

用TIM的PWM输出模式写一个步进电机的Stepper库函数
电子说
1.4w人已加入
描述
这是之前写平衡小车时自己用TIM的PWM输出模式写了一个步进电机的Stepper库函数。
1
调用顺序
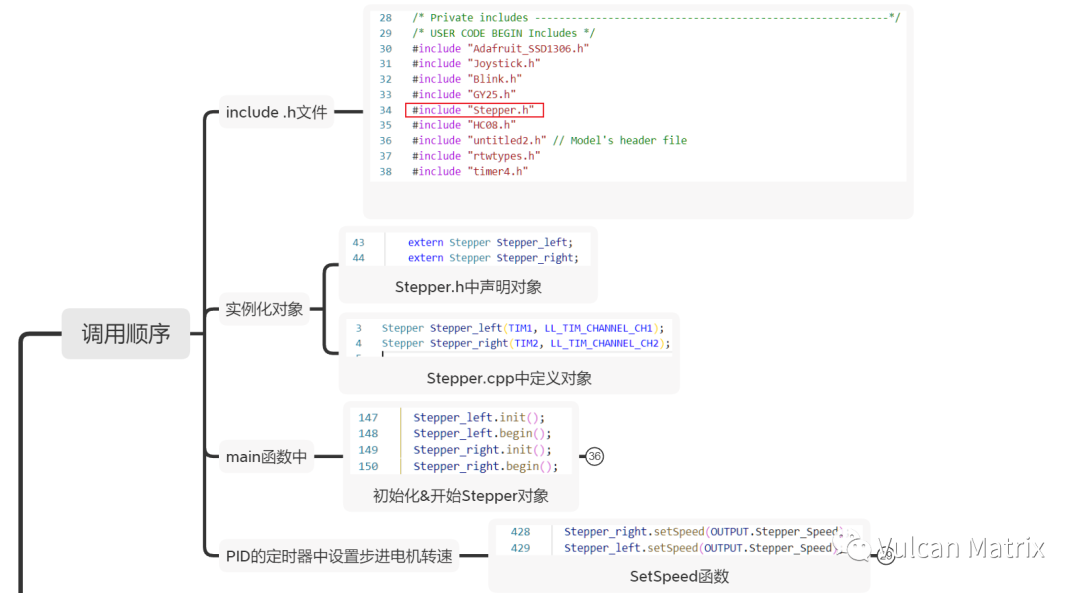
1.1
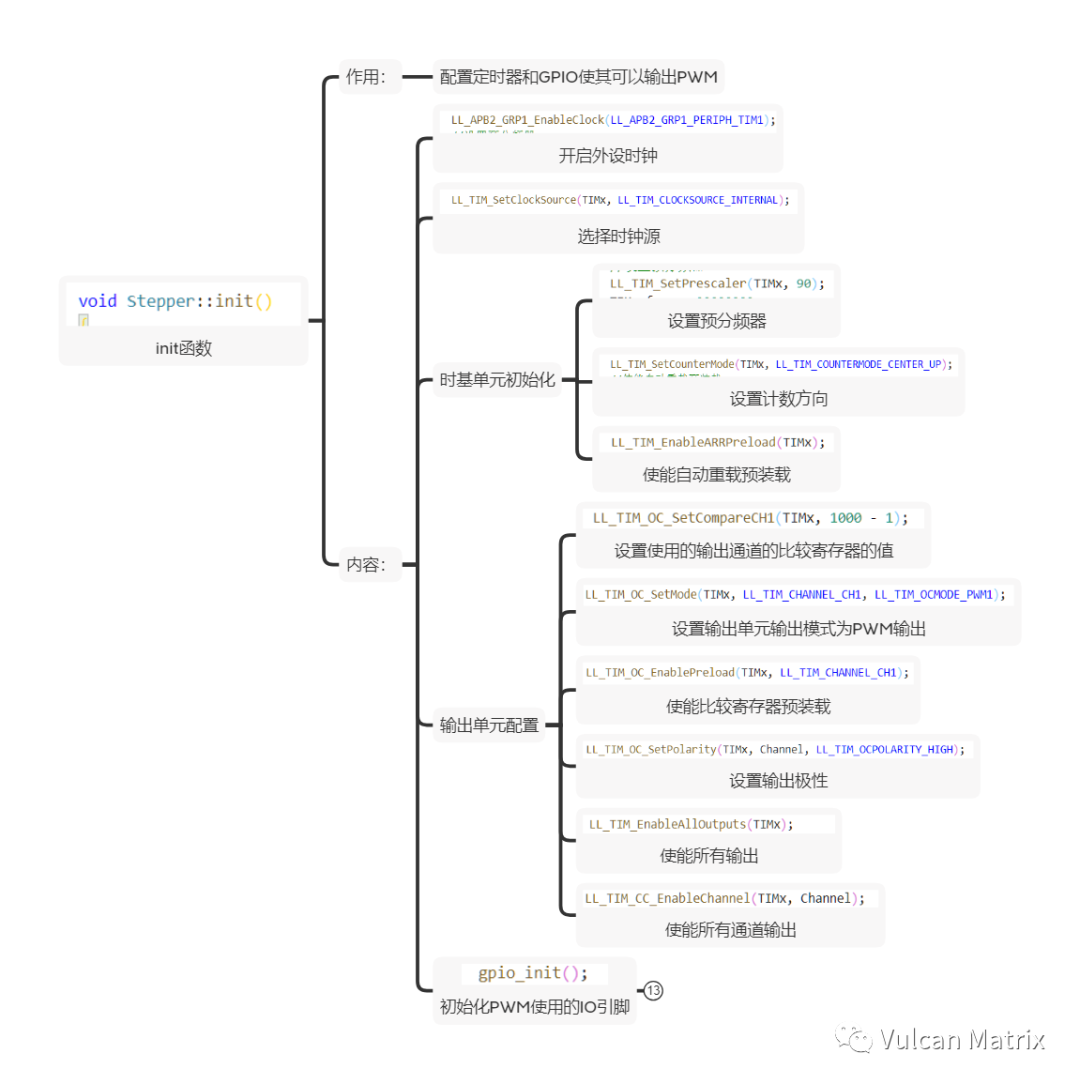
init函数
1.2
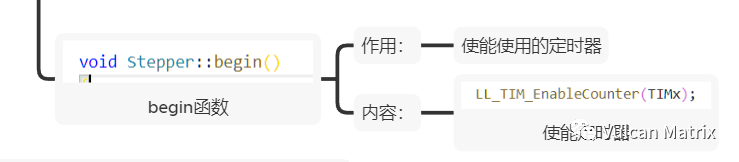
begin函数
1.3
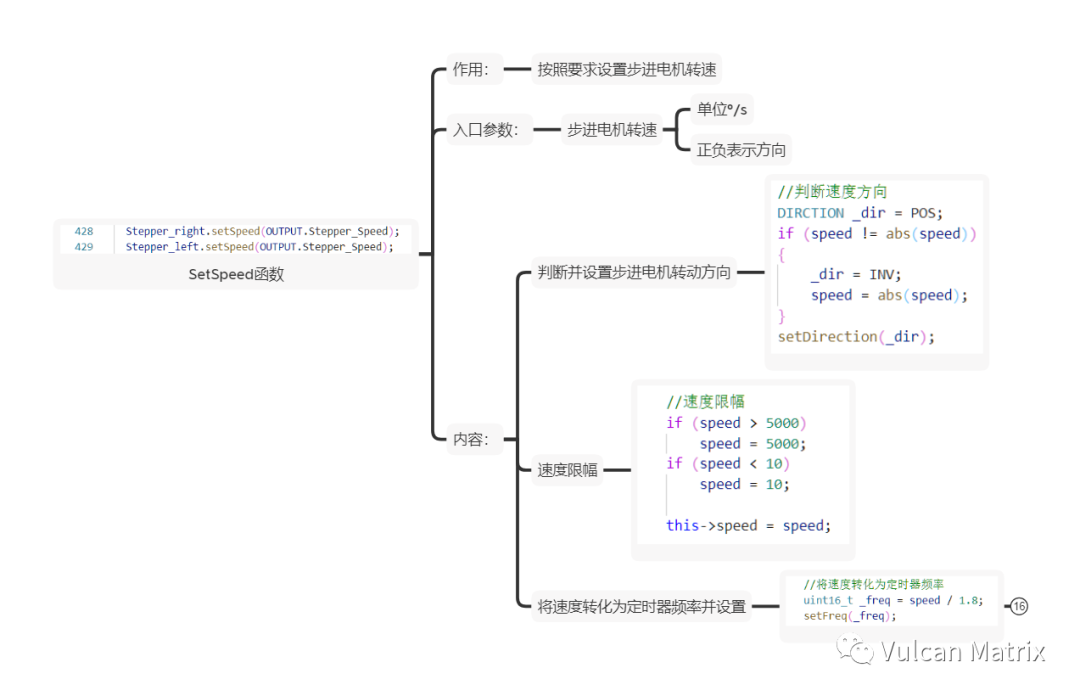
setSpeed函数
2
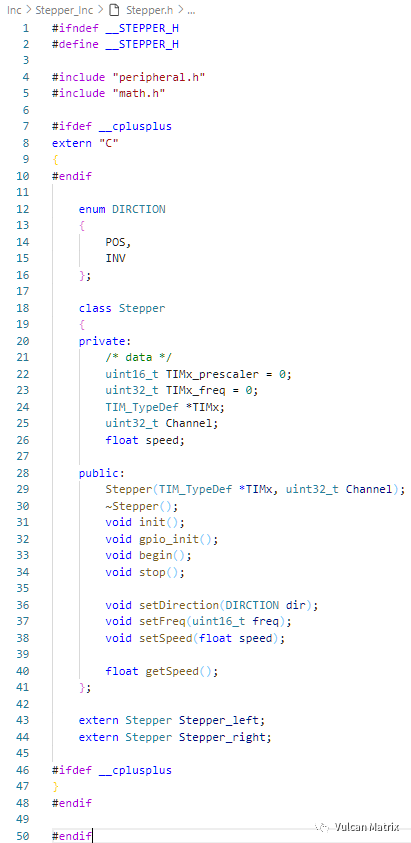
Stepper类结构
3
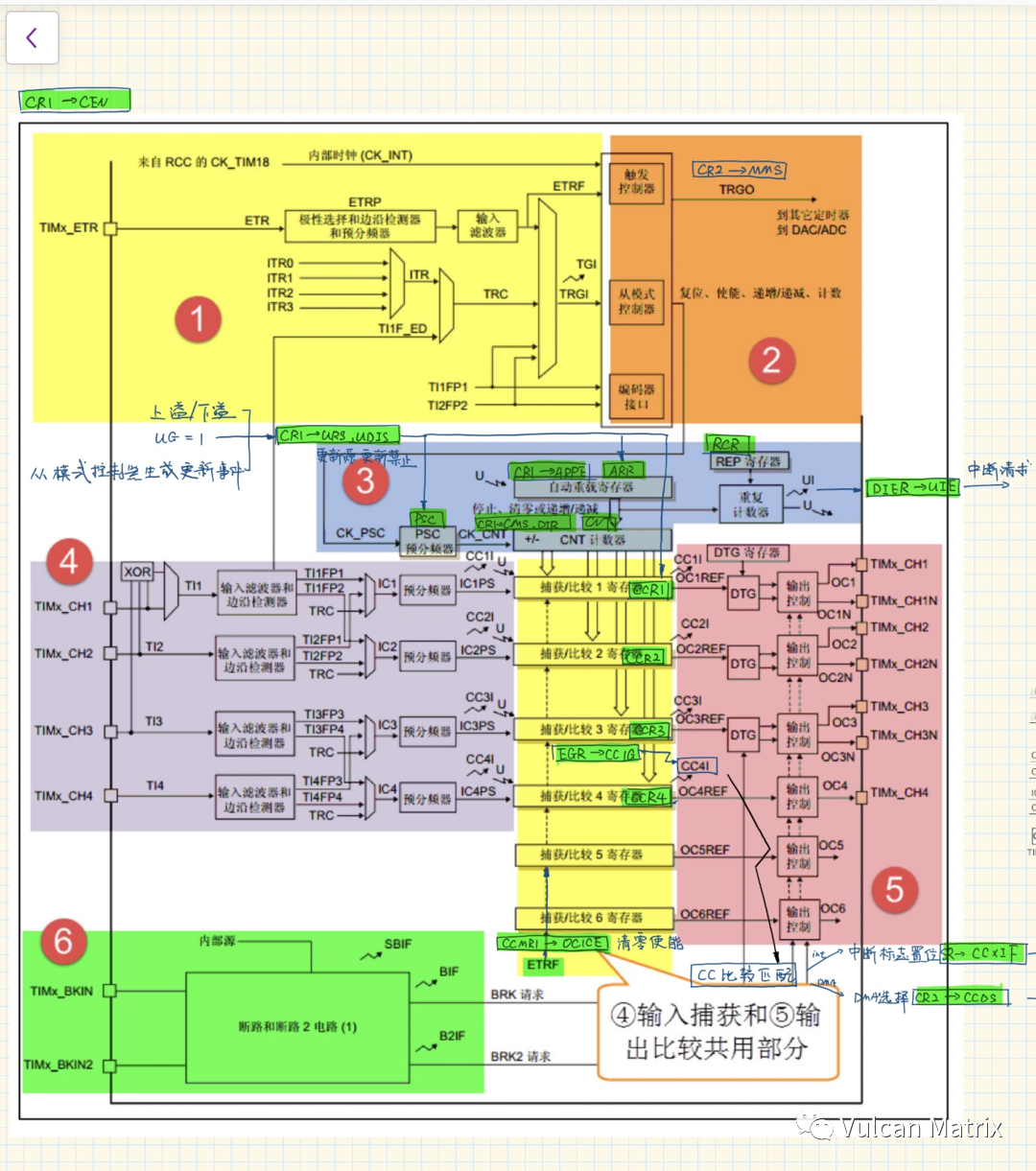
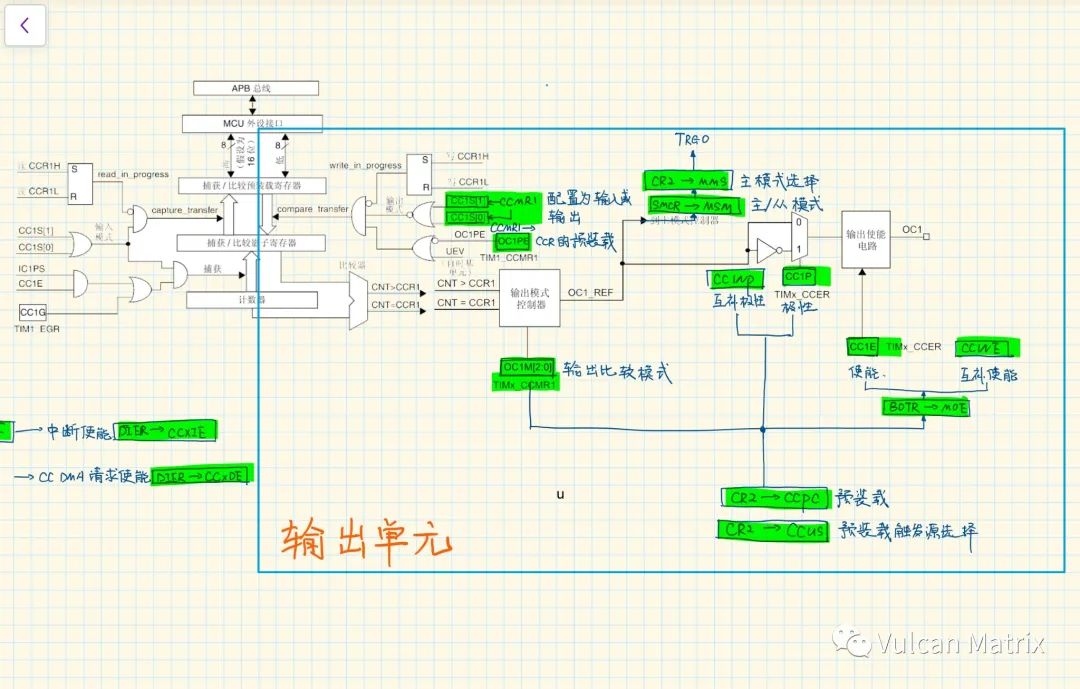
TIM结构框图
Stm32手册中的结构框图很重要,只要理解了外设的运行逻辑,按照逻辑一步一步给寄存器设值就可以让外设按我们的要求运行。
#ifndef __STEPPER_H
#define __STEPPER_H
#include "peripheral.h"
#include "math.h"
#ifdef __cplusplus
extern "C"
{
#endif
enum DIRCTION
{
POS,
INV
};
class Stepper
{
private:
/* data */
uint16_t TIMx_prescaler = 0;
uint32_t TIMx_freq = 0;
TIM_TypeDef *TIMx;
uint32_t Channel;
float speed;
public:
Stepper(TIM_TypeDef *TIMx, uint32_t Channel);
~Stepper();
void init();
void gpio_init();
void begin();
