

基于AOBS和芯片级器件的远距离激光雷达原理
MEMS/传感技术
描述
凭借其卓越的成像分辨率和范围,光探测和测距(LiDAR)正迅速成为包括自动驾驶车辆和机器人在内的智能自动化系统不可或缺的光学感知技术。下一代激光雷达系统的开发迫切需要一种在空间中扫描激光束的非机械光束控制系统。目前已经开发了各种光束控制技术,包括光学相控阵、空间光调制、焦平面开关阵列、色散频率梳和光谱时间调制等。然而,其中许多系统仍然体积庞大、脆弱且昂贵。
基于此,华盛顿大学Li Mo等人报道了一种片上声光波束控制技术,该技术仅使用单个千兆赫兹声波换能器将光束引导到自由空间。该技术利用布里渊散射的物理特性,即不同角度的光束被标记为独特的频移,使用单个相干接收器在频域内解析物体的角度位置,从而实现频率-角度分辨激光雷达。作者展示了一个简单的器件结构、光束偏转的控制系统和频域检测方案。该系统实现了18°视场、0.12°角分辨率的调频连续波测距,测距距离可达115 m。该演示可以扩展为一个阵列,实现具有宽二维视场的微型、低成本的频率-角度分辨LiDAR成像系统。这一发展标志着激光雷达在自动化、导航和机器人领域的广泛应用迈出了一步。
1)远距离激光雷达原理
如果声波频率足够高,则声波数将足够大,足以将光波导模式散射到光锥中,从而将光束转向自由空间,这是本工作声光光束控制(AOBS)的基础。作者提出了频率角分辨(FAR)激光雷达,作者通过基于芯片级AOBS设备的原型 FAR LiDAR 系统演示了激光雷达。
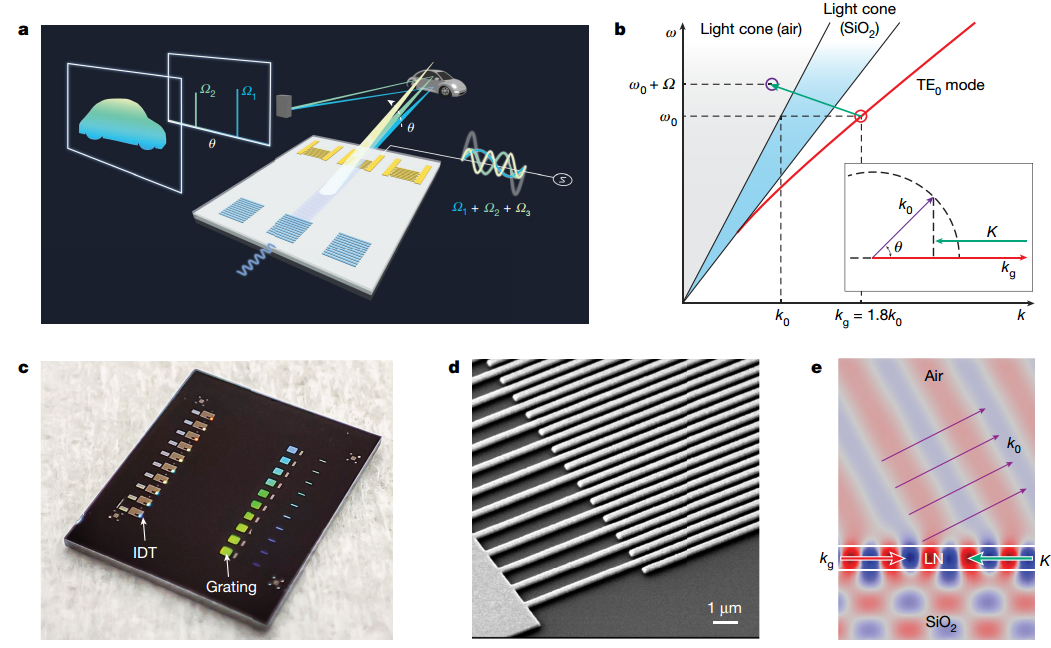
图1 基于AOBS和芯片级器件的远距离激光雷达原理
2)AOBS装置的波束控制
