

模糊控制在汽车伺服控制系统中有哪些应用
工业控制
描述
传统PID(比例、积分和微分)控制原理简单,使用方便,适应性强,可以广泛应用于各种工业过程控制领域。但是PID控制器也存在参数调节需要一定过程,最优参数选取比较麻烦的缺点,对一些系统参数会变化的过程,PID控制就无法有效地对系统进行在线控制。不能满足在系统参数发生变化时PID参数随之发生相应改变的要求,严重的影响了控制效果。
模糊控制技术,已经成为智能控制技术的一个重要分支,它是一种高级算法策略和新颖的技术。自从1974年英国的马丹尼(E.H.Mandani)工程师首先根据模糊集合理论组成的模糊控制器用于蒸汽发动机的控制以后,在其发展历程的30多年中,模糊控制技术得到了广泛而快速的发展。
现在,模糊控制已广泛地应用于冶金与化工过程控制、工业自动化、家用电器智能化、仪器仪表自动化、计算机及电子技术应用等领域。尤其在交通路口控制、机器人、机械手控制、航天飞行控制、汽车控制、电梯控制、核反应堆及家用电器控制等方面,表现其很强的应用价值。
并且目前已有了专用的模糊芯片和模糊计算机的产品,可供选用。我国对模糊控制器开始研究是在1979年,并且已经在模糊控制器的定义、性能、算法、鲁棒性、电路实现方法、稳定性、规则自调整等方面取得了大量的成果。著名科学家钱学森指出,模糊数学理论及其应用,关系到我国二十一世纪的国力和命运。
所谓模糊PID控制器,即利用模糊逻辑算法并根据一定的模糊规则对PID控制的比例、积分、微分系数进行实时优化,以达到较为理想的控制效果。
模糊PID控制共包括参数模糊化、模糊规则推理、参数解模糊、PID控制器等几个重要组成部分。计算机根据所设定的输入和反馈信号,计算实际位置和理论位置的偏差e以及当前的偏差变化ec,并根据模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出PID控制器的比例、积分、微分系数。
卫星信号接收最大的难点是天线如何自动跟踪卫星信号,尤其是舰船位置(经、纬度)和方向(方位角)。
为接收卫星信号,在舰船移动接收平台上装载可由电机控制旋转的卫星接收天线系统,将测量出的卫星电视接收天线方向的变化数据转换成驱动指令,经伺服驱动系统控制天线转动,使接收天线中心轴在载体移动过程中始终对准卫星,并且采取适当方法对长时间行驶产生的累积误差进行修正。
故针对舰船航行过程中,因受各种作用力对船只的影响,卫星天线接收器的基座发生偏移,导致天线接收器不再指向卫星信号的传输方向,信号接收变弱甚至中断,通过从轮船卫星天线陀螺传感器和电子罗盘得到的数据,对改变的接收器指向坐标进行推算验证,得到天线指向的初始坐标的坐标值转换公式。利用电机伺服驱动系统控制天线左右或上下转动,重新调整使其指向卫星,接收信号。
/ 车载天线伺服系统的组成 /
车载天线系统由两部分组成:户外设备和户内设备。户外设备主要是天线伺服跟踪系统(包括平台、平台伺服跟踪系统、惯性传感器、GPS、卫星天线等);户内设备主要是控制器(包括各传感器接口、数据采集、控制器、卫星接收机等)和主控计算机,两者之间采用电缆连接,具有稳定跟踪和接收卫星信号的两大功能。
本系统采用德州仪器推出的TMS320LF2407A,与传统的单片机相比有巨大的优势。只需外加较少的硬件即可实现电机控制系统。本系统采用增量式光电码盘反馈转子的速度和磁极位置及初始位置。车载天线伺服系统模糊PID控制框图如图1所示。
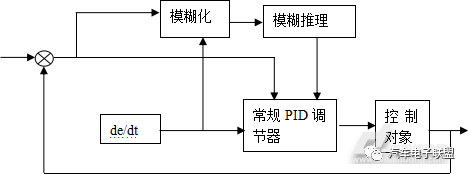
图1 车载天线伺服系统模糊PID控制框图
车载天线伺服系统数学模型的确定
若电机的负载为常数且只输出电机转动的角速度,则得到直流伺服电机的传递函数如式(1)。
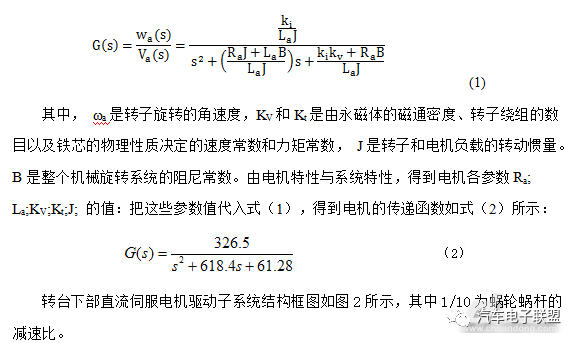
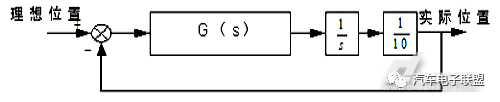
图2 直流伺服电机驱动子系统结构框图
/ 模糊PID控制器的设计 /
PID参数的模糊自整定是找出PID三个参数Kp、Ki、Kd与e和ec之间的模糊关系,在运行中通过不断的监测e和ec,根据模糊控制原理对三个参数进行在线的整定。
PID参数的设定是靠经验及工艺的熟悉,参考测量值与设定值曲线,从而调整Kp、Ki和Kd的大小。模糊控制规则是用于修正PID参数的,模糊控制规则根据过程的阶跃响应情况来考虑求取。
规则如下所示:
(1)预选择一个足够短的采样周期让系统工作;
(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期﹔
(3)根据下面的具体规则修改PID控制器参数,直至满意为止。