void stop();
void setDirection(DIRCTION dir);
void setFreq(uint16_t freq);
void setSpeed(float speed);
float getSpeed();
};
extern Stepper Stepper_left;
extern Stepper Stepper_right;
#ifdef __cplusplus
}
#endif
#endif
#include "Stepper.h"
Stepper Stepper_left(TIM1, LL_TIM_CHANNEL_CH1);
Stepper Stepper_right(TIM2, LL_TIM_CHANNEL_CH2);
Stepper::Stepper(TIM_TypeDef *TIMx, uint32_t Channel)
{
this- >TIMx = TIMx;
this- >Channel = Channel;
}
Stepper::~Stepper()
{
}
void Stepper::init()
{
//开定时器外设时钟
if (TIMx == TIM1)
{
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_TIM1);
//设置预分频器
LL_TIM_SetPrescaler(TIMx, 90);
TIMx_freq = 90000000;
TIMx_prescaler = 90;
}
if (TIMx == TIM2)
{
LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_TIM2);
//设置预分频器
LL_TIM_SetPrescaler(TIMx, 45);
TIMx_freq = 45000000;
TIMx_prescaler = 45;
}
//定时器选择时钟源
LL_TIM_SetClockSource(TIMx, LL_TIM_CLOCKSOURCE_INTERNAL);
