

VASS PLC控制机器人分析
描述
FB 201 FB_Rob_PN_A
FB 201机器人输入影像到DB块
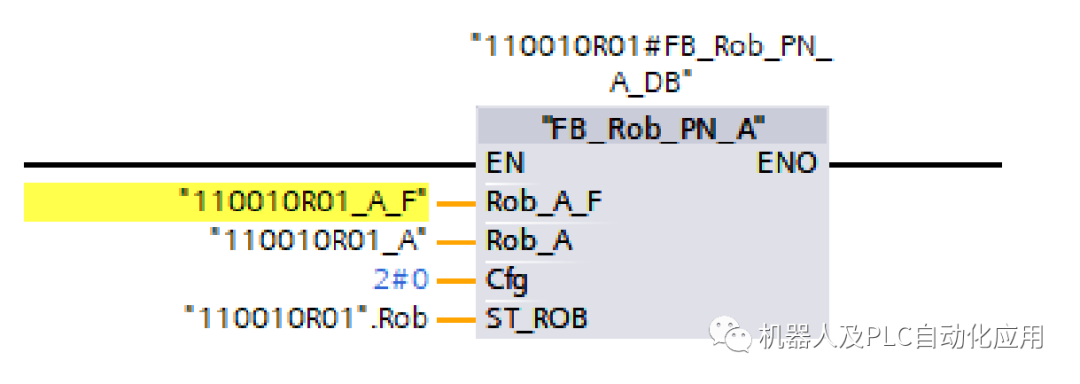
该模块将Robot的输出数据复制到Robot结构中。
该模块通常使用自己的实例数据模块进行访问。
实例数据模块的“符号名称”应如下所示:
xxxxxx Rxx#FB_Rob_PN_A_DB,例如110010R01#FB_Rob_PN_A_DB以下内容应在“符号注释”处注册:机器人输出.
该变量是机器人输出(SPS输入)的初始地址,模块将所有机器人输出数据写入机器人结构中。
FB 202 FB_Rob_PN_E
FB 201DB块输出机器人
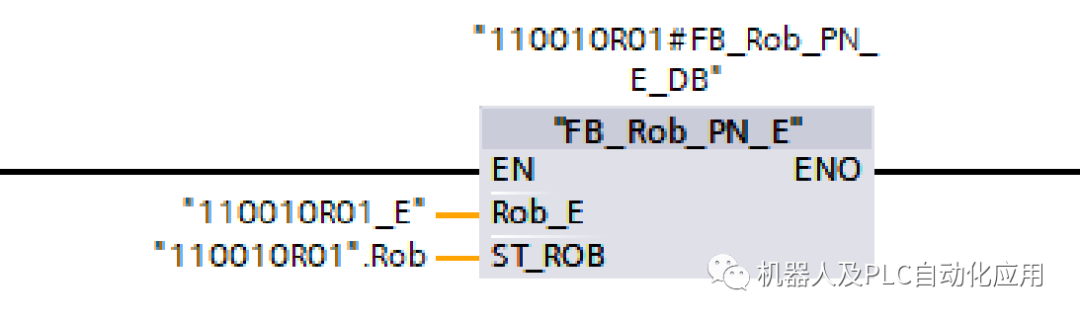
该模块将机器人结构的数据复制到机器人的输入数据区域。
该模块通常使用自己的实例数据模块进行访问。
实例数据模块的“符号名称”应如下所示:
xxxxxx Rxx#FB_Rob_PN_E_DB,例如110010R01#FB_Rob_PN_E_DB以下内容应在“符号注释”处注册:机器人输入
将鼠标指针移动到模块输入和输出上。通过这些链接,您可以立即跳转到文档的点,文档描述了这些输入和输出。
FB 203 FB_RobFolge_8
FB203 机器人程序号分配
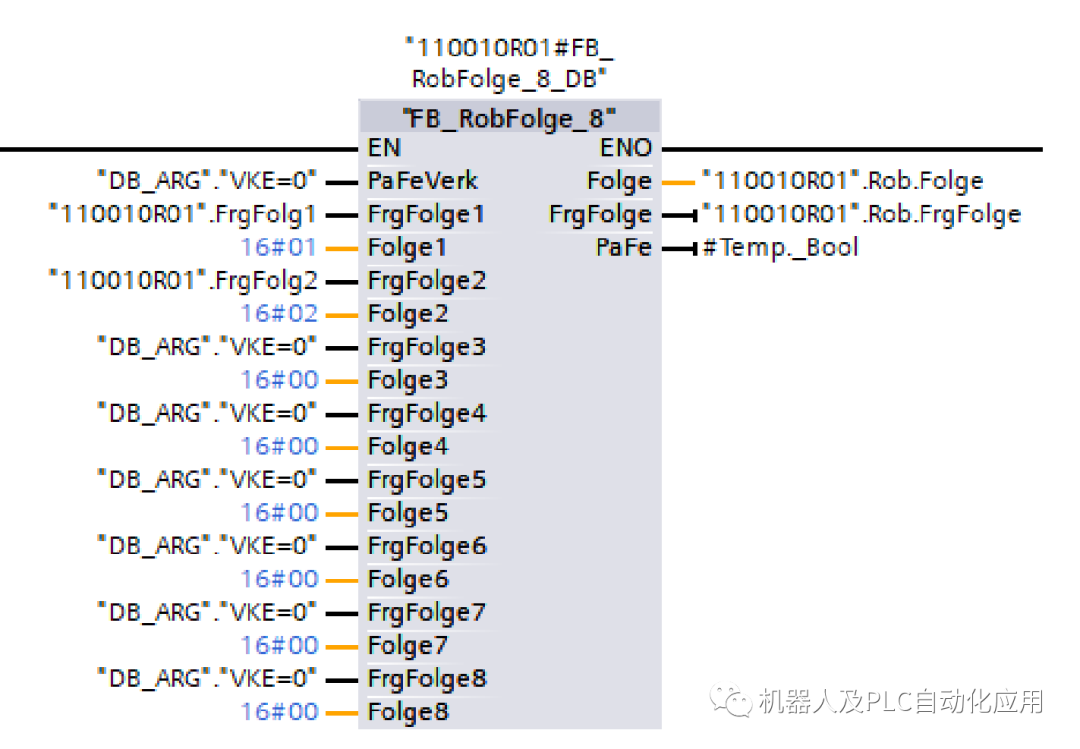 该模块根据可用的序列发布(“FrgSequence1”、“FrgSequence2”、…、“Frg Sequence8”),在模块输出“sequence”处发布相应的序列号(“Sequence1”,“Sequence2”、..、“Sequence8”。
