

如何使用Arduino制作无线机械臂?
描述
这种机械臂电路也可以像机器人起重机一样实现,使用 6 个伺服电机工作,并且可以通过微控制器遥控器使用基于 Arduino 的 2.4 GHz通信链路进行控制。
主要特点
当你建造像机械臂这样复杂的东西时,它必须看起来很现代,必须包含许多高级功能,而不仅仅是玩具般的功能。
所提出的成熟设计相对容易构建,但它具有一些先进的机动功能,可以通过无线或远程控制命令进行精确控制。如果电机经过适当升级,该设计甚至可以与工业用途兼容。
这种机械起重机像机械臂的主要特点是:
在垂直轴上连续调节的“臂”。
在 180 度垂直轴上连续可调“弯头”。
连续可调的“手指捏合”或在 90 度垂直轴上抓握。
在 180 度水平面上连续可调的“臂”。
整个机器人系统或起重机臂可以像遥控车一样移动和操纵。
电机机构位置
下图为我们提供了有关实施项目需要安装的各种电机位置和相关齿轮机构的清晰图片:
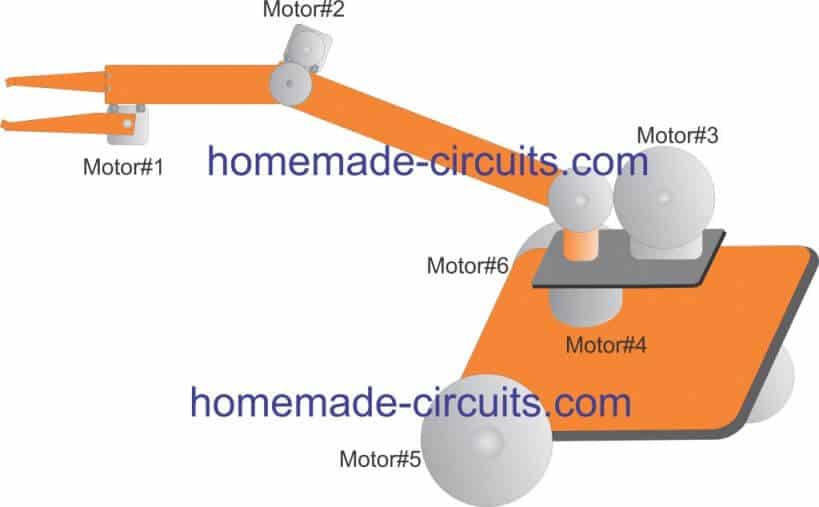
在此设计中,我们确保使事情尽可能简单,以便即使是外行也能够理解所涉及的电机/齿轮机构。复杂机制背后没有任何东西隐藏。
借助以下几点可以了解每个电机的工作或功能:
电机#1控制机器人的“手指捏合”或抓取系统。可移动元件直接与电机轴铰接以进行运动。
电机#2控制系统的弯头机构。它配置了一个简单的边缘到齿轮系统,用于实现提升运动。
电机#3负责垂直提升整个机械臂系统,因此该电机需要比上述两个更强大。该电机还集成了齿轮机构,以提供所需的动作。
电机#4在整个360度水平面上控制整个起重机机构,因此手臂能够在全顺时针或逆时针径向范围内拾取或提升任何物体。
电机#5和6就像承载整个系统的平台的轮子。这些电机可以通过毫不费力地将系统从一个地方移动到另一个地方来控制,并且只需调整左/右电机的速度,它还有助于系统的东西、北/南移动。这可以通过减少或停止两个电机中的一个来完成,例如启动右侧转弯,右侧电机可以停止或停止,直到转弯完全执行或达到所需角度。同样,对于启动左转,对左电机执行相同的操作。
后轮没有任何与之相关的电机,它是铰接的,可以在其中心轴上自由移动并跟随前纵。
无线接收器电路
由于整个系统设计为与遥控器配合使用,因此需要为无线接收器配置上述电机。这可以使用以下基于Arduino的电路来完成。

如您所见,有 6 个伺服电机与 Arduino 输出相连,每个电机都通过附加传感器 NRF24L01 捕获的遥控信号进行控制。
信号由该传感器处理并馈送到Arduino,Arduino将处理结果传送到相关电机以进行预期的速度控制操作。
信号从具有电位计的发射器电路发送。这些电位器上的调节器控制与上述接收器电路相连的腐蚀电机的速度水平。
现在让我们看看发射器电路是什么样的:
变送器模块

可以看到发射器设计有6个电位计连接到其Arduino板,以及另一个2.4 GHz通信链路设备。
每个电位器都经过编程,用于控制与接收器电路相关的相应电机。因此,当用户旋转变送器选定电位器的轴时,机械臂的相应电机开始移动并根据其在系统上的特定位置执行动作。
控制电机过载
您可能想知道电机如何限制其在其可移动范围内的运动,因为系统没有任何限制装置来防止电机在各自的机构运动达到终点时过载?
例如,如果电机在“抓地力”紧紧握住物体后仍未停止,会发生什么?
最简单的解决方案是为每个电机添加单独的电流控制模块,以便在这种情况下电机保持打开和锁定,而不会燃烧或过载。
由于有源电流控制,电机不会经历过载或过流情况,并且它们在指定的安全范围内保持运行。
-
碳纤维材质制作的机械臂有什么特别之处2020-04-24 2830
-
【资料推荐】基于Arduino的PS2机械臂遥控小车(L298N)傻瓜教程2021-06-29 1701
-
怎么实现基于Arduino的PS2机械臂遥控小车的设计?2021-10-19 2258
-
工业机械臂的相关资料推荐2021-11-29 1858
-
如何通过arduino单片机和机械臂零件设计一个手柄操控自学习机械臂模型?2022-01-24 1696
-
用纸板制作液压机械臂2019-01-16 18248
-
简易Arduino机械臂DIY图解2019-10-09 17109
-
工业机械臂2021-11-19 1676
-
机械臂制作案例2022-10-28 781
-
基于Arduino UNO的可编程机械臂2022-12-22 748
-
无线机械臂开源硬件2022-12-27 898
-
如何用Arduino制作遥控机械手2023-01-31 1363
-
如何制作机械臂2023-02-08 885
-
使用Arm link软件控制Arduino机械臂2023-06-19 1449
-
机械臂:Arduino + Matlab2023-06-28 936
全部0条评论

快来发表一下你的评论吧 !