//设置自动重载寄存器
LL_TIM_SetAutoReload(TIMx, 2000 - 1);
//设置计数方向
LL_TIM_SetCounterMode(TIMx, LL_TIM_COUNTERMODE_CENTER_UP);
//使能自动重载预装载
LL_TIM_EnableARRPreload(TIMx);
if (Channel == LL_TIM_CHANNEL_CH1 || Channel == LL_TIM_CHANNEL_CH1N)
{
//设置比较值
LL_TIM_OC_SetCompareCH1(TIMx, 1000 - 1);
//设置成PWM模式
LL_TIM_OC_SetMode(TIMx, LL_TIM_CHANNEL_CH1, LL_TIM_OCMODE_PWM1);
//设置捕获/比较寄存器值
LL_TIM_OC_EnablePreload(TIMx, LL_TIM_CHANNEL_CH1);
}
if (Channel == LL_TIM_CHANNEL_CH2 || Channel == LL_TIM_CHANNEL_CH2N)
{
//设置比较值
LL_TIM_OC_SetCompareCH2(TIMx, 1000 - 1);
//设置成PWM模式
LL_TIM_OC_SetMode(TIMx, LL_TIM_CHANNEL_CH2, LL_TIM_OCMODE_PWM1);
//设置捕获/比较寄存器值
LL_TIM_OC_EnablePreload(TIMx, LL_TIM_CHANNEL_CH2);
}
//设置输出极性
LL_TIM_OC_SetPolarity(TIMx, Channel, LL_TIM_OCPOLARITY_HIGH);
//使能输出
LL_TIM_EnableAllOutputs(TIMx);
LL_TIM_CC_EnableChannel(TIMx, Channel);
//GPIO初始化
gpio_init();
}
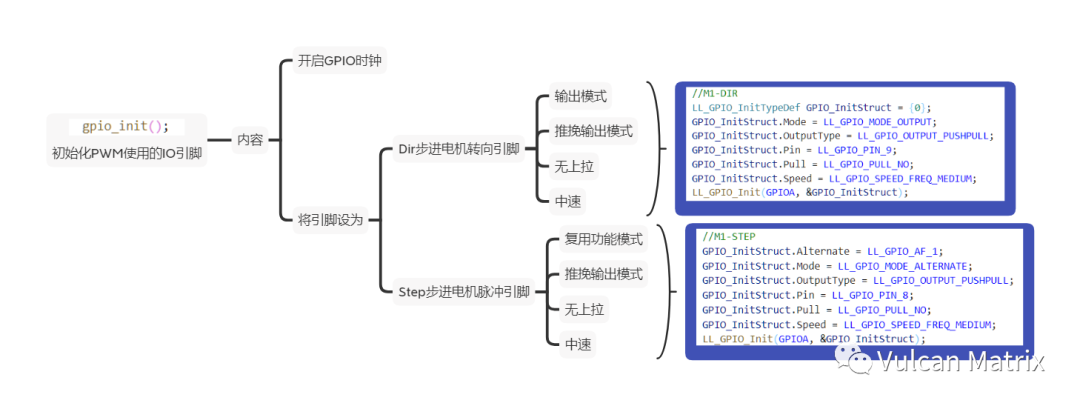