该模块根据可用的序列发布(“FrgSequence1”、“FrgSequence2”、…、“Frg Sequence8”),在模块输出“sequence”处发布相应的序列号(“Sequence1”,“Sequence2”、..、“Sequence8”。
该模块通常使用自己的实例数据模块进行访问。
实例数据模块的“符号名称”应如下所示:
xxxxxx Ryy#FB_RobFolge_8_DB,例如110010R01#FB_RobFolge_8-DB以下内容应在“符号注释”处注册:机器人序列选择
通过级联15个序列而不是仅8个序列可以被参数化。使用模块“FB_RobFolge_16”,可以在不级联的情况下对16个序列进行参数化。
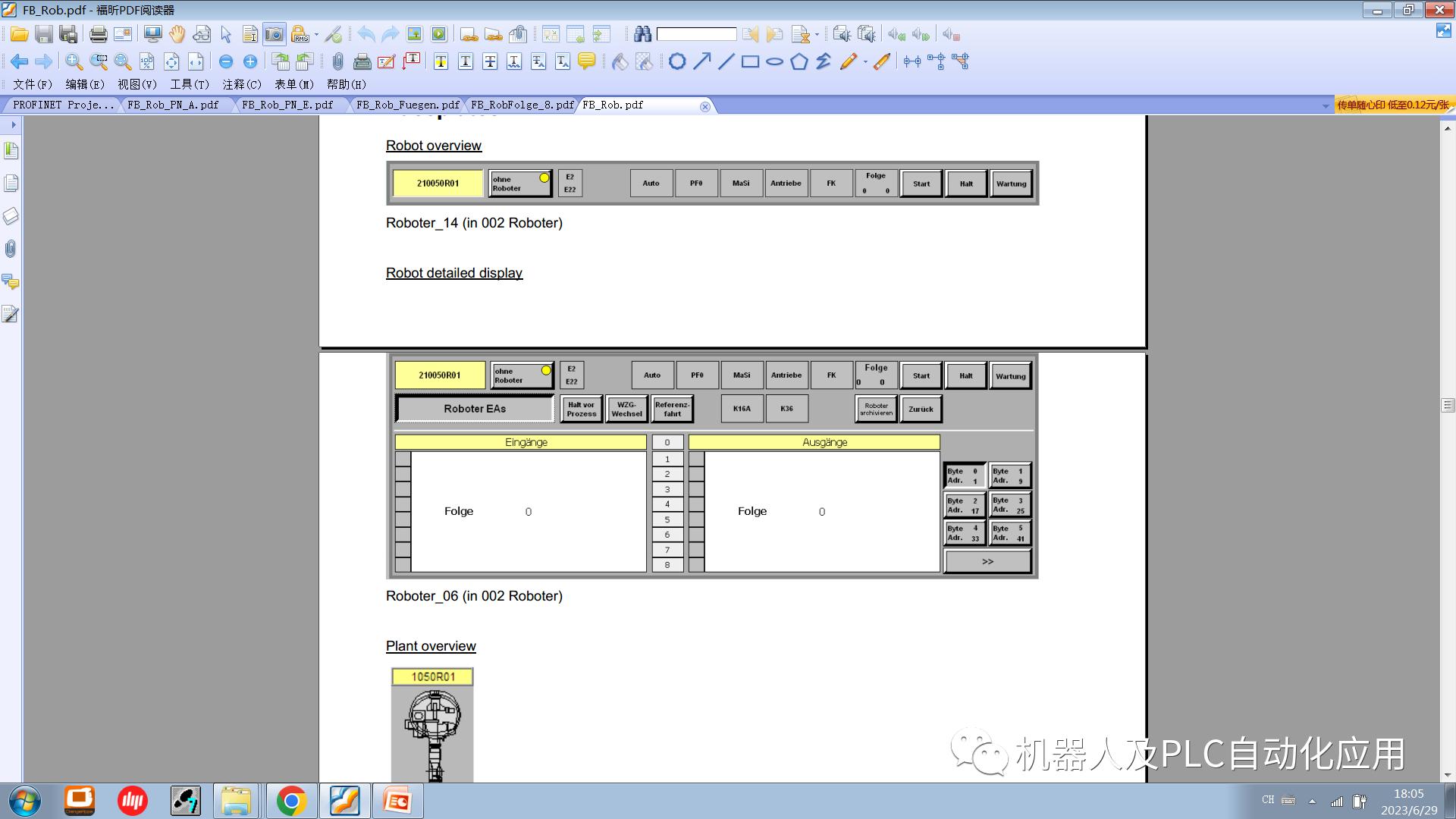
FB 200 FB_Rob
FB200 机器人逻辑控制
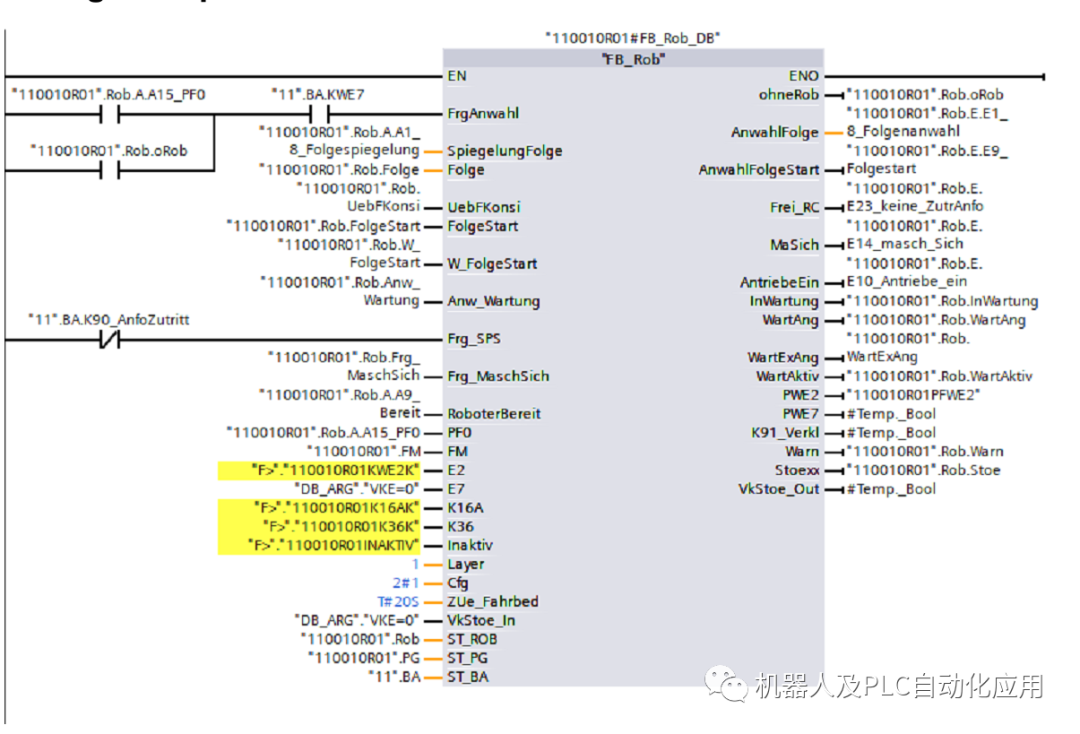
这个块用于控制机器人的运动。
此块通常使用专用实例数据块进行访问。
实例数据块的“符号名称”必须显示如下:
xxxxxx Ryy#FB_Rob_DB,例如110010R01#FB_Rob_DB以下内容应在“符号注释”处注册:Roboter
块体结构
过程控制(“过程前停止”)
暂停机器人(“PLC行程启用”)
将机器人移至维修位置
