

自动控制原理中的根轨迹与PID介绍
控制/MCU
1933人已加入
描述
1
**
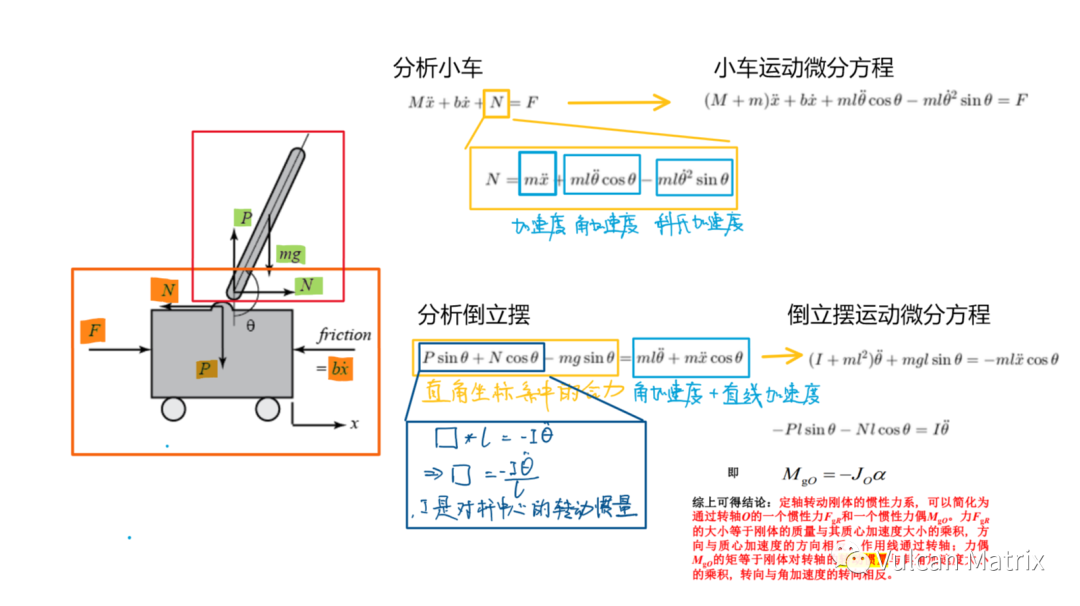
求平衡小车动力学模型
**
2
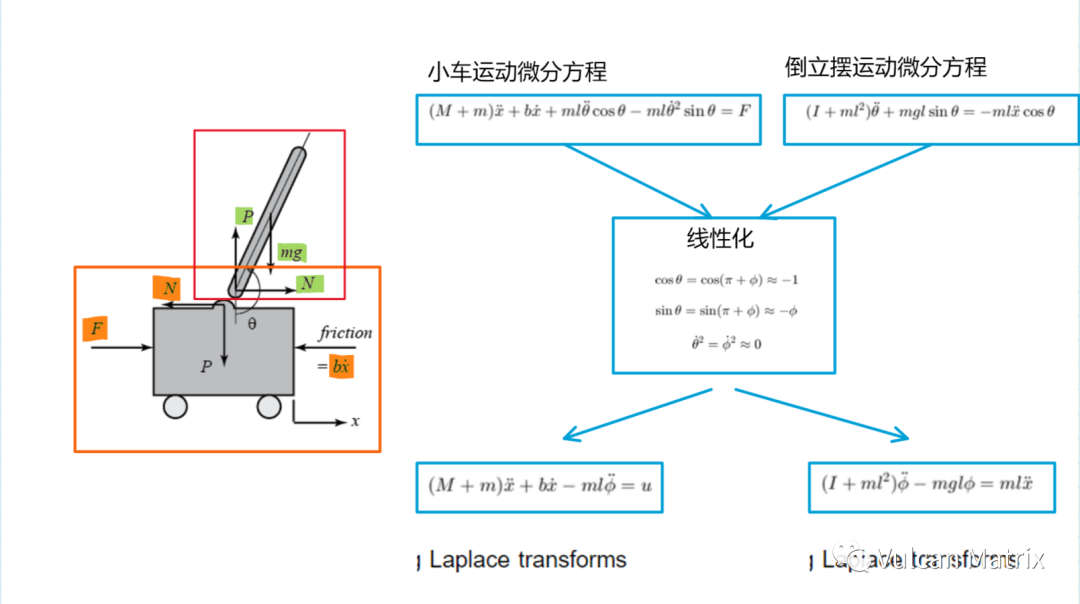
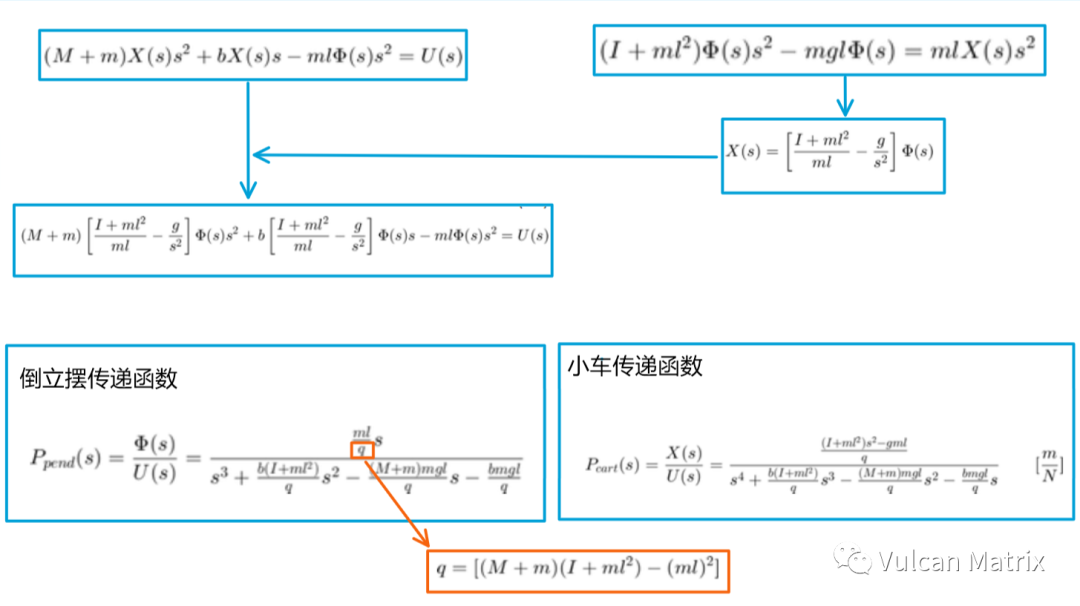
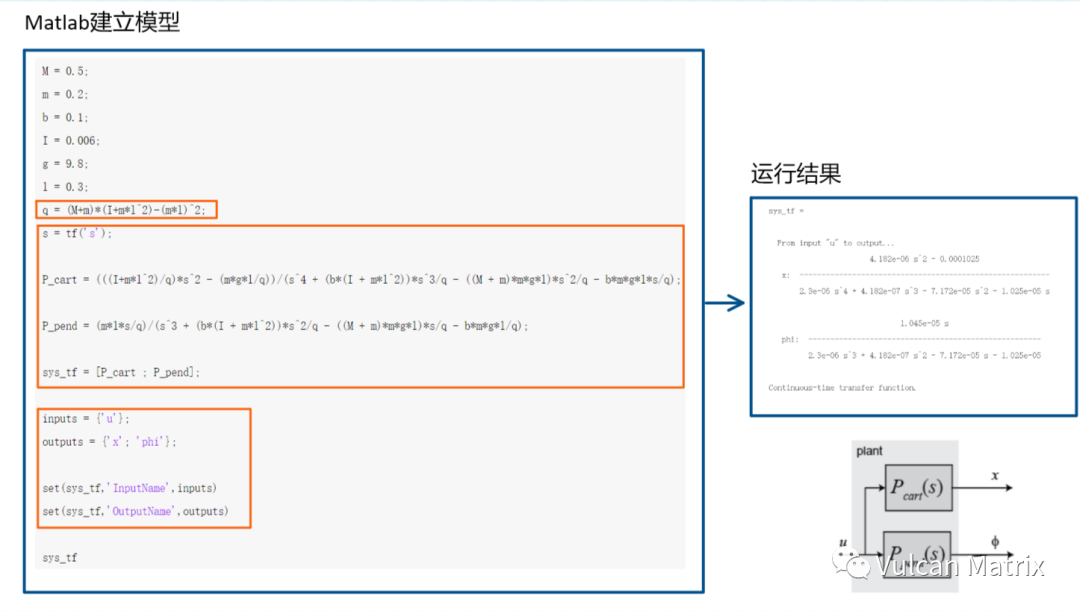
求系统传递函数
3
开环脉冲响应
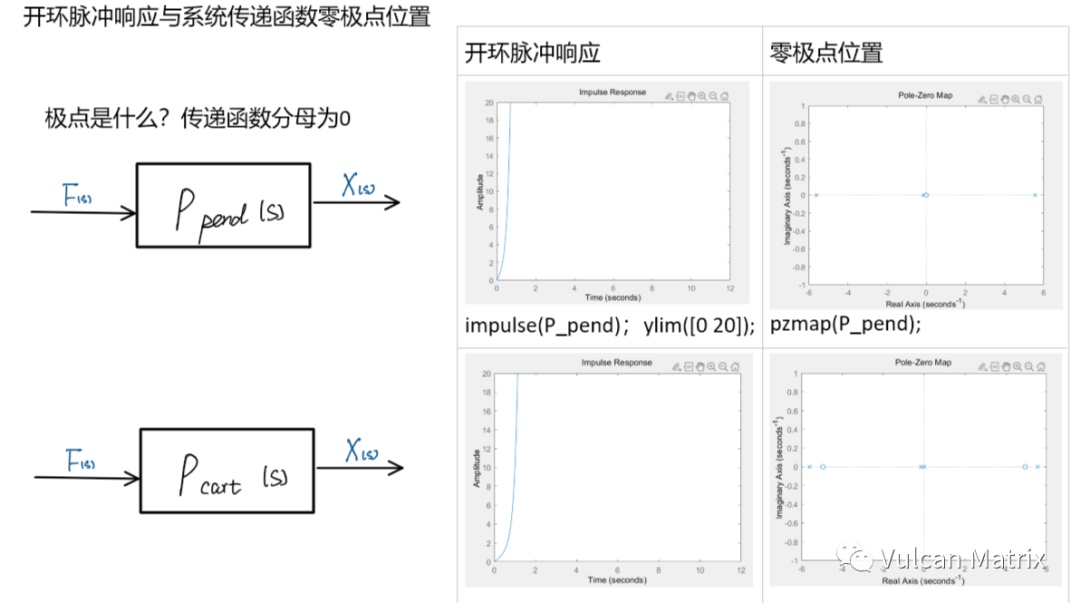
4
系统的闭环控制
