

速锐得开发社区-新一代汽车网络通信技术CAN FD的特点归纳
电子说
描述
随着汽车工业的快速发展,汽车逐渐走向智能化,功能也越来越丰富,例如特斯拉、比亚迪、理想汽车为代表,在车载导航、驻车雷达、胎压监测、倒车影像、无钥匙启动、定速巡航、自动泊车、高级辅助驾驶系统、自动驾驶、域控制器、智能网关等都有新的特点。
为了提高竞争力,汽车制造商将越来越多的功能集成到汽车之中,我们的汽车就会变得交互性好、界面友好、智能化高级,这些功能的加入,增加了ECU(电子控制单元)的增加,进而使得总线负载急剧增加,传统的CAN总线(500K)每个数据帧最多携带8个字节数据的瓶颈逐步凸显,显得力不从心。
为了解决这一瓶颈,Bosch曾发布过新一代的汽车网络通信技术CAN FD,它不仅继承了高速CAN的主要特征,而且提高了CAN总线的通信效率,改善了错误帧漏检率,同时,还可以保持CAN-BUS系统不变,ECU厂家不需要大规模的改动就可以实现网络通信升级。
为此,速锐得整理了如下笔记,与公司内部开发、客户开发、数据采集、应用开发提供一些基础的帮助,我们就CAN FD的特点、难点,先做初步的学习与共同交流,后续我们会推出硬件设计及接口相关的,包括一些适用性代码等等。
1、CAN FD总线具备可变波特率,数据段最高可以达到15MBPS,传统标准CAN只有500K(最大1M),一个数据帧可以使用两种波特率进行传输,两种波特率有各自独立的为时间设置寄存器,这对硬件和解析都有要求,需要2个不同的寄存器,相互不干扰,CAN FD外设时钟频率为60MHz,硬件设计和软件代码需要谨慎,无论是仲裁段还是数据段,他们同步跳转宽度与缓冲段的值相同;
2、最大可以达到64字节,17位/21位 CRC算法,CANFD控制器需要根据数据长度不同选择不同的算法,数据越长,CRC算法越多;
3、CAN FD 有新的数据字节填充规则,采用差分信号传输数据,通信可靠性高,但是容易出现数据出错导致数据为被错误解析;
4、数据传输速率可以达到微秒级,与标准CAN不兼容,为此,芯片需要更换,解析方式也不同;
5、解析复杂,在CAN FD网络中,CAN和CAN FD可以同时存在,容易出现发送数据帧错误,导致整个CAN FD 网络通信瘫痪,或者报故障码。无论是标准帧还是扩展帧,只有确定是CAN帧还是CAN FD帧,才能知道当前的报文格式解析;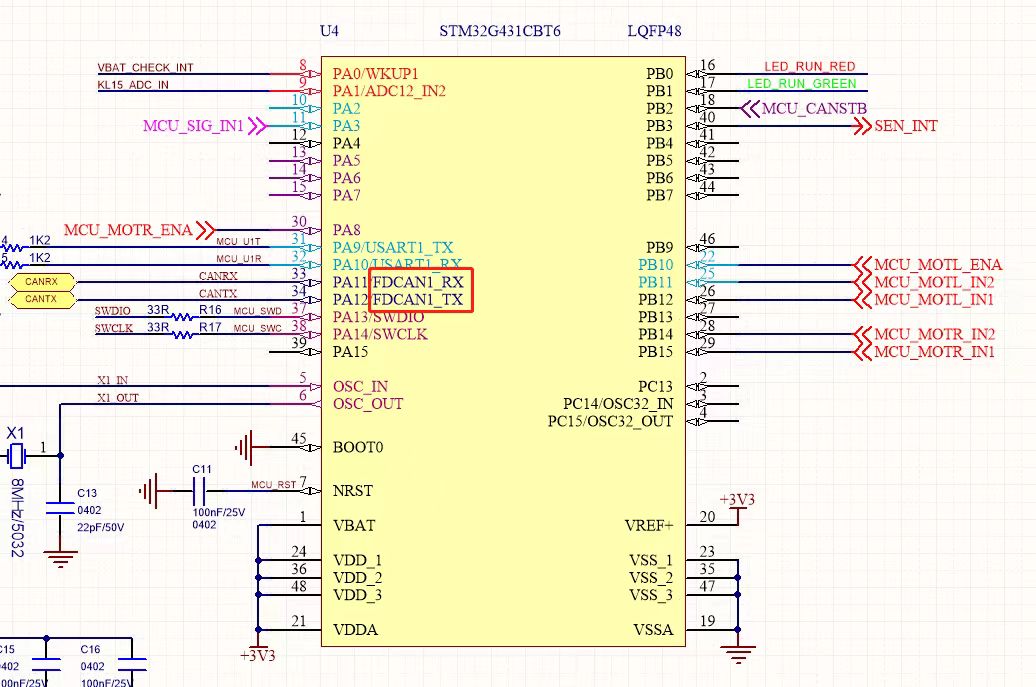
6、标准高速CAN升级到CAN FD需要做的工作:
a、虽然CAN FD继承了CAN的特性,但是也有一些工作要做:硬件需要支持CAN FD功能,从CAN芯片、晶振、寄存器、CAN收发器均需要学习控制器的学习方法,便于开发CAN FD应用,实现CAN FD跨平台的编程接口,实现CAN FD通信功能;
b、在开发过程中通常需要对网络进行调试和监测,推荐使用USBCANFD,将该接口卡的CAN FD接口连至CAN FD网络中,USB接口连接PC,开发者便可以轻松通过上位机监测CAN FD总线上的数据,同时,出于测试目的,还可以通过PC上位机向总线中发送数据;
c、如果传统CAN网络的部分节点需要升级到CAN FD,那么由于帧格式不同,CAN FD节点可以正常收发CAN节点报文,但是传统CAN节点不能收发CAN FD报文,会产生错误帧;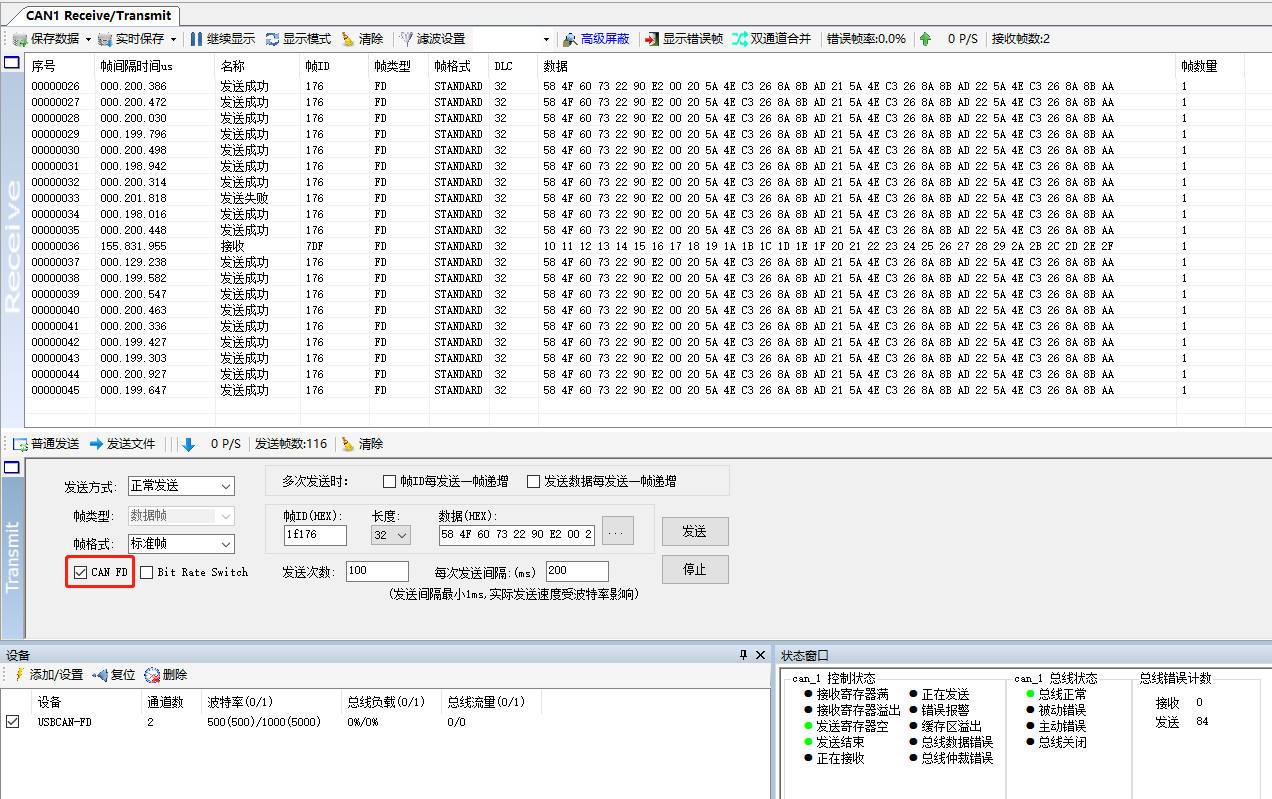
d、目前有速锐得的方案可以在原有网络拓扑不变的情况下,实现CAN与CAN FD的兼容,如硬件速锐得硬件设计显示:
(1)传统CAN使用具有CAN FD Shield模式的收发器,当收到CAN FD帧时,收发器会过滤改报文,以防止发送错误帧;
(2)使用CAN转CAN FD网关/网桥设备(例如EST558S-FD),将CAN FD报文按照用户设定的规则转换成传统的CAN报文。
审核编辑 黄宇
-
汽车网络安全 ISO/SAE 21434是什么?(一)2026-04-07 722
-
富士通先进的汽车网络技术2009-11-26 8205
-
汽车CAN总线系统原理、设计与应用2018-04-09 10847
-
速锐得解码福特汽车LIN总线结构及灯光控制功能开关原理2022-10-20 25009
-
一文浅析汽车CAN-FD总线的通信应用2023-02-14 1463
-
什么是汽车的网络通信系统2010-03-17 3533
-
结合内部CAN总线与外部网络通信协议的嵌入式系统开发2016-03-28 743
-
[原创] MicrochipCAN LIN CAN-FD汽车网络开发方案2018-05-19 3766
-
速锐得解码新款丰田大灯总成CAN矩阵拆解和结构分析2022-11-07 3648
-
速锐得解码特斯拉Model Y整车网关电路及CAN通信协议DBC控制策略2022-12-01 2637
-
汽车网络架构是什么意思2023-07-18 1843
-
基于CAN-FD的新一代汽车网络架构2023-09-19 1845
-
速锐得深入解析吉利几何CAN总线数据通信网络的拓扑层级框架技术2024-05-13 1918
-
Microchip汽车网络开发板:开启智能汽车网络开发新时代2026-06-04 273
全部0条评论

快来发表一下你的评论吧 !