启动顺序(系统处于自动启用模式K26)
机械安全启用/序列一致性检查
机器人驱动连接
机器人按顺序输出
报警系统
启动顺序(系统处于自动启用模式K26)
机器人在工厂自动启用模式(K26)下的顺序启动(E9)需要以下信号状态:
块输入“Folge”处的序列号不得等于0。
如果未选择维护位置(块输出“WartAng”=False),则块输入“FolgeStart”必须为True。
如果选择了维护位置,则块输入“W_FolgeStart”必须为True(块输出“WartAng”=True)。
机器人必须“准备就绪”(A9_Bereit=True)。
机器人必须位于0点(A15_PF0=真)。
来自机器人的外部紧急停止反馈(块输入“K16A”)必须为True。
来自机器人的操作员保护/安全电路反馈(块输入“K36”)必须为True。
机器人必须输出“执行器启用”(A10_FRG_Stellglieder=True)。
机器人必须处于自动模式(A12_Automatik=True)。
机器人不得处于最后一点(A14_LPKT=错误)。
工厂或模式区域必须处于自动启用模式(K26_FrAuto=True)。
不得取消选择机器人(ohneRob=False)。
所选序列(E1_8_Folgennwahl)必须与序列镜像(A1_8_Folgespiegelung)相对应。
机器人驱动器必须打开(E10_Antriebe_ein=True)。
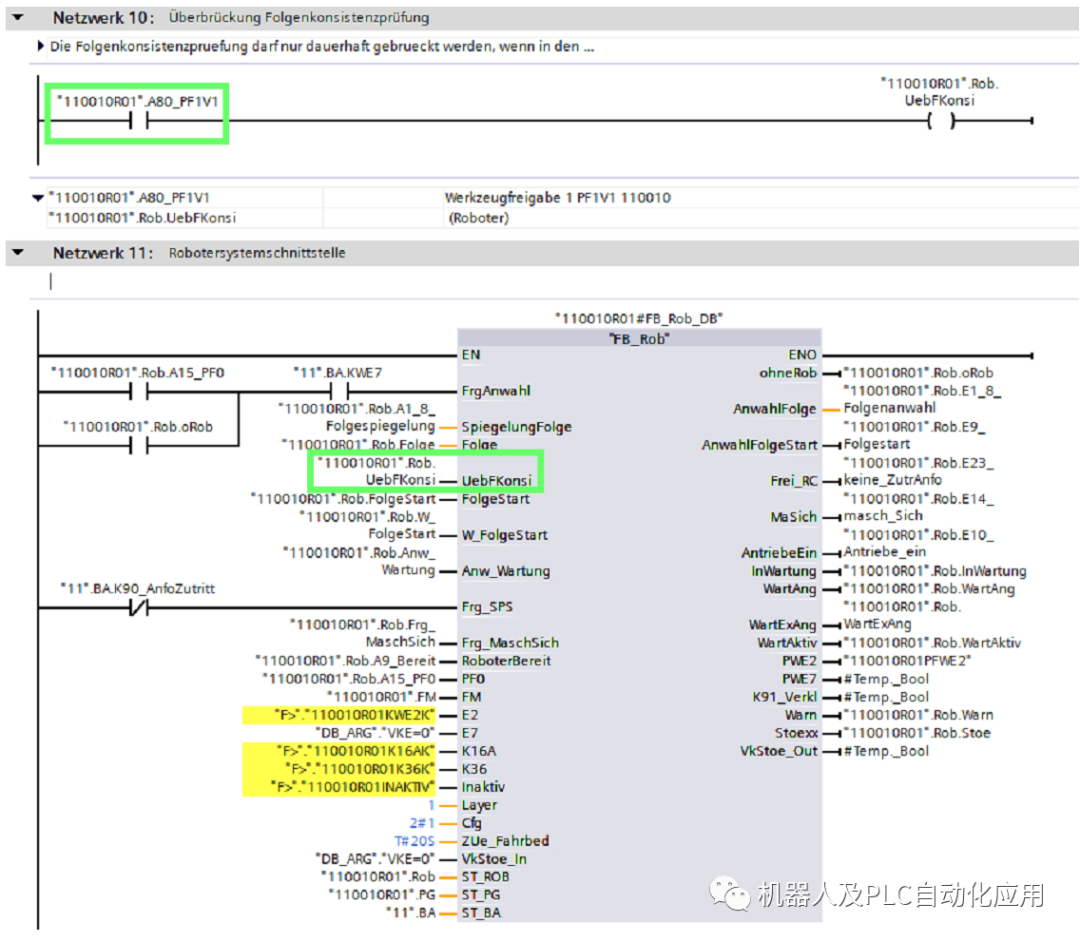
机械安全启用/序列一致性检查