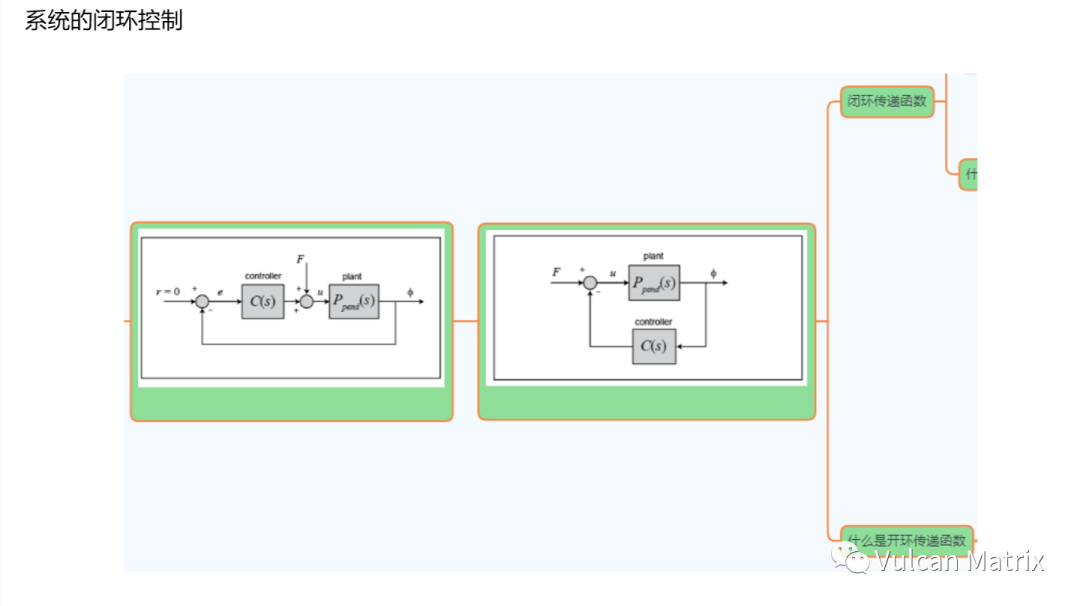
- 对倒立摆系统进行闭环控制,控制期望为摆保持0度
- 在倒立摆系统前接入控制器,构成新的(闭环)系统,有新的闭环传递函数
- 控制器以目标位置和摆位置的差值为输入,输出控制力
- 控制力与外部干扰力共同作用于倒立摆系统
- 由于控制期望始终为0,可以对控制框图进行简化,简化为右图形式
- 倒立摆系统闭环后形成新的传递函数——闭环传递函数
- 与闭环传递函数相似的概念为开环传递函数
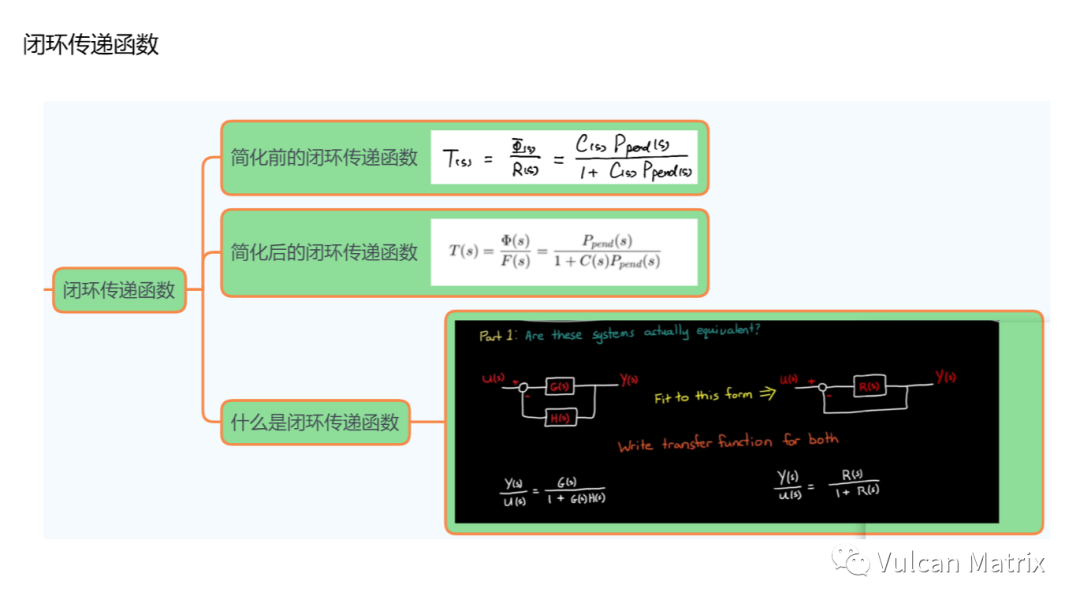
- 闭环传递函数是与闭环系统等价的一个传递函数
