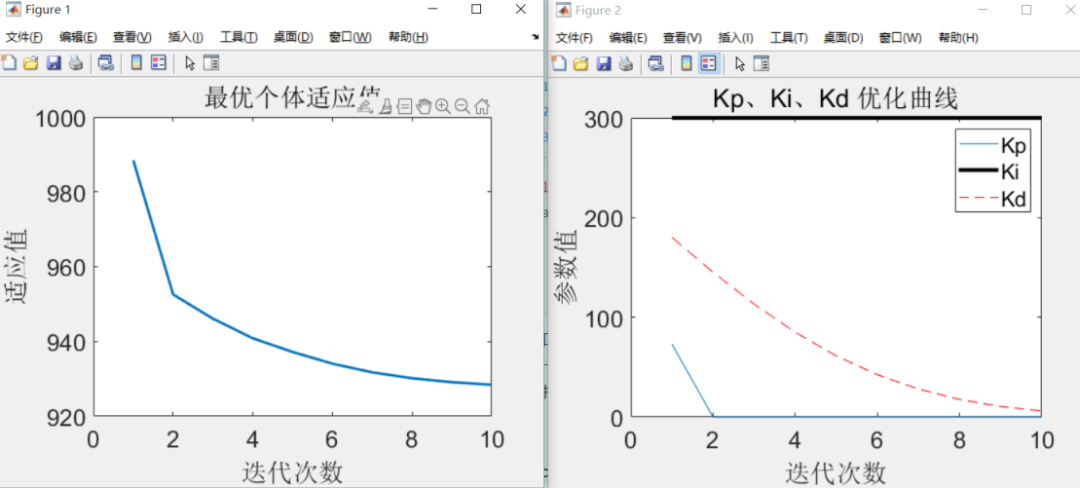
绘图输出
figure % 绘制性能指标ITAE的变化曲线
plot(y_fitness,'LineWidth',2)
title('最优个体适应值','fontsize',18);
xlabel('迭代次数','fontsize',18);ylabel('适应值','fontsize',18);
set(gca,'Fontsize',18);
figure % 绘制PID控制器参数变化曲线
plot(K_p)
hold on
plot(K_i,'k','LineWidth',3)
plot(K_d,'--r')
title('Kp、Ki、Kd 优化曲线','fontsize',18);
xlabel('迭代次数','fontsize',18);ylabel('参数值','fontsize',18);
set(gca,'Fontsize',18);
legend('Kp','Ki','Kd');
目标函数设计
function z=PSO_PID(x)
assignin('base','Kp',x(1)); %粒子依次赋值给Kp
assignin('base','Ki',x(2)); %粒子依次赋值给Ki
assignin('base','Kd',x(3)); %粒子依次赋值给Kd
try %% simulink仿真异常,返回一个极大值
y_out=sim('PID_Model',[0,20]); %使用命令行运行控制系统模型
z = y_out.yout{1}.Values.Data(end);
catch
z=1e6;
end
代码中assignin实现了m文件和simulink传递参数,其中y_out是simulink输出的目标变量,为啥这儿需要一个try呢,因为这个优化的过程中,可能参数设置不合理,会抛出simulink报错,故增加一个try避免代码异常出错提前结束优化过程
simulink模型用一个简单的pid控制带时延的传递函数
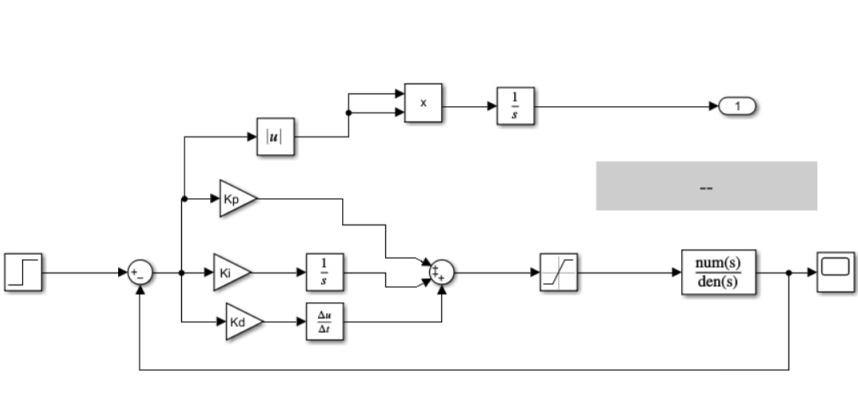
仿真结果类似这样,因为迭代次数很少,设计中可以加大,得到更优的结果
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- MATLAB仿真
- PID控制器
- 粒子群算法
- 数字控制器
- simulink仿真
-
改进粒子群算法的永磁同步电机PID控制器2025-05-28 281
-
永磁同步直线电机的粒子群PID空间矢量控制2025-03-27 415
-
粒子群优化算法的应用 粒子群优化算法研究方法2023-07-19 1326
-
基于模拟退火结合粒子群算法分析2022-01-03 1829
-
基于模拟退火结合粒子群算法介绍2021-12-29 1528
-
基于免疫粒子群优化算法的增量式PID控制2021-09-30 1217
-
【Simulink】粒子群算法(PSO)整定PID参数(附代码和讲解)精选资料分享2021-09-08 3437
-
粒子群算法城镇能源优化调度问题2021-07-07 1419
-
如何使用免疫粒子群优化算法实现增量式的PID控制2019-11-01 1891
-
基于粒子群优化的模糊PID控制器研究2018-03-05 1753
-
基于新粒子群算法优化向量机参数2017-11-13 766
-
PID控制器的量子粒子群多目标优化设计2011-01-27 781
-
PSO算法在数控机床交流伺服系统PID参数优化中的应用2009-05-17 4321
全部0条评论

快来发表一下你的评论吧 !
