

双极性步进电机的基本组件有哪些
电子说
描述
在如今这个智能时代,步进电机因其特有的开环位置控制性能而被广泛应用。各设备在步进电机转动的过程中,对它输出力矩的平滑性有一定的要求。转动的稳定性除了和步进电机的本体结构有关,也和步进电机的控制方式息息相关。
本文将介绍双极性步进电机及其结构和控制模式。
双极性步进电机的基本组件
步进电机属于无刷直流 (BLDC) 电机,它按照等长的步进值逐步转动。而双极性步进电机则是每相都拥有一个绕组的步进电机,具体而言是两相四线步进电机。它由定子和转子两个主要部件组成(见图 1)。
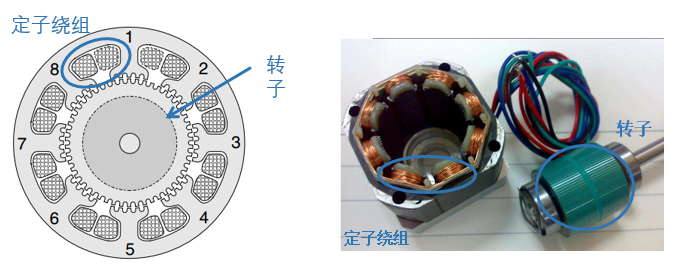
图1: 双极性步进电机的结构示意图
定子
定子是电机的静止部分。8 个定子上分别绕有两相双极性绕组,每个定子铁芯上带有五齿(见图 1)。
A 相绕组绕线从定子 1 开始绕,依次绕到定子3, 5, 7上(见图 2)。 值得注意的是,定子 1 和 5 的绕线方向相同,而定子 3 和 7 的绕线方向相同。这两组(定子 1 和 5,以及定子 3 和 7)的绕线方向相反。B 相绕组也是以同样的原理进行绕制,其中定子 4 和 8 为一组,定子 2 和 6 为一组。
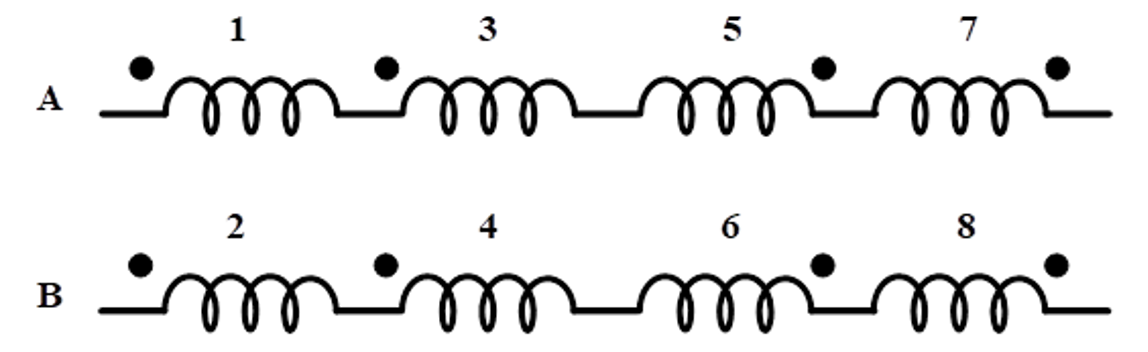
图2: 双极性步进电机的绕组原理图
转子
通常转子上贴有轴向充磁的永磁体。图 3 所示为转子的结构。
