

纯电动车辆的结构及其原理
汽车电子
描述
电动车定义
纯电动汽车是完全由可充电电池(如铅酸电池、镍镉电池、镍氢电池或锂电子电池)提供动力源,以电动机为驱动系统的汽车。其主要动力系统由动力电池、驱动电机组成,从电网取电或更换蓄电池获得电能。
电动车结构
传统内燃机车主要由发动机、车身、底盘、电气设备等四大部分组成;
纯电动车主要由电力驱动控制系统、底盘、车身、辅助系统等四大部分组成。
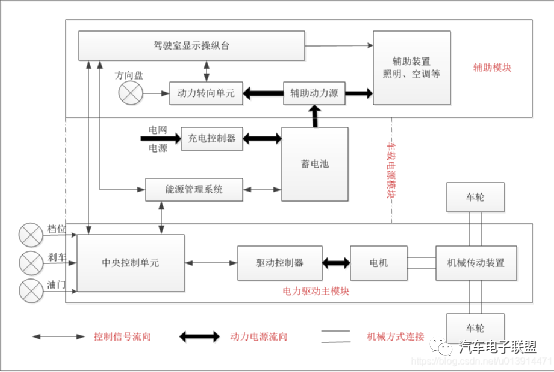
图1 纯电动车整车控制原理图
典型的纯电动车组成如上图所示,主要包括:电源系统、电力驱动系统、整车控制器和辅助系统等。动力电池输出电能,通过电机控制器驱动电机运转产生动力,在通过减速机构将动力传给驱动车轮,使电动汽车行驶。
电源系统
电源系统主要包含动力电池、电源管理系统、车载充电机以及辅助动力源等。
**动力电池:
**电动汽车的动力源,储能装置,以锂电子电池为主;
**电源管理系统:
**实时监控动力电池使用情况,对动力电池的端电压、内阻、温度、蓄电池电解液浓度、电池剩余电量、放电时间、放电电流或放电深度等动力蓄电池状态参数进行检测,并按动力电池对环境温度的要求进行调温控制,通过限流控制避免动力蓄电池过充、过放电,对有关参数进行显示和报警,其信号流向辅助系统,并结合仪表显示相关信息,以便驾驶员及时掌握车辆信息;
**车载充电机:
**把电网供电制式转换为对动力电池充电要求的制式,即把交流电(220V或380V)转换为相应电压(240~410V)的直流电,并按要求控制其充电电流(家庭充电一般为10或16A);
辅助动力源:
一般为12V~24V的直流低压电源,主要给动力转向、制动力调节控制、照明、空调、电动车窗等各种辅助用电装置供电。
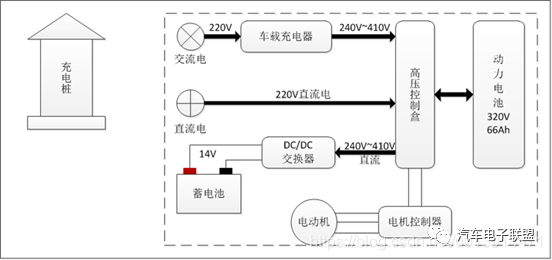
图2 电源系统
电力驱动系统
电力驱动子系统是电动汽车的核心,也是区别于内燃机汽车的最大不同点。驱动系统一般由电子控制器、功率变换器、驱动电动机、机械传动装置和车轮等部分构成。驱动系统的功用是将存储在蓄电池中的电能高效地转化为车轮的动能进而推进汽车行驶,并能够在汽车减速制动或者下坡时,实现再生制动。
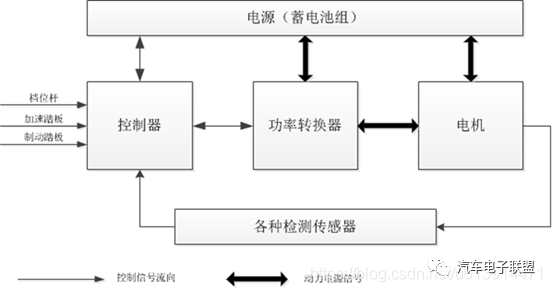
图3 电力驱动系统
驱动电动机的作用是将电源的电能转化为机械能,通过传动装置驱动或直接驱动车轮。早期电动汽车上广泛采用直流串激电动机,这种电动机具有“软”的机械特性,与汽车的行驶特性非常适应。但直流电动机由于存在换向火花、比功率较小、效率较低和维护保养工作量大等缺点,随着电动机技术和电动机控制技术的发展,正在逐渐被直流无刷电动机(BCDM)、开关磁阻电动机(SRM)和交流异步电动机所取代。
整车控制器
整车控制器是电机系统的控制中心,也就是常说的VCU(Vehicle Control Unit),也就是图1中的中央控制单元。它对所有的输入信号进行处理,并将电机控制系统运行状态的信息发送给整车控制器。根据驾驶员输入的加速踏板和制动踏板的信号,向电机控制器发出相应的控制指令,对电机进行启动、加速、减速、制动控制。在纯电动汽车减速和下坡滑行时,整车控制器配合电源系统的电池管理系统进行发电反馈,使动力蓄电池反向充电。整车控制器还对动力蓄电池充放电过程进行控制。对于与汽车行驶状况有关的速度、功率、电压、电流等信息传输到车载信息显示系统进行相应的数字或模拟显示。
电机控制器内含功能诊断电路。当诊断出现异常时,它将会激活一个错误代码,发送给整车控制器。电机控制系统使用了以下传感器来提供电机的工作信息。
