

控制模块PCB布局布线设计
PCB设计
2586人已加入
描述
首先我们需要将元器件摆放在相应的位置上,同样的原则,将同一模块的中的元器件摆放在一起,如下图将ASM1117和其相关的元器件摆放在一起:
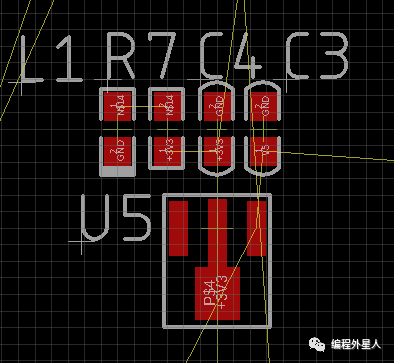
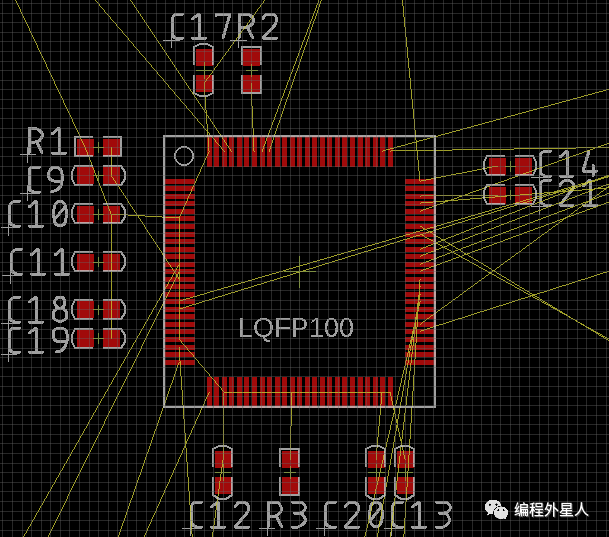
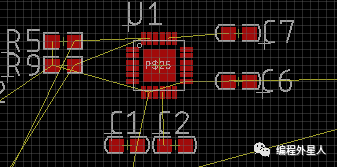
之后,我们将Cortex-M4处理器,也就是我们选用的STM32F407VET6的电源电容与其摆放在一起,电容尽量靠近芯片的电源引脚:
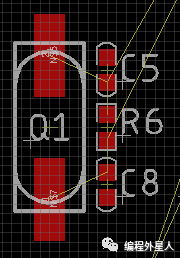
之后,将8MHz晶振和其振荡电路的电容C5和C8摆放在一起:
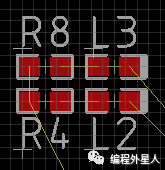
将L2和R4以及L3和R8摆放在一起,其中L2和L3是两个LED灯:
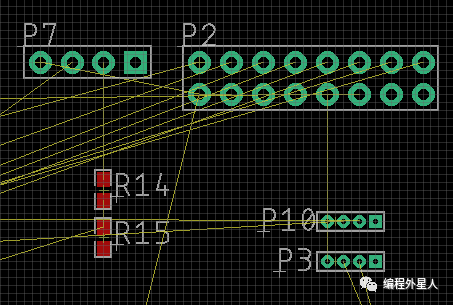
一些排针插座:
MPU6050电子陀螺仪和其相关的外围电路:
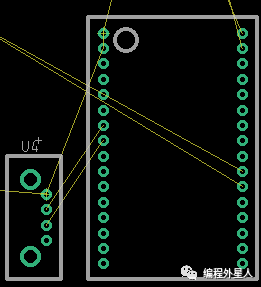
最后,NanoPi Duo2的插座和USB插座:
至此,我们的布局工作就完成了,来看一下整体布局:
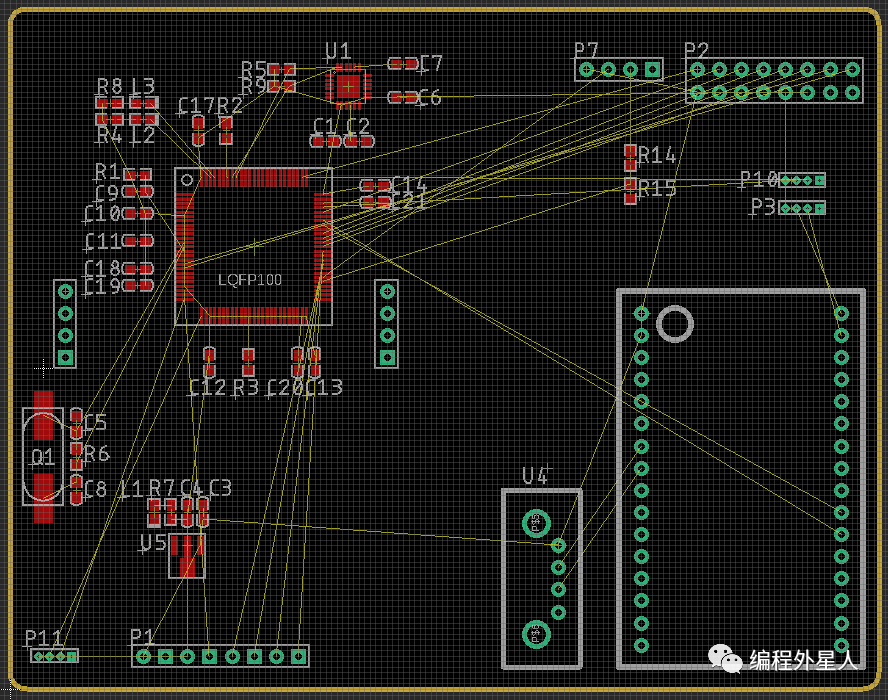
接下来,对所有网线进行布线:
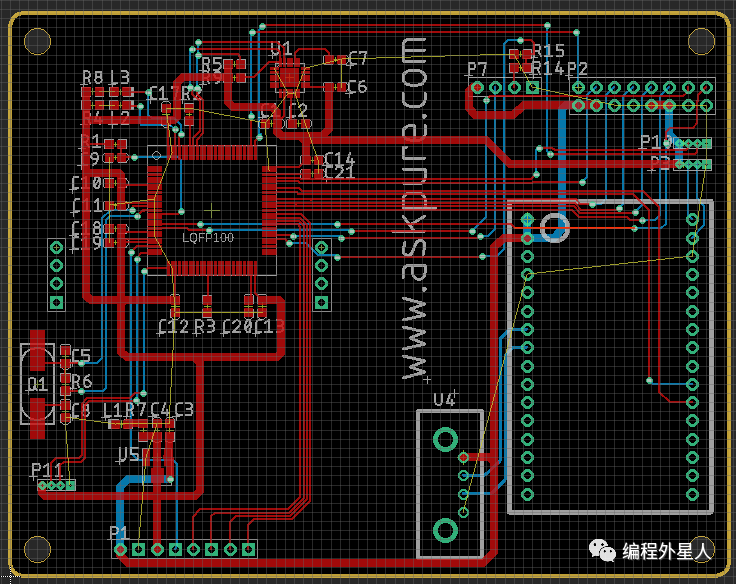
最后,对PCB顶层和底层进行覆铜,完成GND网络的连接:
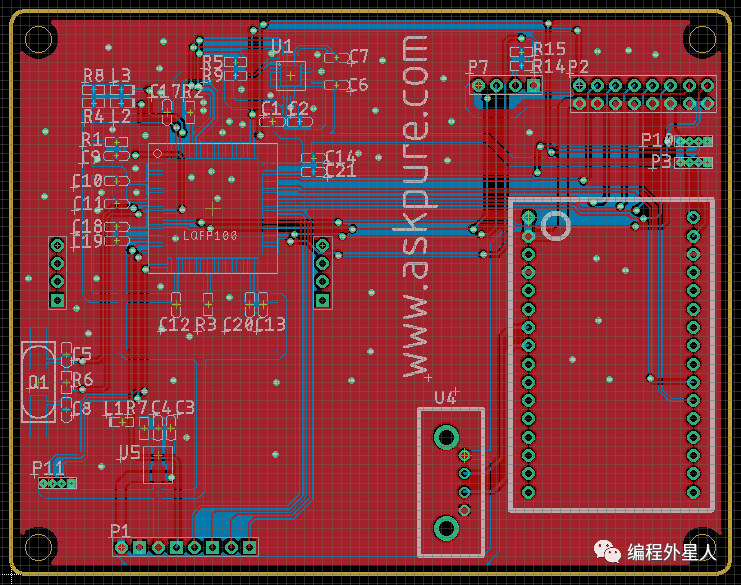
最终效果:
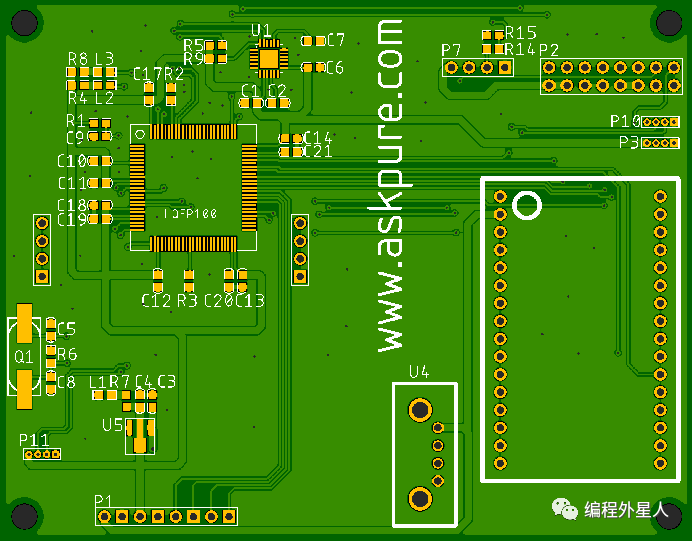