检测到序列不一致或缺少“机械安全启用”(块输入“Frg_MaschSich”)将清除“机械安全”(E14)并暂停机器人。
序列不一致检测必须满足以下条件:
序列镜像(“SpiegelungFolge”)必须<>0、<>基本位置序列和<>维护序列
序列一致性检查覆盖(“UebFKonsi”)必须为FALSE,并且机器人不得处于“PF0”中
块输入“Folge”处的序列必须<>0且<>序列镜像(“SpiegelungFolge”)
特殊情况:
序列一致性检查不会被“VKE=1”覆盖。
需要为焊接机器人和搬运机器人编程序列一致性检查超控(符合工厂布局)。
如果机器人没有在相应的工具中工作,则工具启用(例如PF1V1)会覆盖序列一致性检查。
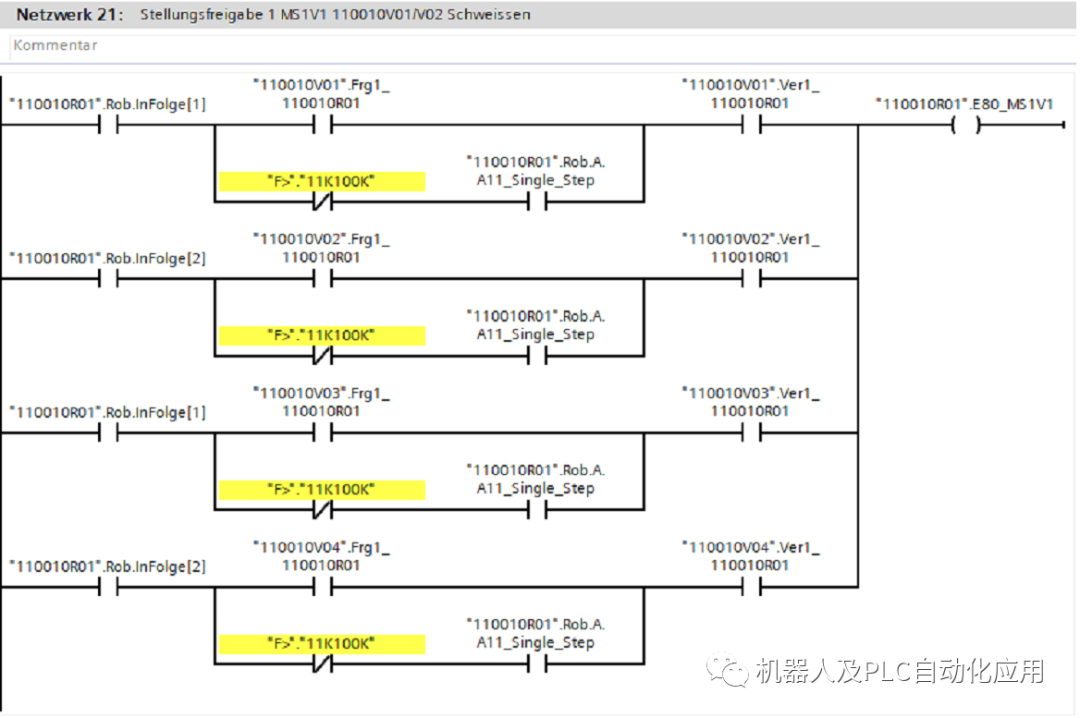
如果夹持器不可能/不足以绕过无轮廓,则必须将来自机器人(InFolge)的顺序反馈编程为相应工位的位置启用(例如MS1V1)。
机器人驱动连接
机器人驱动器(E10)在以下条件下打开:
设备或模式区域处于自动启用模式(K26_FrAuto=True),或者设备或模式区处于手动启用模式(K2 5_FrHand),并且“启动”按钮被激活。
机器人必须位于点0(A15_PF0=True)或路径上(A16_SAK=True)。
机器人必须“准备就绪”(A9_Bereit=True)。
机器人必须输出“执行器启用”(A10_FRG_Stellglieder=True)。
机器人必须处于自动模式(A12_Automatik=True)。
