

双极踏脚车(第二部分):微步和衰减模式
电子说
描述
双极踏脚车(第二部分):微步和衰减模式
In 第一部分 第一部分 第一部分在此系列中,我们覆盖了双极继子发动机的三个控制模式及其机械结构,包括双全桥驱动器。 在第二部分中,我们将讨论微步器及其控制双全桥驱动器的方式。
Microstepping
以前,半步制是作为单步制和全步制相结合的组合引入的,以获得更多的电角位置。 微步制增加了中间角位置,这创造了更精细的步骤。
图1显示了微梯度中的8个分区。单级阶梯的90°电气角度分为8个等距部分,代表8个现有位置。每个位置的当前位置是按A阶段向风和B阶段向风的当前状态合成的矢量。由此产生的矢量的振幅始终为1。
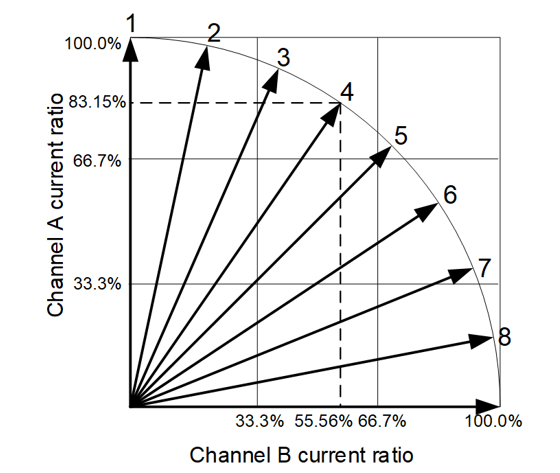
每个职位的当前位置必须分别投射到A阶段和B阶段,以获得控制值(见表1)。
| 步步模式 | 当前相对级别序列(%) | 现任职务 | |
| A阶段 A阶段 | B阶段B阶段 | ||
| 第八步 | 100 | 0 | 1 |
| 98.08 | 19.51 19.51 19.51 19.51 | 2 | |
| 92.39 | 第第38.27号号 | 3 | |
| 83.15 | 55.56 | 4 | |
| 70.71 70.7 70.7 | 70.71 70.7 70.7 | 5 | |
