

如何配置通用定时器外设产生PWM驱动舵机?
电子说
描述
1. 准备工作
硬件准备
- 开发板
首先需要准备一个开发板,这里我准备的是STM32L4的开发板(BearPi): - 舵机
舵机是电机的一种,又叫伺服电机,舵机的优势是 可以设定转到指定的位置 ,本文中使用的SG90型号的舵机可以在0°-180°的范围内转动到指定角度,在实际项目中使用非常广泛。
在硬件上,SG90 舵机有三根线,红色的为电源线(5V),棕色的为 GND ,橙色的为控制线,用来传输 PWM 信号。
那么,应该产生怎样的PMW波形来控制舵机的转动角度呢?
SG90的舵机要求 控制舵机的 PWM 信号频率在50Hz左右 ,即周期为 20ms 的 PWM 信号, 当该信号的高电平部分在0.5ms - 2.5ms之间时,对应舵机转动的角度 ,具体对应情况如下表:

下面结合一个动图来理解:
图片来源八色木
知识小卡片结束啦!对舵机有了解了吗?
软件准备
- 需要安装好Keil - MDK及芯片对应的包,以便编译和下载生成的代码;
Keil MDK和串口助手Serial Port Utility 的安装包都可以
2.生成MDK工程
选择芯片型号
打开STM32CubeMX,打开MCU选择器:

打开MCU选择器
搜索并选中芯片STM32L431RCT6:

选择芯片
配置时钟源
- 如果选择使用外部高速时钟(HSE),则需要在System Core中配置RCC;
- 如果使用默认内部时钟(HSI),这一步可以略过;
这里我都使用外部时钟:
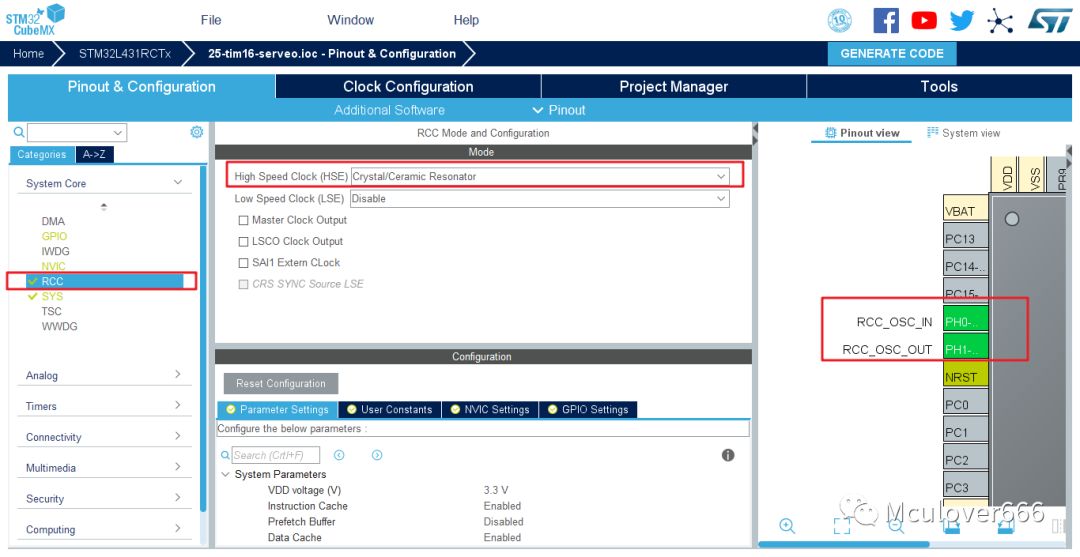
打开外部时钟
配置通用定时器TIM16
定时器TIM
STM32L431xx 系列有 1 个高级定时器(TIM1), 3 个通用定时器(TIM2、TIM15、TIM16),两个基本定时器(TIM6、TIM7),还有两个低功耗定时器(LPTIM1、LPTIM2)。
STM32L431 的通用 TIMx (TIM2、TIM15、TIM16)定时器功能包括:
- 16 位(TIM15,TIM16)/32 位(TIM2)向上、向下、向上/向下自动装载计数器,注意:
TIM15、TIM16 只支持向上(递增)计数方式; - 16 位可编程(可以实时修改)预分频器,计数器时钟频率的分频系数为 1~65535 之间的任
意数值; - 4 个独立通道(TIMx_CH1~4, 其中 TIM15 最多 2 个通道, TIM16 最多 1 个
通道);
这些通道可以用来作为:
- 输入捕获
- 输出比较
- PWM 生成(边缘或中间对齐模式)
- 单脉冲模式输出
如下事件发生时产生中断/DMA:
- 更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
- 触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
- 输入捕获
- 输出比较