作者展示了AOBS装置的波束控制结果,结果表明,声波遭受高损耗,传播长度约为0.6±0.1mm,减少了有效AOBS孔径长度。相对较高的声学损失可归因于LNOI晶圆的键合界面和基底的泄漏。通过使用独立式LN膜或蓝宝石基板上的LN,可以显着减少声损失。模拟表明,在孔径长度为5mm、孔径宽度为100μm、声功率为23dBm的情况下,LNOI的效率可以提高到50%,超过了其他固态光束控制技术器件的效率。
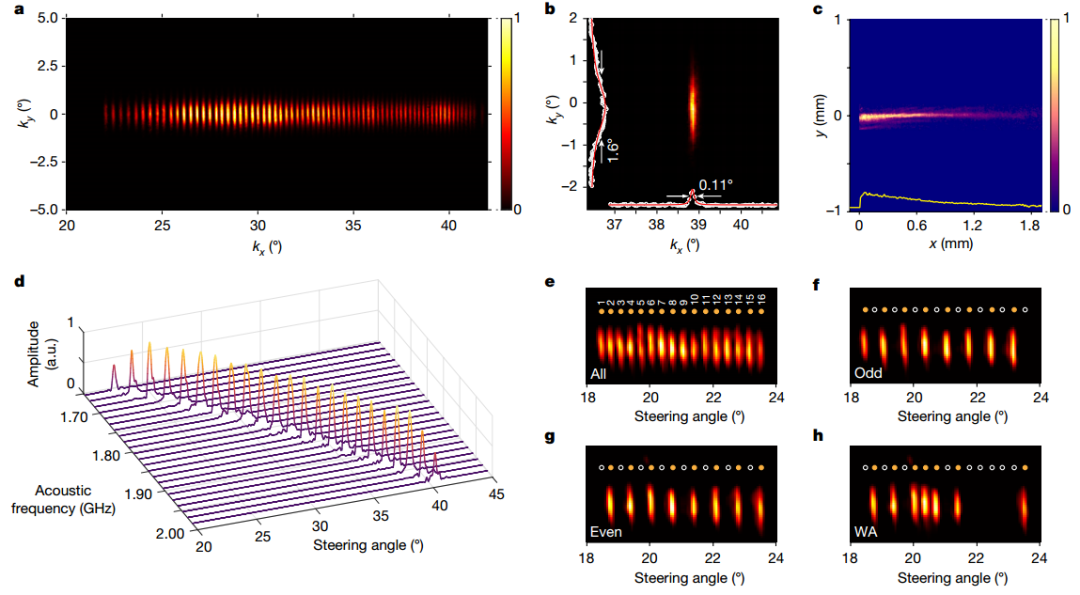
图2 AOBS 和多光束生成的表征
3)2D LiDAR成像
作者演示了2D LiDAR成像。在发射器中,AOBS设备以θ(Ω)角度将激光束转向远场中的物体。如果执行FMCW测距,则使用电光相位调制器(EOM)来生成线性调频光源。当AOBS在整个FOV上扫描光束时在接收器处测得的各种差拍信号,可以将频率Ω转换为角度θ’并重建物体的图像。作者展示了由尺寸为60×50毫米的,放置在距离激光雷达1.8米的逆向反射膜制成的哈士奇狗标志切口的成像。
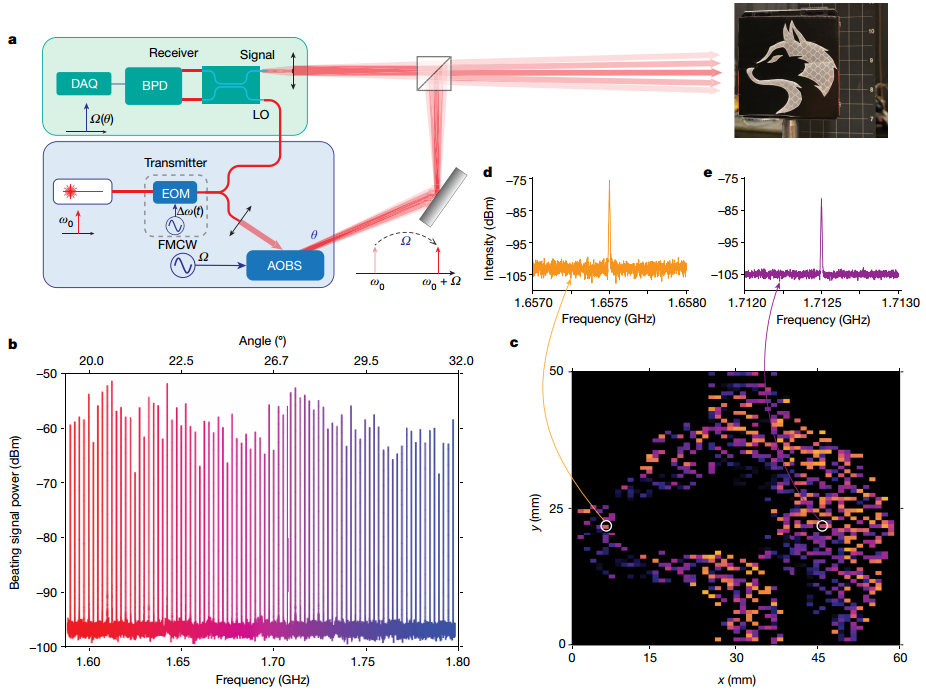
图3 2D 远距离激光雷达成像
4)3D LiDAR成像
为了实现3D成像,在FAR LiDAR中添加了FMCW测距。通过解析频率分量,可以在一次扫描中同时获取FAR和FMCW测量以及完整的3D LiDAR图像。作者对放置在距离LiDAR 0.5米处的一对不锈钢螺栓和螺母进行了成像。作者展示了使用AOBS设备支持的FAR和FMCW LiDAR方案进行3D成像。AOBS独特地转换转向光的角度和频率,从而实现频域成像。单个AOBS原型的电子限制开关速度为 1.5μs,相当于当高速探测器用于飞行时间或 FMCW 检测时每秒 0.67兆像素的成像速率。