| 55.56 | 83.15 | 6 | |
| 第第38.27号号 | 92.39 | 7 | |
| 19.51 19.51 19.51 19.51 | 98.08 | 8 | |
适用说明 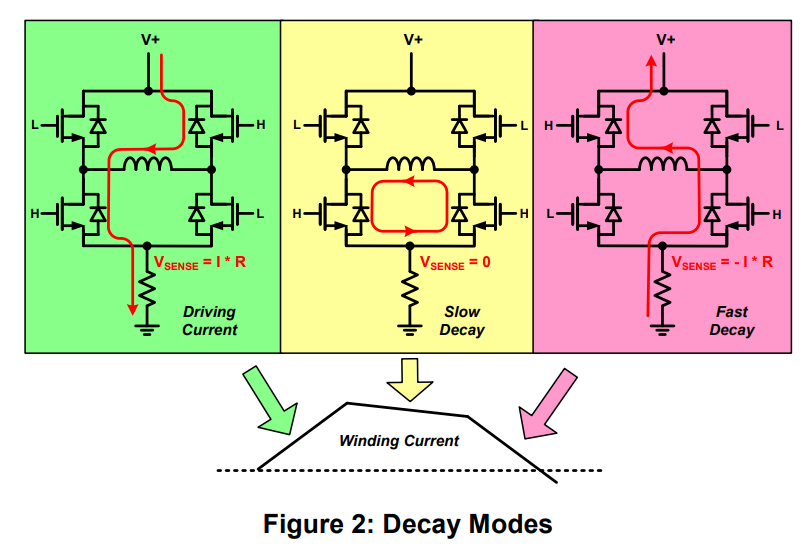
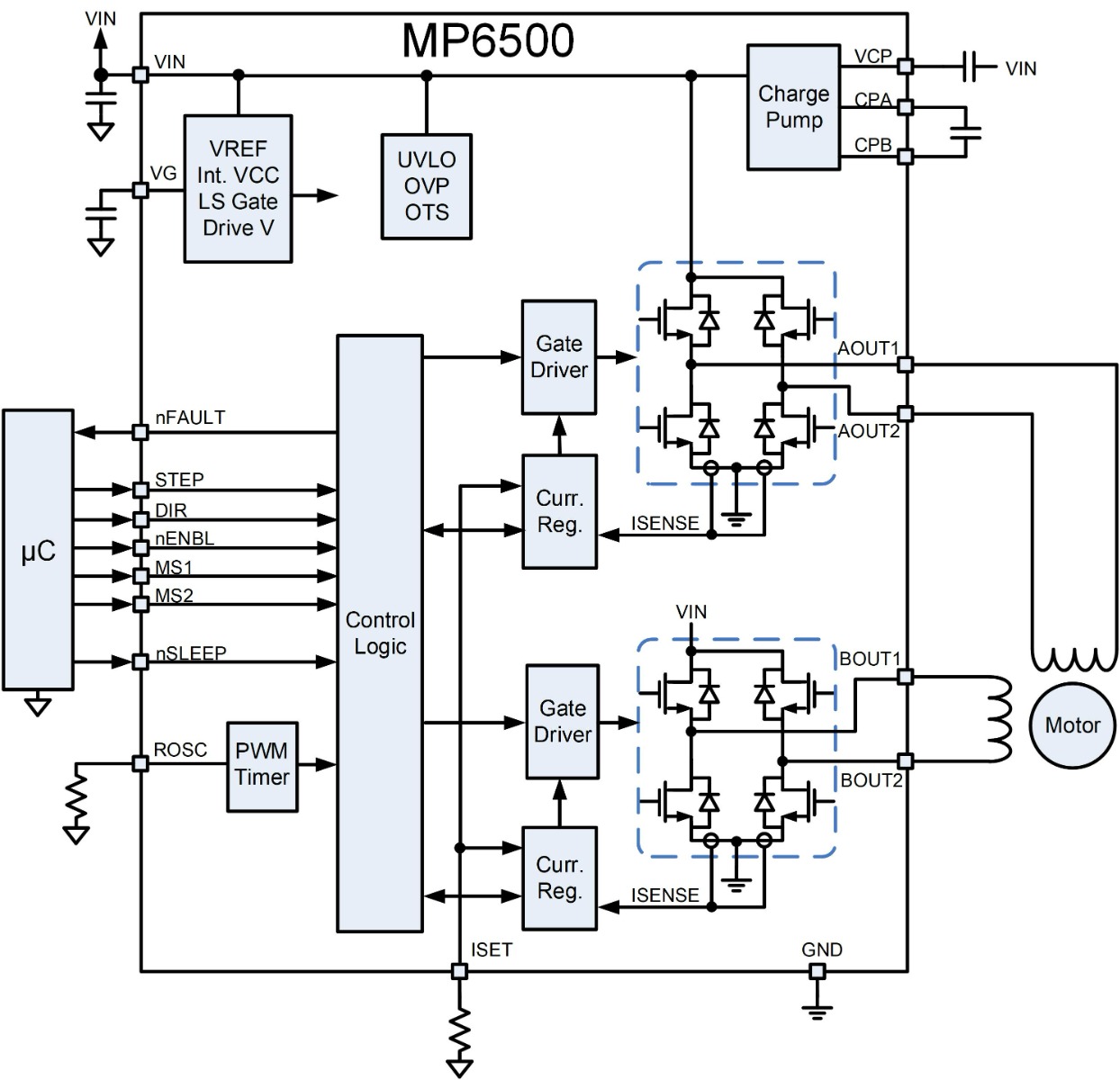
理解 MP6500 MP6500 当前控制
A阶段和B阶段的电流可以根据表1中的相应值加以控制,通过控制当前值,有可能在相应的角度上合成A阶段和B阶段的当前矢量。
在八个分区(或阶梯)的控制下,双极继子发动机的电流类似于正弦波(见图2 ) 。 如果有更多步骤的话,双极继子继子发动机的电流类似于标准的正弦波。 正弦波形电波可以减少发动机输出力的波动,并形成一个循环旋转的空间磁场,从而改善双极继子发动机的旋转稳定性。
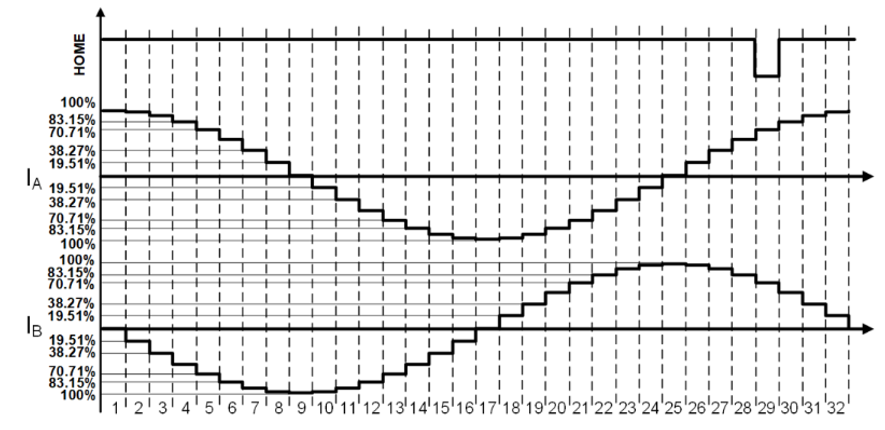
Figure 2: A阶段 A阶段 and B阶段B阶段 Current Waveform under Eight-Step Microstepping
Current Regulation with Decay Modes
缓慢的衰减和快速的衰减是用来稳定当前每一步的典型控制方法。 图3显示了A阶段的单步。 图3显示了A阶段目前的监管波形,这是通过控制A阶段全桥驱动驱动的四个MOSFET的开关/停机功能实现的。