void Stepper::gpio_init()
{
if (TIMx == TIM1)
{
//开启GPIO时钟
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOA);
//GPIO选为AF
//M1-DIR
LL_GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Mode = LL_GPIO_MODE_OUTPUT;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pin = LL_GPIO_PIN_9;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_MEDIUM;
LL_GPIO_Init(GPIOA, &GPIO_InitStruct);
//M1-STEP
GPIO_InitStruct.Alternate = LL_GPIO_AF_1;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pin = LL_GPIO_PIN_8;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_MEDIUM;
LL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
if (TIMx == TIM2)
{
//开启GPIO时钟
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOB);
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOC);
//GPIO选为AF
//M2-DIR
LL_GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Mode = LL_GPIO_MODE_OUTPUT;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pin = LL_GPIO_PIN_7;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_MEDIUM;
LL_GPIO_Init(GPIOC, &GPIO_InitStruct);
//M2-STEP
GPIO_InitStruct.Alternate = LL_GPIO_AF_1;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pin = LL_GPIO_PIN_3;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_MEDIUM;
LL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
}
void Stepper::begin()
{
LL_TIM_EnableCounter(TIMx);
}
void Stepper::stop()
{
LL_TIM_DisableCounter(TIMx);
}
void Stepper::setDirection(DIRCTION dir)
{
if (dir == INV)
{
if (TIMx == TIM1)
{
LL_GPIO_WriteOutputPort(GPIOB, LL_GPIO_ReadOutputPort(GPIOB) & (~LL_GPIO_PIN_4));
}
if (TIMx == TIM2)
{
LL_GPIO_WriteOutputPort(GPIOB, LL_GPIO_ReadOutputPort(GPIOB) & (~LL_GPIO_PIN_10));
}
}
if (dir == POS)
{
if (TIMx == TIM1)
{
LL_GPIO_WriteOutputPort(GPIOB, LL_GPIO_ReadOutputPort(GPIOB) | (LL_GPIO_PIN_4));
}
if (TIMx == TIM2)