来自机器人的外部紧急停止反馈(块输入“K16A”)必须为True。
来自机器人的操作员保护/安全电路反馈(块输入“K36”)必须为True。
不得取消选择机器人('hneRob'=False)。
机器人按顺序输出
在机器人结构中,每个序列号(1-125)都有一个位(BOOL),只有当机器人在相应的序列中时才会设置。
ST_ROB.InFolge[1]
。。。
。。。
ST_ROB.InFolge[125]
例如,如果机器人镜像序列10(A1_8_Folgespiegelung=10),则1050R01.InFolge[10]位变为True。所有其他位均为False。
例如,这些位现在可以用于旅行启用,因此机器人只有在正确的顺序下才能继续旅行。
序列重复
与负责的规划者协商后,可以使用Cfg.X2=True激活时间优化序列处理。当序列开始挂起并且具有正确的序列镜像时,可以通过E22_Frg_Folgenwieder输入从序列结束跳到序列开始。执行跳转时,输出A22_Folgenwiederh_aktiv变为True。有关此功能的编程,请参阅机器人编程说明。
编程顺序重复:
(*********************)
(*序列重复*)
(*********************)
ST_ROB.E22_Frg_Folgenwiederh := FolgeStart And (Folge = SpiegelungFolge) And Not PF0 And Not Anw_Wartung And Cfg.X2;