下文将进一步详细讨论这两种衰变模式。
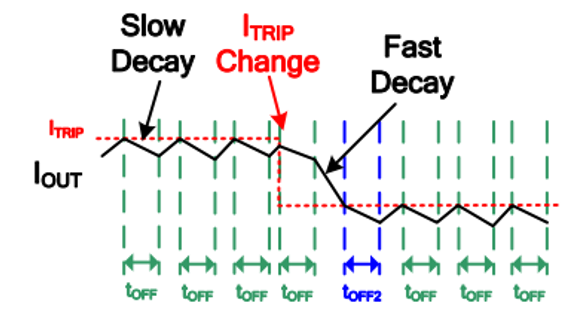
Figure 3: A阶段 A阶段's Current Regulation Waveform
Slow Decay
当Q1和Q4开关时,供应电压(U)应用于A阶段的刮线,而电流开始上升。 在相应的等效电路中,R是阻风力,L是推力(具有等效阻力 ) , E是转子移动磁场在刮线时产生的反电磁力(见图4)。
当当前值达到理想值时,必须降低当前值。 否则,当前值可能会继续增加并超过其设定值。 在此情况下,需要慢衰减 。
图4显示了A级全桥驱动器的缓慢衰减过程。
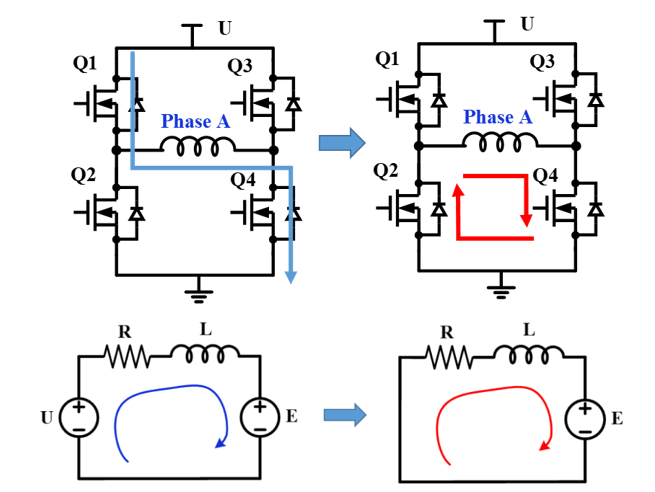
Figure 4: Slow Decay Process for A阶段 A阶段's Full-Bridge Drive
输入慢衰变, 关闭 Q1 并打开 Q2( 点燃死时) 。 这相当于短路绕过 A 阶段的绕线 。 由于通过 刮风的通气, 当前方向不会突变, 而当前在两个较低的 MOSFET 中形成循环流。 只有后电动力量( E) 作用在电路上, 电流会发生逆电压下降 (- E) 并开始下降 。 如果阻力造成的电压下降被忽略, 目前的电流会以( E/ L) 速度下降 。