{
LL_GPIO_WriteOutputPort(GPIOB, LL_GPIO_ReadOutputPort(GPIOB) | (LL_GPIO_PIN_10));
}
}
}
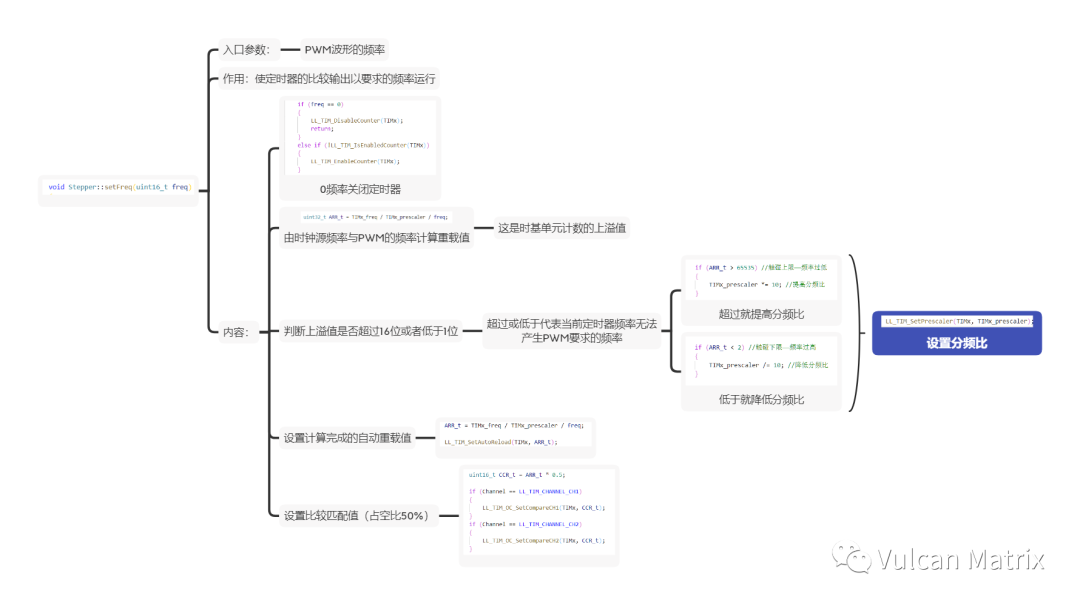
void Stepper::setFreq(uint16_t freq)
{
if (freq == 0)
{
LL_TIM_DisableCounter(TIMx);
return;
}
else if (!LL_TIM_IsEnabledCounter(TIMx))
{
LL_TIM_EnableCounter(TIMx);
}
uint32_t ARR_t = TIMx_freq / TIMx_prescaler / freq;
if (ARR_t > 65535) //触碰上限——频率过低
{
TIMx_prescaler *= 10; //提高分频比
}
if (ARR_t < 2) //触碰下限——频率过高
{
TIMx_prescaler /= 10; //降低分频比
}
LL_TIM_SetPrescaler(TIMx, TIMx_prescaler);
ARR_t = TIMx_freq / TIMx_prescaler / freq;
LL_TIM_SetAutoReload(TIMx, ARR_t);
uint16_t CCR_t = ARR_t * 0.5;
if (Channel == LL_TIM_CHANNEL_CH1)
{
LL_TIM_OC_SetCompareCH1(TIMx, CCR_t);
}
if (Channel == LL_TIM_CHANNEL_CH2)
{
LL_TIM_OC_SetCompareCH2(TIMx, CCR_t);
}
}
/**
* @brief 设置转速
*
* @param speed 转速-单位(度/秒)
*/
void Stepper::setSpeed(float speed)
{
//判断速度方向
DIRCTION _dir = POS;