FB 250 FB_Rob_Greifer 机器人抓手控制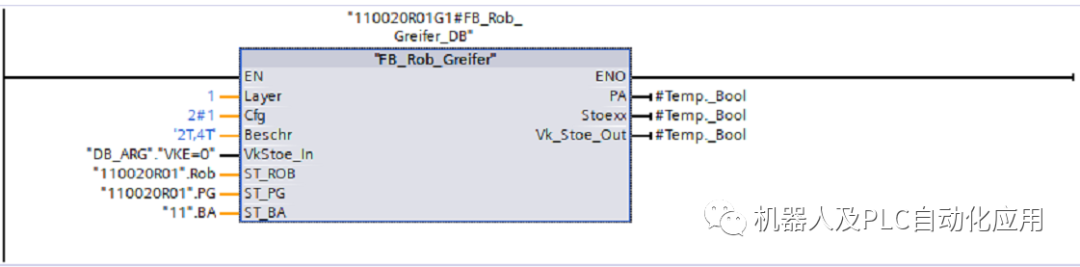
此块用于夹具的维护选择。
此块通常使用专用实例数据块进行访问。
维修位置选择
可通过“维护”按钮(切换功能)选择/确认维护位置。
当到达维护位置时,文本从“维护”变为“维护确认”。
将特定的夹持器发送到维护位置
在选择维护位置之前,必须选择要移动到维护位置的夹持器。然后必须使用维护按钮选择维护位置。然后,机器人带着夹具移动到维护位置。
显示哪个夹持器处于维护位置
当机器人处于维护位置时,机器人告诉PLC当前正在维护的夹具。此状态由“Gripper1/5”、“Gripper2/6”、“Gripper3/7”或“Gripper4/8”中的颜色变化指示。

| 输入说明 | 输出说明 | |
| E/A 113 | 维护时选择多个夹具 5 | 过程处于活跃状态 |
| E/A 114 | 维护时选择多个夹具 6 | 挤夹指示器 |
| E/A 115 | 维护时选择多个夹具 7 | 对接系统故障 |
| E/A 116 | 维护时选择多个夹具 8 | 过程处于活跃状态 |
| E/A 117 | Res | KS 电机/末位位置误差 |
| E/A 118 | Res | KF 电机/起动器错误 |
| E/A 119 | Res | 短路焊接误差 |
| E/A 120 | Res | 组故障 |
| E/A 121 | 维护时选择多个夹具 1 | 过程处于活跃状态 |
| E/A 122 | 维护时选择多个夹具 2 | 挤夹指示器 |