接下来开始配置TIM16定时器的PWM功能:
首先选择TIM,选择通道1的功能,默认的CH1是PA6引脚,但是开发板上是与 PB8 连接的,所以在右边将PB8配置为TIM16_CH1:

打开TIM16并选择PWM输出引脚
接下来是对TIM16的参数设置,参照数据手册中的RCC时钟树,TIM16内部时钟来源是PCLK2 = 80Mhz,我们的目的是产生20Hz的PWM,所以预分频系数设置为80-1,自动重载值为20000-1,得到的计时器更新中断频率即为80000000/80/20000 = 50 Hz:

设置PWM输出频率
其余的一些设置保持默认即可,最后配置PWM占空比:

设置PWM占空比
配置时钟树
STM32L4的最高主频到80M,所以配置PLL,最后使HCLK = 80Mhz即可:
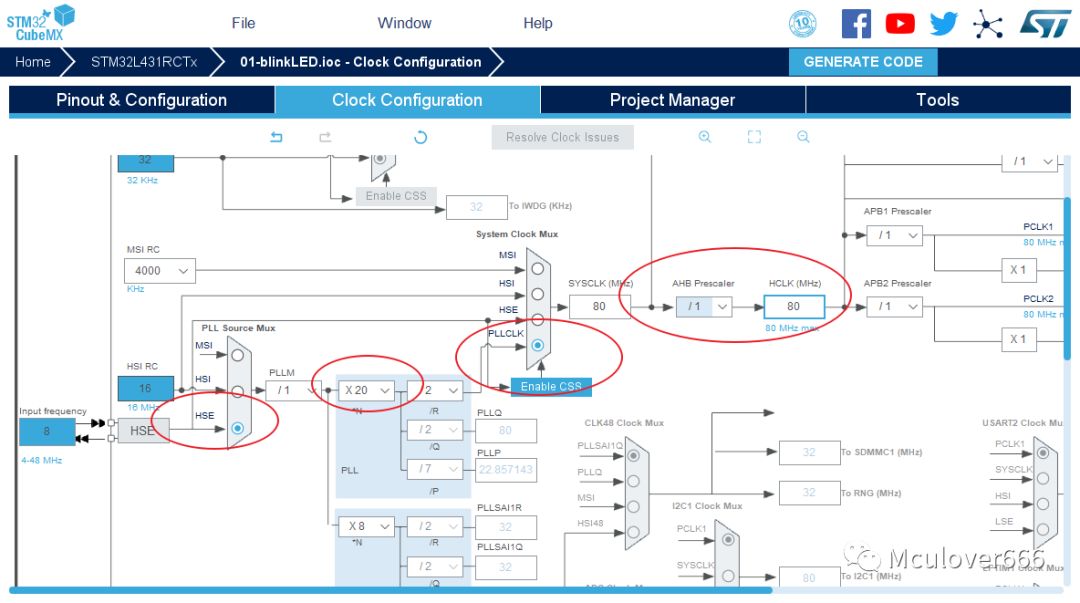
设置时钟树
生成工程设置

工程设置
代码生成设置
最后设置生成独立的初始化文件:
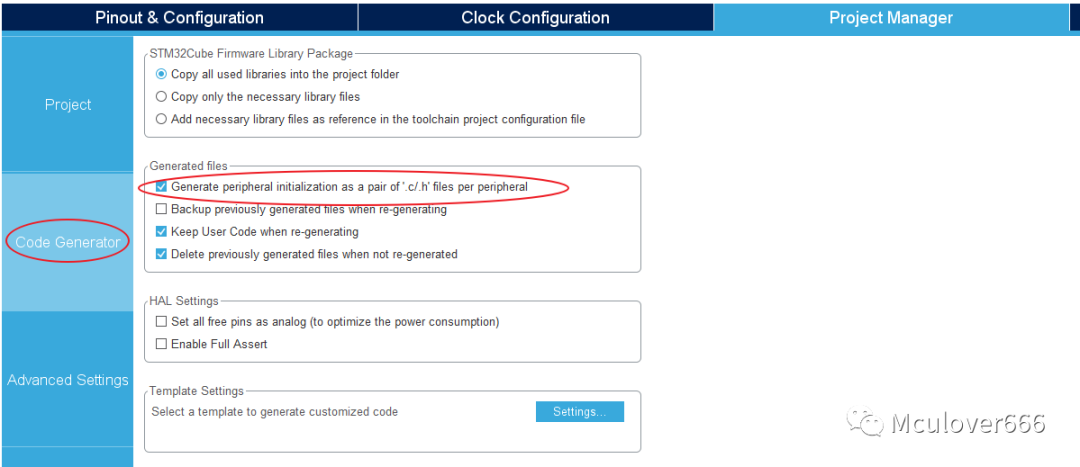
代码生成设置
生成代码
点击GENERATE CODE即可生成MDK-V5工程:

生成代码
3. 在MDK中编写、编译、下载用户代码
启动定时器并产生PWM
最后在main函数中开启TIM2并使能其中断(TIM2初始化代码之后):
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM16_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim16,TIM_CHANNEL_1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
编译下载之后,可以看到舵机旋转到45°:
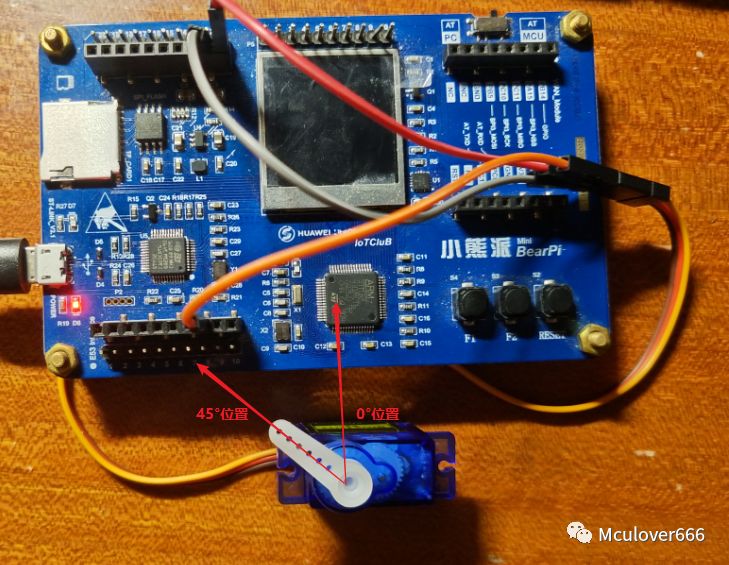
舵机转动45°现象
动态改变舵机角度
上一个实验中,我们配置了PWM波的高电平时长计数个数为1000,即时长为1ms,对应旋转角度为45°,在本实验中,我们来动态改变 PWM 占空比,使舵机在0°到180之间来回旋转。
编写如下代码:
int main(void)
{
/* USER CODE BEGIN 1 */
uint16_t pluse = 500;
/* USER CODE END 1 */
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM16_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//产生PWM,舵机转动
HAL_TIM_PWM_Start(&htim16,TIM_CHANNEL_1);
//1s后改变舵机角度,增加45°
HAL_Delay(1000);
pluse += 500;
if(pluse == 3000)
{
//如果舵机角度大于180°,回零
pluse = 500;
}
//设置PWM占空比
__HAL_TIM_SetCompare(&htim16, TIM_CHANNEL_1, (uint16_t)pluse);
}
/* USER CODE END 3 */
}
编译下载后可以看到舵机在0°-180°之间来回旋转。
至此,我们已经学会 如何使用通用定时器产生PWM驱动舵机 。
- 相关推荐
- 热点推荐
- RCC
- stm32cubemx
- 通用定时器
- PWM驱动
- MCU芯片
-
舵机的控制信号可以用定时器产生吗?2023-10-28 796
-
利用通用定时器输出PWM(附示例驱动直流电机)2023-04-03 627
-
如何使用555定时器来产生PWM2023-01-25 11698
-
通用定时器和高级定时器PWM波配置的区别2022-01-06 1905
-
STM32-通用定时器-PWM输出2021-11-26 1870
-
通用TIMx定时器输出PWM配置的流程是怎样的2021-11-23 1180
-
[STM32]通用定时器的使用2021-11-22 1437
-
配置基础定时器产生周期中断2021-08-19 774
-
STM32F4的通用定时器配置步骤2021-08-18 1528
-
如何使用STM32CubeMX配置STM32L431RCT6的通用定时器外设2021-08-17 822
-
使用cube配置定时器产生PWM驱动舵机2021-08-11 1137
-
如何利用stm32的高级定时器产生PWM2019-10-24 7487
全部0条评论

快来发表一下你的评论吧 !