这样,我们就完成控制电路板PCB的设计工作,之后我们需要将设计图提交到工厂进行生产。
也就是说,控制模块是一个底板,上面带有几组插槽,电源模块和NanoPi通过引脚插入到底板当中完成组装。
此外,控制模块还需要接入超声波模块用于测量前方障碍物到车体的距离,以及一些预留的GPIO引脚。
我们完成控制模块的电路设计,我们本来可以选用STM32F103RCT6作为控制模块的处理芯片,并在其上完成嵌入式程序的开发,但就目前情况来看此芯片价格高居不下,于是我们选用了STM32F407VET6,也就是说使用了Cortex-M4系列芯片来作为我们的处理芯片。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
104条关于PCB布局布线的小技巧2025-01-07 2385
-
关于PCB布局布线技巧的104的问题2024-01-02 1864
-
PCB布局布线设计要点2023-09-19 989
-
PCB布局、布线、规则设计的高级技巧2023-09-09 5945
-
PCB布局布线技巧104问2023-05-05 1484
-
PCB布局布线的规则2022-10-28 3533
-
PCB布局布线的相关基本原理和设计技巧2022-02-12 6988
-
PCB的布局与布线介绍2021-07-01 3205
-
PCB布局和布线求解!2018-04-03 5615
-
PCB布局布线的100个基本问题解答2018-03-20 10576
-
PCB布局布线资料2017-11-03 1265
-
PCB布局布线2016-03-22 1253
-
PCB布局布线技巧100问2011-12-14 3537
-
PCB布局布线技术的发展2010-06-09 859
全部0条评论

快来发表一下你的评论吧 !