| E/A 123 | 维护时选择多个夹具 3 | 零件控制误差 |
| E/A 124 | 维护时选择多个夹具 4 | 检查运行中传感器的误差 |
| E/A 125 | 保留 | 组故障 |
| E/A 126 | 保留 | 保留 |
| E/A 127 | 机器人 XY 的在线使能 1 | 用于机器人 XY 的在线使能 1 |
| E/A 128 | 机器人 XY 在线使用 2 | 用于机器人 XY 的在线使能 2 |
-
机器人控制入门2012-08-15 3852
-
如何远程控制机器人?2014-10-25 5055
-
什么是工业机器人2015-01-19 6815
-
关节机器人控制2015-04-29 5467
-
先进机器人控制2017-09-19 4596
-
机器人基础书籍2019-05-22 3653
-
机器人系统与控制需求简介2021-09-08 2344
-
机器人的控制系统2021-09-13 1966
-
什么是机器人控制系统2021-10-11 3644
-
机器人是什么?2022-03-31 22299
-
PLC控制/监控机器人抓手故障的编写2022-03-11 2477
-
VASS 标准机器人的附加功能2023-06-27 1674
-
PLC与机器人控制器的关系2023-07-10 4045
-
PLC对机器人的互锁信号控制2023-12-12 3319
-
如何使用PLC控制机器人2024-06-17 5730
全部0条评论

快来发表一下你的评论吧 !