- 控制框图简化前,闭环传递函数为
- 简化后传递函数为
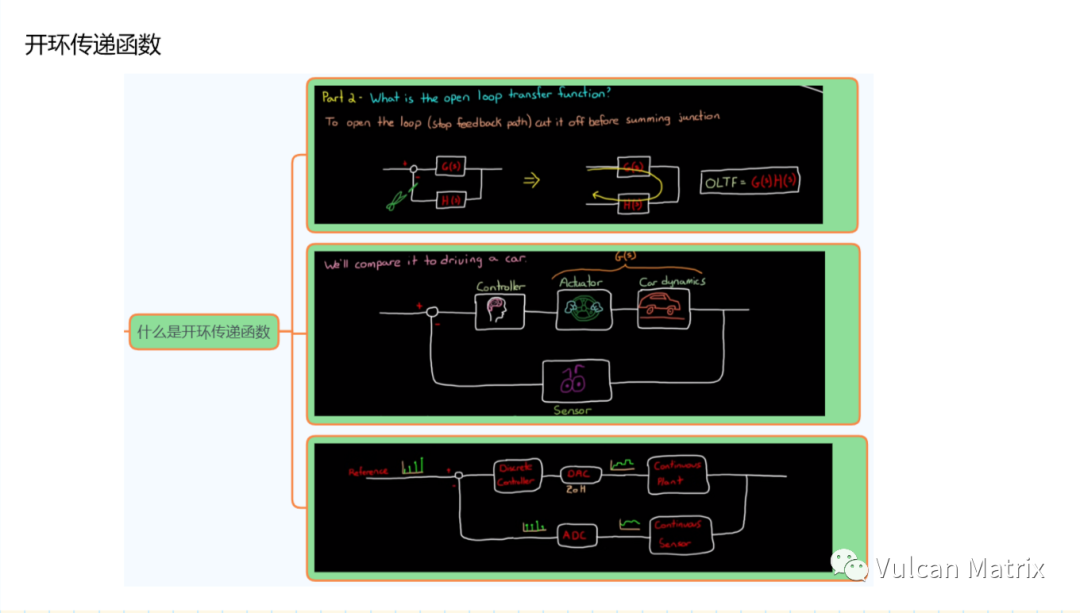
- 开环传递函数是断开闭环系统的主反馈通道后的传递函数
- 如第一张图,断开“主反馈回路”之后,OLTF=G(s)H(s)
- 第二张图是人驾驶车辆的道路上行驶的控制框图
- 借助这张图我们可以大致理解,开环传递函数反应了控制输入与反馈之间的关系
5
比例控制与根轨迹
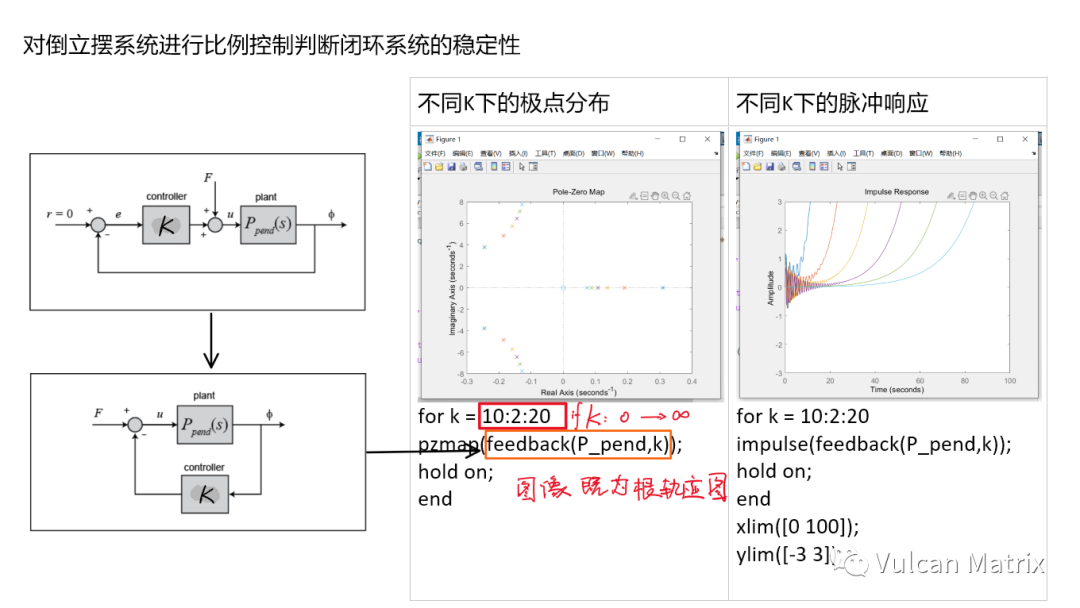
for k = 10:2:20
pzmap(feedback(P_pend,k));
hold on;
end