**电流传感器:
**用以检测电机工作的实际电流(包括母线电流、三相交流电流);
**电压传感器:
**用以检测供给电机控制器工作的实际电压(包括高压电池电压、蓄电池电压);
温度传感器:
用以检测电机控制系统的工作温度(包括模块温度、电机控制器温度)。
辅助系统
辅助系统包括车载信息显示系统、动力转向系统、导航系统、空调、照明及除霜装置、刮水器和收音机等,借助这些辅助设备来提高汽车的操纵性和成员的舒适性。
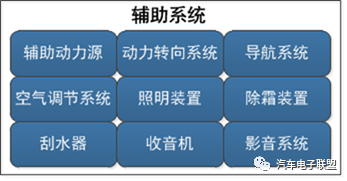
图4 辅助系统
电动车可能存在的结构形式
由于在电驱特性和能源方面的多样性,可能有各种的EV(Electric Vehicle)结构形式,如下图所示。
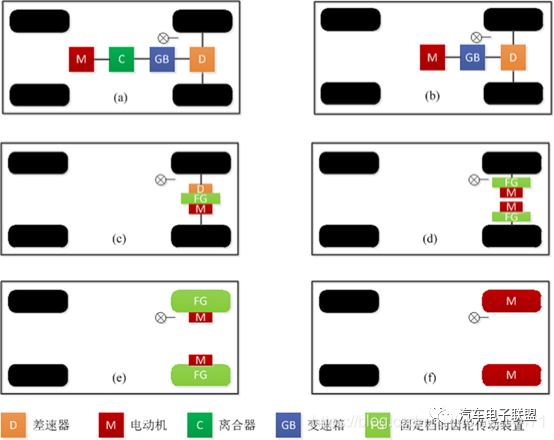
图5 电动车可能存在的结构形式
图5a为电动机中央驱动形式,借用了内燃机汽车的驱动方案,其中电驱动装置替代了传统车辆驱动系的内燃机,它由电动机、离合器、变速器和差速器组成。离合器和变速箱可由自动传动装置予以替代,离合器用以将电动机的动力连接到驱动轮,或从驱动轮处脱开。变速箱提供一组传动比,以满足不同转速的需求。差速器是一种机械器件(通常是一组行星齿轮),当车辆沿着弯曲的路径行驶时,它使两侧车轮以不同的转速行驶。
图5b为电动机中央驱动形式,借助于电动机在大范围转速变化中所具有的恒功率特性,可用固定档的齿轮传动装置替代多速变速箱,并缩减了对离合器的需要。这一结构不仅减小了机械传动装置的尺寸和重量,而且由于不需要换挡,故可简化驱动系的控制。
图5c类似于图4b中的驱动系,为另一种电动机中央驱动形式。固定档的齿轮传动装置和差速器可以进一步集成为单个组合件,而其两侧的轴连接两边的驱动轮。整个驱动系由此可以进一步得到简化和小型化。
图5d为双电动机电动轮驱动方式,机械差速器被两个牵引电动机所替代。该两电动机分别驱动相应侧的车轮,并当车辆沿弯曲路径行驶时,两者以不同转速运转。
图5e为轮毂电动机驱动方式,为进一步简化驱动系,牵引电动机可安置在车轮内。这种配置就是通常所说的轮式驱动。一个薄型行星齿轮组可用以降低电动机转速,并增大电动机转矩,该薄型行星齿轮组具有高减速比以及输入和输出轴纵向配置的优点。
图5f为另一种轮毂电动机驱动方式,通过完全舍弃电动机和驱动轮之间的任何机械传动装置,应用于轮式驱动的低速外转子型电动机可直接连接至驱动轮。此时,电动机的转速控制等价于车轮的转速控制,即车速控制。然而,这一配置要求电动机在车辆起动和加速运行时具有高转矩性能。
-
两轮自平衡电动车及其电机控制器设计2025-06-09 491
-
电动车结构及其工作原理是什么2021-06-30 2368
-
现代电动车辆中电控技术的应用是什么2021-05-12 1654
-
基于MM32SPIN05的电动车辆方案2021-01-21 1770
-
“电池均衡”是什么意思,风阻系数对于纯电动车有多重要2020-12-25 8205
-
关于增程式电动车与纯电动该如何选择2020-01-05 5012
-
关于纯电动车的一些介绍2020-01-01 3752
-
解决纯电动车续航问题的多种方案2019-08-08 2735
-
车电分离会是纯电动车的最佳出路吗2019-07-11 2084
-
求一个基于labview电动车辆的测试系统2016-04-30 4634
-
中国纯电动车将去向何方2012-12-30 2544
-
如何判断增程式电动车与插电式混合动力汽车2012-10-14 4910
-
深层讲解:电动车辆技术问题2012-03-30 1955
-
电动车辆控制电路2009-01-10 1468
全部0条评论

快来发表一下你的评论吧 !
