

KUKA机器人Beckhoff I/O模块配置方法
电子说
1.4w人已加入
描述
EtherCAT 是 EtherCAT Technology Group 公司一种以以太网为基础的开放式
现场总线系统。
KRC4 配置 EtherCAT 输入输出模块

一、硬件 Hardware
二、软件 Software
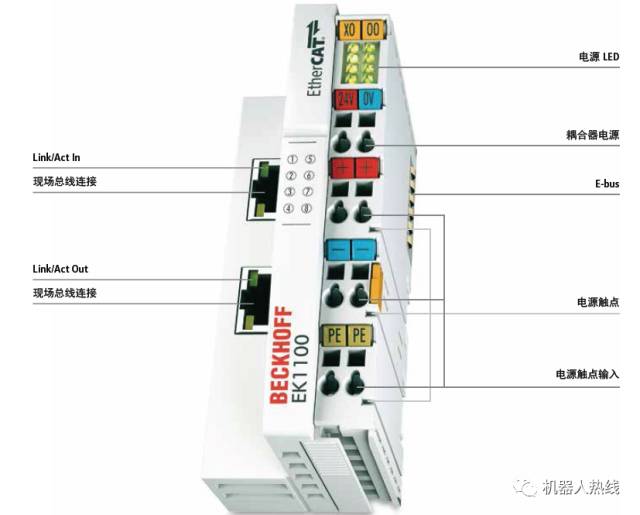
三、硬件连接 Connection
参照电气图纸将硬件连接。
四、WorkVisual配置 Configration
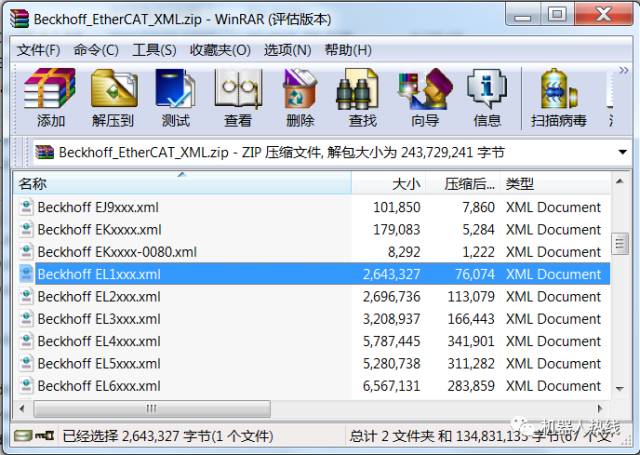
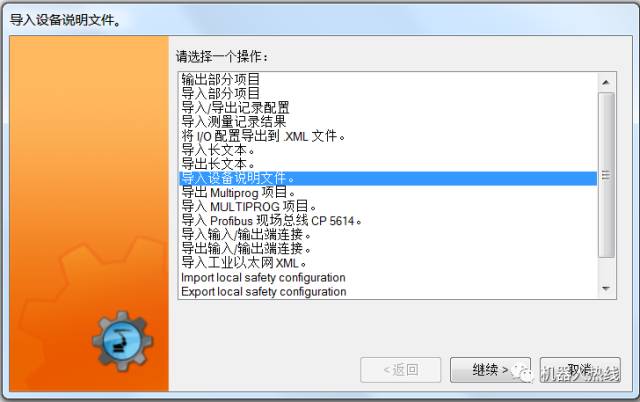
1.导入设备描述文件
参见 Workvisual。这里需要导入 EL1XXX 和 EL2XXX 两个文件。对应 输入模块 EL1809 、输出模块 EL2024/ EL2809。
注:根据模块的具体型号添加相应的 device description文件。
2.具体步骤:
打开 Workvisual, 菜单 File--- Import/Export --- Import device description file --- 选择文件类型 ESI,选择导入, device description导入完成。
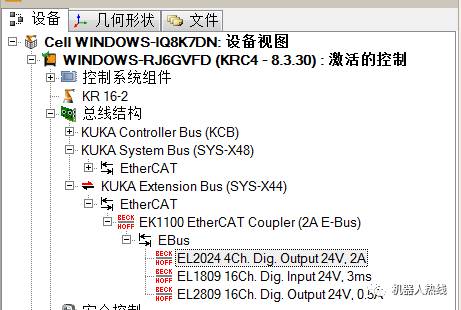
3.总线模块的配置

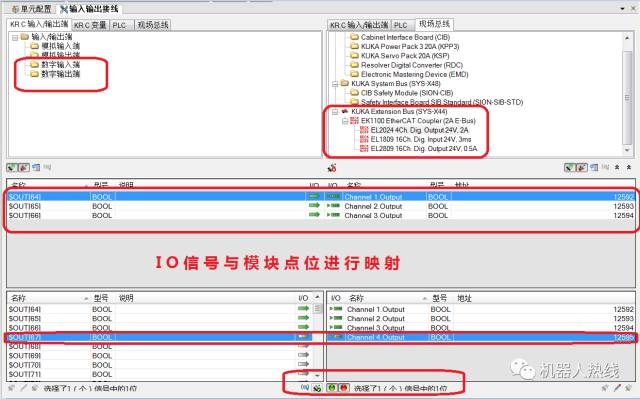
五、输入输出映射配置 IO Mapping
根据电气设计及电气信号的规划进行信号映射,在IO MAPPING 窗口进行相应信号ID的IO映射。具体过程如下图所示。
六、项目配置安装 Configuration Deployment

审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
KUKA重型机器人2015-02-03 8325
-
求KUKA机器人控制柜三维模型2016-04-18 6468
-
零基础玩转工业机器人2018-10-29 5040
-
KUKA机器人问题解答2019-07-15 2628
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12410
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10925
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8023
-
工业机器人组成结构相关资料分享2021-07-05 2748
-
库卡机器人MGV电源模块维修2021-09-08 1886
-
KUKA机器人伺服驱动模块维修2021-09-17 1892
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3894
-
KUKA库卡机器人MGV电源模块维修PH1013-28402022-01-12 1693
-
KUKA机器人PN系统网络故障的判断方法2022-03-11 5698
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1846
-
Kuka机器人配置Profinet通讯网关HT3S-PNS-ECS2024-06-13 2048
全部0条评论

快来发表一下你的评论吧 !