for k = 10:2:20
impulse(feedback(P_pend,k));
hold on;
end
xlim([0 100]);
ylim([-3 3]);
- 当我们的控制器为比例控制器时 C(s) = K(常数)
- 控制框图如图所示
- 也就是位置差越大我们用越大的力去推这个车
- 观察不同K下系统的脉冲响应
- 观察此时系统的极点分布,推断稳定性
- 右半平面的极点在不断向左半平面移动
- 会不会K在某个值时移动到左半平面
- 当K从0到无穷,极点的移动图像就是根轨迹
- 为什么叫根轨迹,不叫极点轨迹
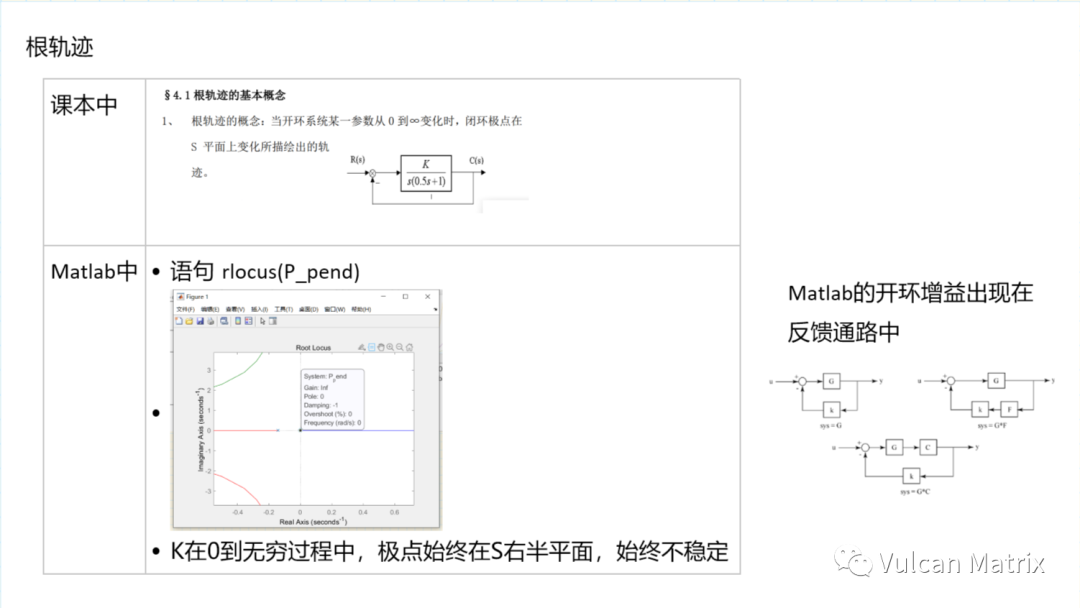
- 根轨迹的定义:
- 我们可以使用rlocus(P_pend)绘制根轨迹
- 使用help rlocus了解rlocus的使用
- 发现单纯的比例控制无法使倒立摆系统稳定
- 有没有方法能将根轨迹向平面右侧
- 这里有一个细节Matlab中的控制框图如图
- 其实两个的根轨迹相同,系统稳定性,性能相同
- 但是输出不同
- 有没有得到课本中根轨迹的方法?有,使用sisotool
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PID自动控制说明2021-04-21 1121
-
自动控制PID程序2019-04-23 1791
-
自动控制系统控制工程教程之根轨迹法的详细课件第二部分2018-11-22 1002
-
MATLAB 根轨迹的画法2016-11-25 4045
-
自动控制原理第四章_根轨迹分析法_Part3部分2016-09-02 825
-
基于MATLAB-GUI的用PID自动控制2016-06-17 784
-
求PID等自动控制算法2013-10-28 2903
-
自动控制原理课件下载2009-11-24 949
-
绘制根轨迹的MATLAB函数介绍2009-07-27 7714
-
自动控制原理-下载2009-01-08 772
全部0条评论

快来发表一下你的评论吧 !