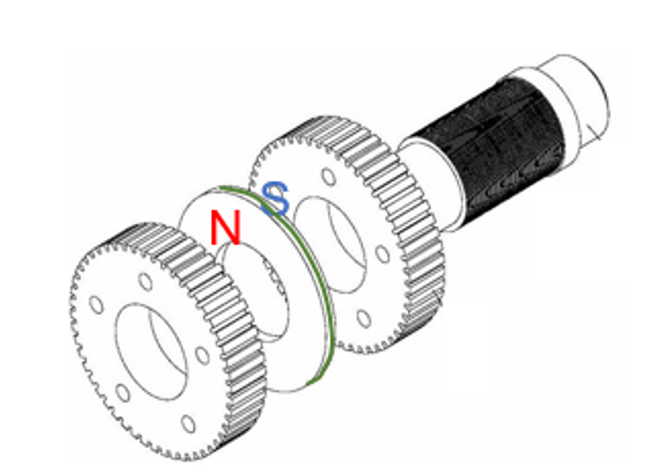
图3: 转子结构示意图
图 4 展示了转子的侧面截面图。
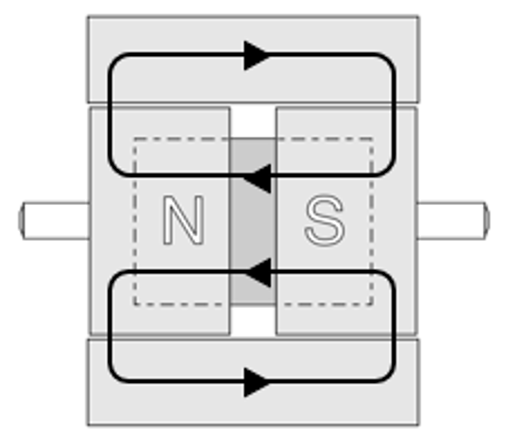
图4:转子侧面截面图
永磁体的磁力线在电机本体内形成闭合。由于磁力线和磁阻效应,即使步进电机在不通电的情况下也有一定的锁定力矩(见图 4)。
转子上拥有 50 个齿,和定子齿轮相对起来,由于这样的齿数和相数结构,它拥有 1.8 度的步进角度(见图 5)。步进角度:电气周期完成 90 度,步进电机转子前进的机械角度。
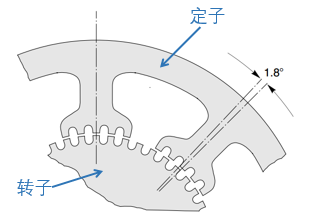
图5: 1.8°步进角度结构示意图
讨会 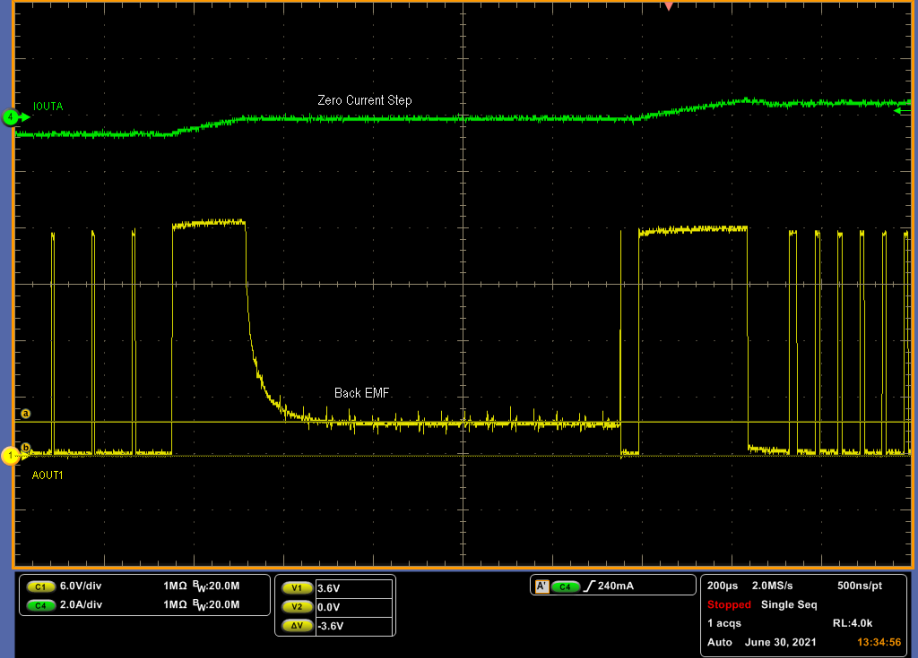
步进电机和反电动势
了解电动势(EMF)及其对步进电机运动的影响等
文章 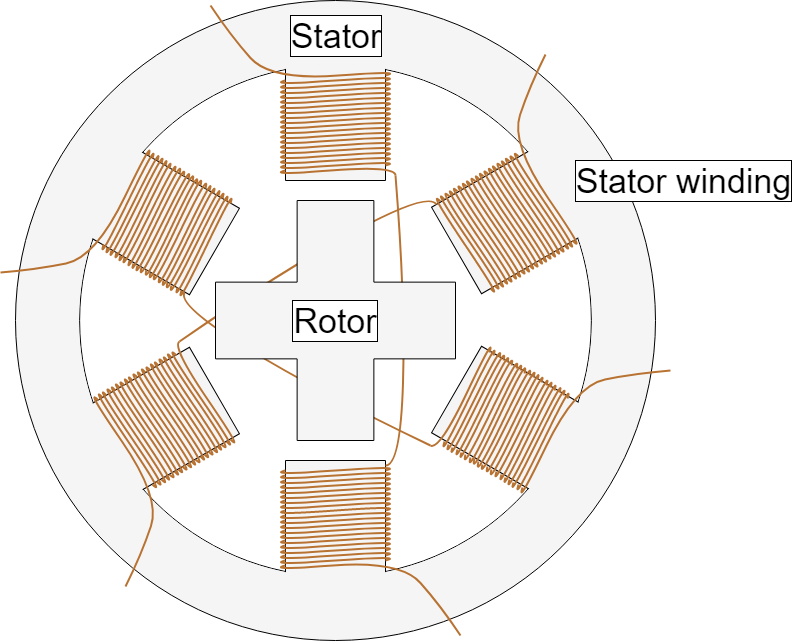
步进电机基础知识:类型、用途和工作原理
了解步进电机的基础知识
了解带微步进功能的 MPS 集成双极性步进电机驱动器
应用模块 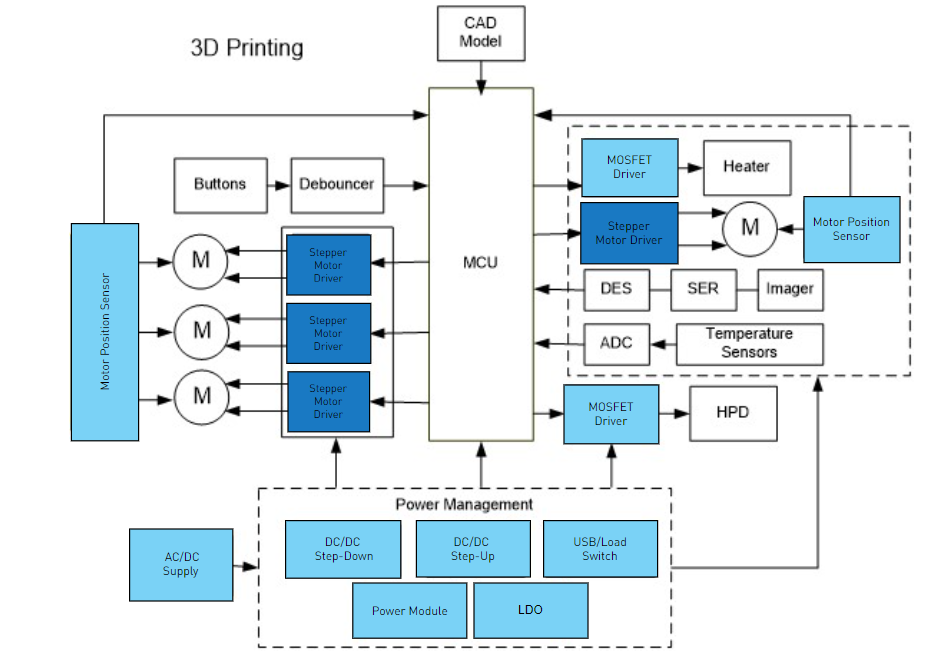
3D 打印机
MPS 为下一代 3D 打印机设计提供了最佳解决方案
步进模式
为了方便讲解后续的控制方式,我们将复杂的结构图简化为示意图(见图 6)。
