

I2C先写后读是什么
描述
I2C 读
I2C 先写后读
其实所谓的 I2C 读,都是先写后读。
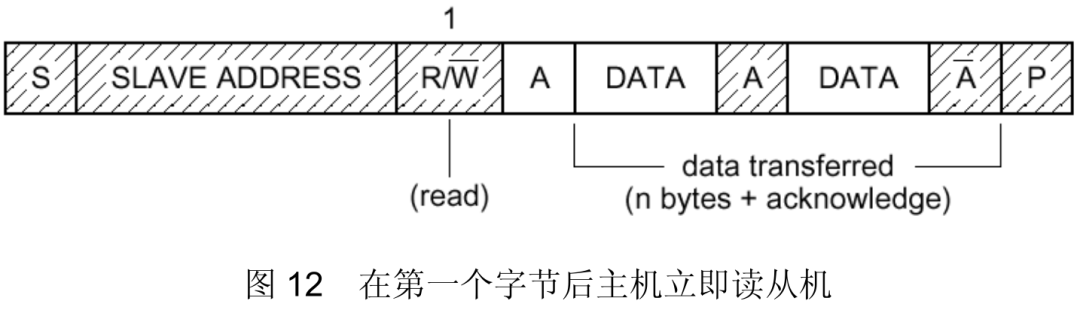
I2C spec 规定如下
详细解析如下(详细看图)
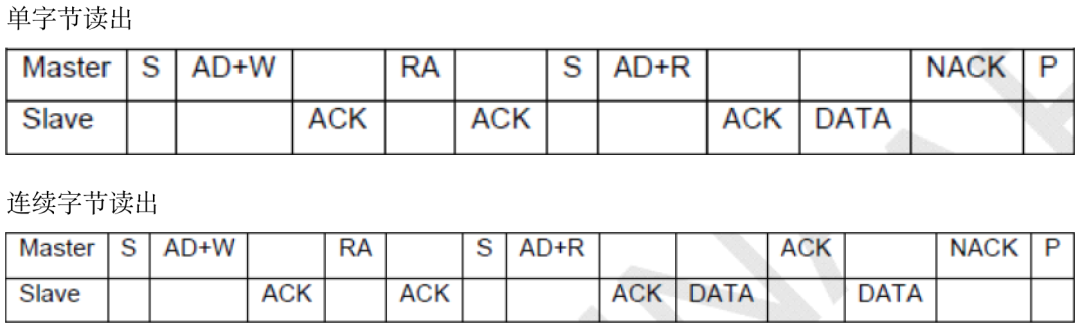
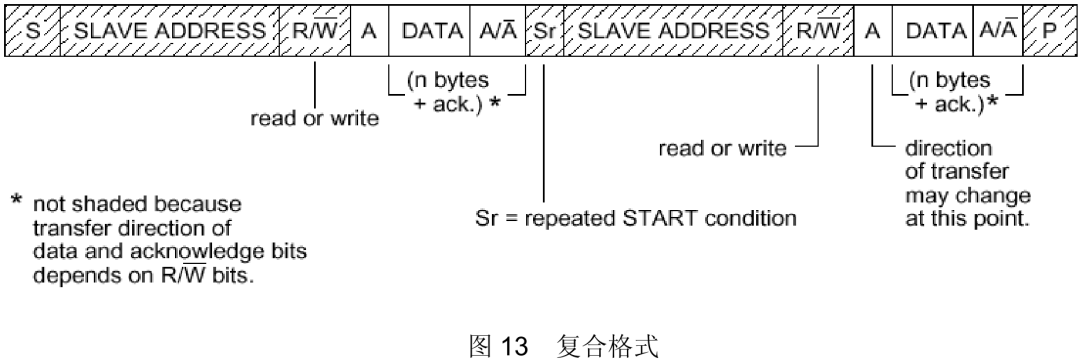
对从机进行读操作时,主设备发出开始标志 (S) 和读地址 (从机地址加一个 R/W 位,1 为读,0 为写)。等待从机产生应答信号。然后发送寄存器地址,告诉从机读哪一个寄存器。紧接着,收到应答信号后,主设备再发一个开始信号,然后发送从设备读地址。从机产生应答信号并开始发送寄存器数据。通信以主设备产生的拒绝应答信号 (NACK) 和结束标志 (P) 结束。
举例(例子进行了两次封装)
void ap3216c_readdata(struct ap3216c_dev *dev)
{
unsigned char i =0;
unsigned char buf[6];
/* 循环读取所有传感器数据 */
for(i = 0; i < 6; i++)
{
buf[i] = ap3216c_read_reg(dev, AP3216C_IRDATALOW + i);
}
}
static unsigned char ap3216c_read_reg(struct ap3216c_dev *dev, u8 reg)
{
u8 data = 0;
ap3216c_read_regs(dev, reg, &data, 1);
return data;
}
static int ap3216c_read_regs(struct ap3216c_dev *dev, u8 reg, void *val, int len)
{
int ret;
struct i2c_msg msg[2];
struct i2c_client *client = (struct i2c_client *)dev- >private_data;
/* msg[0]为发送要读取的首地址 */
msg[0].addr = client- >addr; /* ap3216c地址 */
msg[0].flags = 0; /* 标记为发送数据 */
msg[0].buf = ® /* 读取的首地址 */
msg[0].len = 1; /* reg长度*/
/* msg[1]读取数据 */
msg[1].addr = client- >addr; /* ap3216c地址 */
msg[1].flags = I2C_M_RD; /* 标记为读取数据*/
msg[1].buf = val; /* 读取数据缓冲区 */
msg[1].len = len; /* 要读取的数据长度*/
ret = i2c_transfer(client- >adapter, msg, 2);
if(ret == 2) {
ret = 0;
} else {
printk("i2c rd failed=%d reg=%06x len=%dn",ret, reg, len);
ret = -EREMOTEIO;
}
return ret;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
I2C总线—电平转换2023-11-02 8637
-
i2c采样是上升沿吗?2023-09-19 5277
-
I2C子系统SW Architecture2023-07-22 2143
-
ESP 12E I2c基卡的I2C IO卡设计2022-08-15 1053
-
硬件I2C与模拟I2C2021-12-28 3541
-
I2C LCD 器件通过驱动带有 I2C 接口的 2 线式 16 字符 LCD2017-10-10 1310
-
i2c2016-05-17 1131
-
基于51的I2c总线2016-01-13 2216
-
基于CPLD的I2C总线接口设计2011-02-12 1552
-
I2C Guid I2C指南2010-04-23 869
-
I2C总线规范与I2C器件C51读写程序2009-08-22 1158
-
i2c总线的特点2009-08-05 2704
-
i2c总线ppt(I2C总线器件应用)2008-08-13 1426
-
什么是i2c总线2007-11-05 4404
全部0条评论

快来发表一下你的评论吧 !