根据上面所述的模糊控制规则,采用如下的PID参数的调节规则,如表1、表2、表3所示。
表1Kp规则调节表
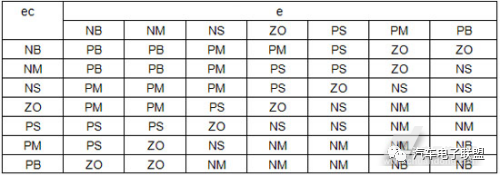
表2KI规则调节表

表3KD规则调节表
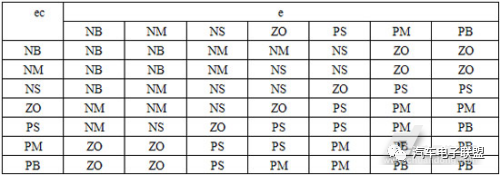
PID三个参数的模糊规则库建立好以后,就可以根据模糊控制理论进行参数的自调整。将系统误差e和误差变化率ec变化范围定义为模糊上的论域:
e,ec={-3,-2,-1,0,1,2,3}
在模糊控制规律中,e和ec的语言变量值取“负大”(NB),“负中”(NM),“负小”(NS),“零”(ZO),“正小”(PS),“正中”(PM),“正大”(PB)共7个值。它们的隶属度函数都是三角形,并且,每个值所取的范围宽度相等。
为了验证PID模糊控制器的控制效果,用Matlab/Simulink软件进行仿真,根据系统的数学模型。
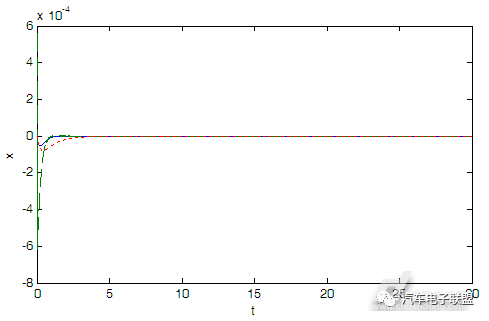
图3 仿真曲线图
运行仿真程序塑料工业网,得到如图3所示的仿真结果。从图中可以知道,在阶跃响应下,与传统PID相比,该系统的上升时间和调节时间大大缩小,超调量明显减小,大大提高了系统的动态性能。
/ 结论 /
本论文将模糊控制与SIMULINK相结合,对车载伺服系统设计了一个比较合理的模糊PID控制器并且进行MATLAB仿真。
由于车载天线处于一个实时变化的环境,导致系统参数可能会根据环境变化。传统的固定控制参数的控制策略没有办法满足这样的需求,而模糊自适应控制却恰好弥补这一缺陷。
同时模糊自适应控制还很好地解决了伺服系统本身自带的由于惯量引起的误差。软硬件结合真正满足了系统的快,准,稳。
-
基于单片机的汽车模糊控制系统的程序谁有啊2015-03-16 2058
-
求模糊控制在labview中的应用???2015-04-01 2492
-
比值控制在DCS控制系统中的应用2009-04-07 835
-
模糊PID 控制在工业锅炉控制系统中的应用2009-05-25 703
-
灰色模糊控制在电机控制系统中的应用2009-06-29 578
-
基于模糊PID控制的交流伺服系统2009-09-12 997
-
感应电机转矩控制系统中的模糊控制2010-12-24 896
-
模糊控制在基于CAN总线的数据采集与控制系统中的应用2009-10-25 970
-
微机模糊控制在TIG逆变电源中设计2010-05-16 1059
-
基于LabVIEW的直流伺服电机模糊PID控制系统2016-04-05 1519
-
自整定模糊PID控制在电机控制系统中的应用2016-04-06 1241
-
基于Matlab和模糊PID的汽车巡航控制系统设计_仇成群2017-02-08 983
-
基于模糊-PI双模速度控制系统设计2017-11-05 942
-
PID控制在交流位置伺服系统中的应用2018-02-08 4403
-
模糊控制在智能小车方向控制中的应用2022-03-11 1045
全部0条评论

快来发表一下你的评论吧 !