if (speed != abs(speed))
{
_dir = INV;
speed = abs(speed);
}
setDirection(_dir);
//速度限幅
if (speed > 5000)
speed = 5000;
if (speed < 10)
speed = 10;
this- >speed = speed;
//将速度转化为定时器频率
uint16_t _freq = speed / 1.8;
setFreq(_freq);
}
float Stepper::getSpeed()
{
return speed;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
stm32的官方库函数有步进电机的那个脉冲函数吗?2024-07-23 515
-
stm32比较输出模式及用于步进电机控制2019-10-26 4111
-
Stepper电机驱动库有哪些问题?2021-07-08 879
-
Stepper库函数控制步进电机2021-09-07 1856
-
用步进电机驱动器驱动42步进电机2021-09-16 1600
-
STM32F429如何使用TIM4和TIM14 的PWM波驱动步进电机?2021-12-21 1185
-
PWM的两个比较模式是什么2022-02-16 747
-
STM8的PWM输出模式中PWM1和PWM2的区别是什么2022-03-02 1413
-
TIM—高级定时器输出PWM2023-03-08 1498
-
步进电机只抖动不转是什么问题?2023-11-10 2991
-
用一个开关手动控制步进电机的实现方法2009-04-29 1419
-
MSP430 Stepper Motor Controller电机控制:步进电机2017-10-12 1204
-
STM8TIM1配置2021-12-03 707
-
STM32驱动步进电机梯形算法库函数版2023-03-23 556
-
PWM输出控制电机2023-05-06 854
全部0条评论

快来发表一下你的评论吧 !