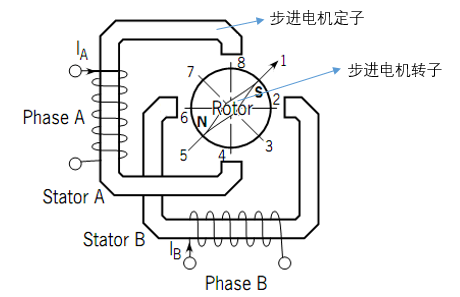
图 6:双极性步进电机简化示意图
步进电机的定子和转子可以被看作都只有一个齿,这使步进电机的驱动方式不同于其他电机。这种方法叫做双全桥驱动,其中 A 相绕组接在第一个全桥驱动上, B 相绕组接在第二个全桥驱动上(见图 7)。
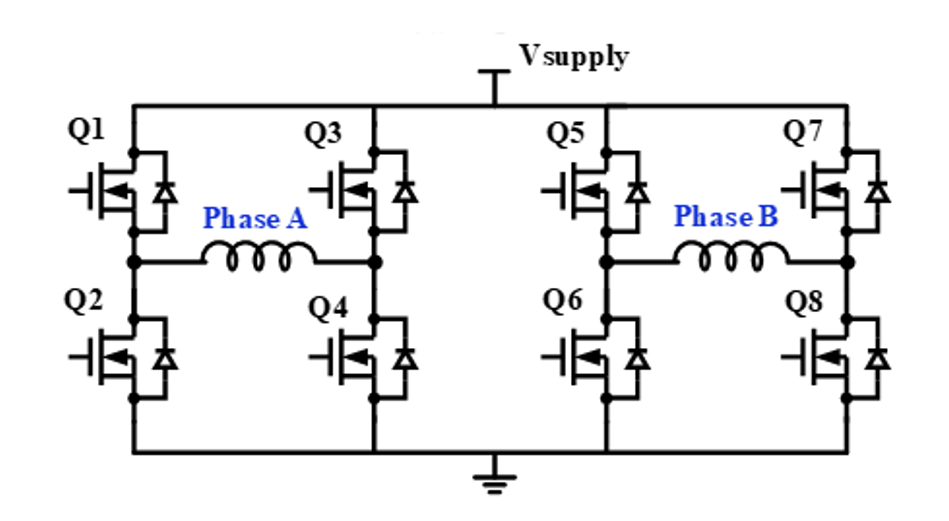
图 7:双全桥驱动电路图
双极性步进电机具有三种控制模式:单相步进、整步步进和半步步进(见表 1)。
表1: 步进模式表
| 步进模式 | 通电顺序 | 电气角位置 |
| 单相步进 | $A > B >上线{A} >上线{B}美元 | 8美元 > 2美元 > 2美元 > 4美元 > 6美元 |
| 整步步进 | $AB >上线{A}B >上线{AB} >A上线{B}$ | 1美元 > 3美元 > 5美元 > 7美元 |
| 半步步进 | $AB > B > > 上线{A} B >上线{A} >上线{A} >上线{A} >上线{AB} >上线{B} >A上线{B} >A上线{B} >A$ | 1美元 > 2美元 > 2 > 2美元 > 3 > 3 > 4 > 4 > 5 > 5 > 5 > 6 > 6 > 7 > 7 > 8美元 |
单相步进