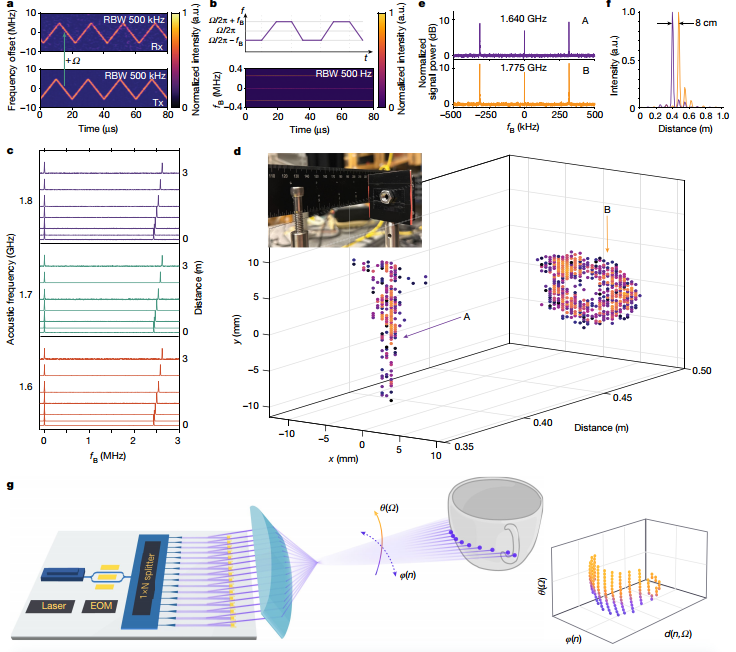
图4 通过FMCW和FAR LiDAR进行3D成像
编辑:黄飞
-
激光雷达分类以及应用2017-09-19 8924
-
常见激光雷达种类2017-09-25 14031
-
消费级激光雷达的起航2017-12-07 7514
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 21294
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 3196
-
非重复扫描激光雷达的测量距离能到多少?2022-10-05 20448
-
一文通过AEC-Q102车规级芯片测试认证了解激光雷达核心技术及行业格局2023-09-19 1041
-
MEMS激光雷达技术及其相比机械式激光雷达的优势!2019-04-16 16011
-
关于高性能激光雷达解决方案的介绍和应用2019-10-31 3648
-
中科院成功验证调频连续波远距离成像的能力2020-11-08 3406
-
MicroVision远距离汽车激光雷达性能可期2021-02-23 3638
-
补盲激光雷达的兴起2022-11-30 2021
-
高性能车规级激光雷达 - InnovizOne ™2022-05-26 1096
-
基于光子-电子集成回路的相干激光雷达引擎设计2024-04-22 2943
-
镭神智能发布LS-S4系列:千米级高精远距离光纤激光雷达,开启智能感知新纪元2025-03-21 1744
全部0条评论

快来发表一下你的评论吧 !