当 A 相和 B 相按照单相步进的模式依次通电的时候,定子磁场会相应地发生变化,转子也会由于极性吸引而转动。表 1 中详细描述了 A 相和 B 相 (AB) 的通电顺序和转子的转动位置。
单相步进过程具体包括三个步骤,如下所述:
当 A 通电的时候,驱动电流由 Q1 流向 Q4。此时定子 A 上端为 N,下端在 S,转子转到位置 8(见图 6)。
接下来,B 相通电,驱动电流由 Q5 流向 Q8。此时定子 B 左端为 S,右端为 N,转子转到位置 2(见图 6)。
接下来两个状态原理和上面类似,循环这一通电顺序,转子就开始转动起来。
图 8 显示了单相步进 AB 相的电流波形。
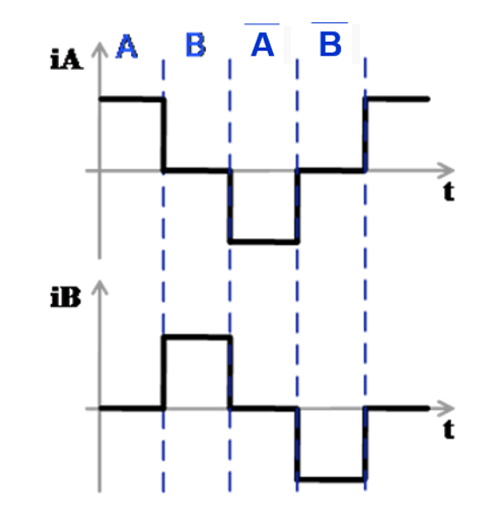
图 8:单相步进 AB 相电流波形图
整步步进
与单相步进不同的是,整步步进式 AB 绕组会同时进行通电。另外还有四个对应的通电方式和转子电气位置,只是其位置空间在电气空间上不同于单相步进。根据整部的通电顺序,转子也能转动起来。图 9 显示了 AB 相的整步电流波形。
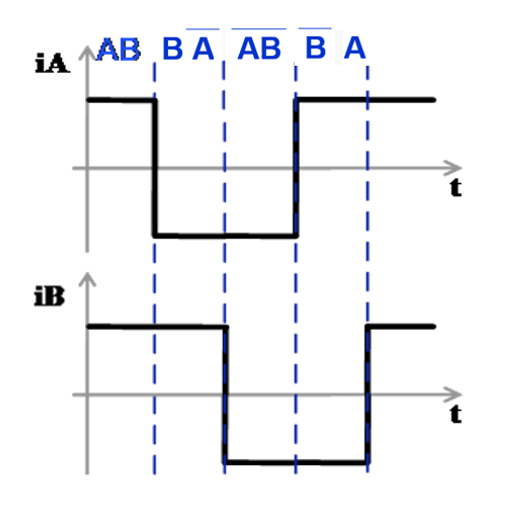
图 9:整步步进 AB 相电流波形图
半步步进
半步模式将单相步进和整步步进这两种控制方式进行融合,它的电气角度位置更多,电流波形更加细致,转动更加平滑。
图 10 显示了单相到两相操作的非循环半步模式。这种模式在整步和半步之间交替生成 8 步序列。
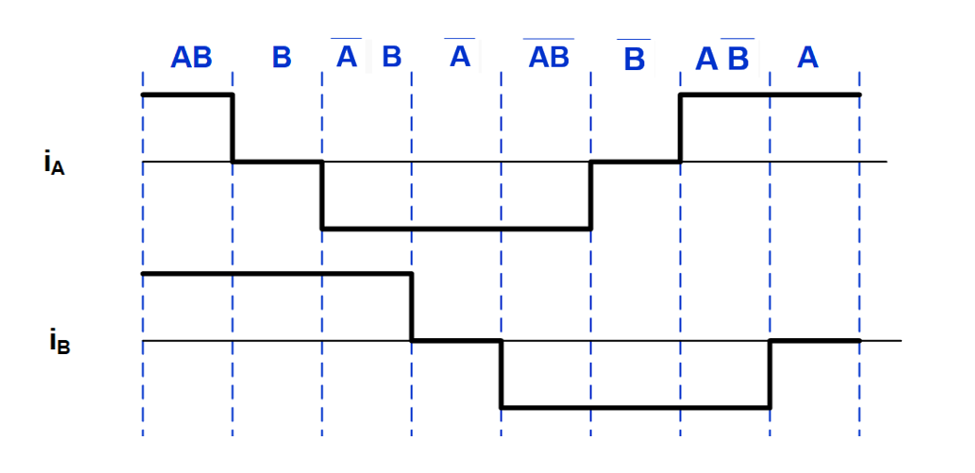
图 10:非循环半步模式
结语
本文回顾了双极性步进电机的基本组件(定子和转子),以及三种主要的控制模式:单相步进、整步步进和半步步进。在下一篇文章中,我们将讨论双全桥驱动的微步进模式。
MPS 提供丰富的 步进电机驱动器 产品,可以满足各种应用需求。
审核编辑:彭菁
-
什么是双极性步进电机?它有哪些特点?2024-06-12 2948
-
步进电机的相关知识:相、线、极性和步进方式2023-03-24 1234
-
STM32物联网项目之双极性步进电机2023-03-22 561
-
永磁双极性步进电机原理2023-03-21 539
-
双极性步进电机的基本结构2023-03-08 2193
-
两相双极性步进电机的工作原理及仿真2023-03-01 5432
-
步进电的单极性驱动与双极性驱动技术差异2022-10-19 7163
-
什么是双极性步进电机?2021-10-27 3883
-
单/双极性步进电机对比分析哪个好?2021-09-24 2335
-
步进电机的线、相、极性分别是什么意思2021-07-07 2468
-
解析双极性步进电机的基础知识2018-07-30 23861
-
以四线双极性步进电机为例,教你如何解决步进电机只颤不转问题2017-11-27 28130
-
双极性步进电机驱动电路2010-06-11 6846
全部0条评论

快来发表一下你的评论吧 !