在当前下降一段时间后, Q2 将被关闭 Q1 以允许当前再次上升 。 此过程将稳定当前在每一步的状态 。
Fast Decay
当电流即将进入一个需要较低时, 电流必须进一步下降。 如果电流下降速度不够快, 慢衰减速度可能不够快, 无法将电流降低到理想水平 。 在这种情况下, 需要快速衰减( 见图 5)。
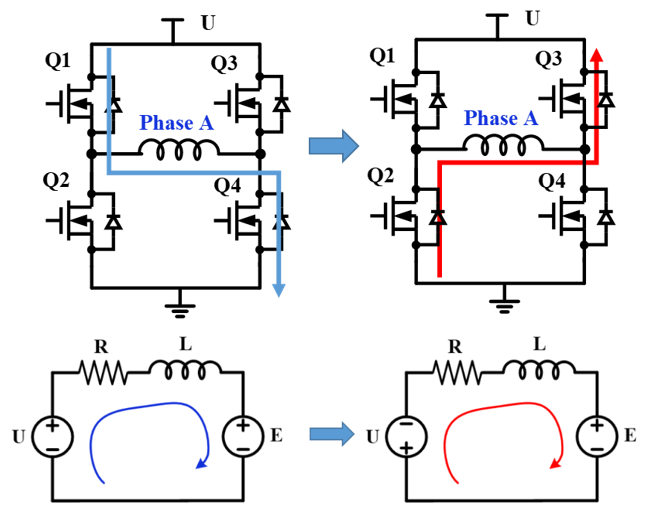
Figure 5: Fast Decay Process for A阶段 A阶段’s Full-Bridge Drive
在快速衰变期间, Q1 和 Q4 关闭后 , Q2 和 Q3 打开 Q1 和 Q4 关闭后 , ( 点燃死的时间 ) 。 此时, 供应电压被逆向应用到 A 阶段, 与 EMF (E) 序列一起使用 EMF (E) 。 当前的流量从 Q2 到 Q3 , 因为通过 风动 的 电流不会突然改变 。 当前的降速以 (( EU) / L) 的速度( eU) , 因此当前降速快于慢衰减的速度 。
Comparison of the Different Current Controls
当当前跌至下一个步骤的设定值时,当前监管方案可以从快速衰变变为缓慢衰变。 利用慢衰变和快速衰变让受控电流快速变化,同时将当前波纹最小化。 图6显示了使用快速衰变、慢衰变以及快速和缓慢衰变组合的当前波形,而当前波状是绿色的。
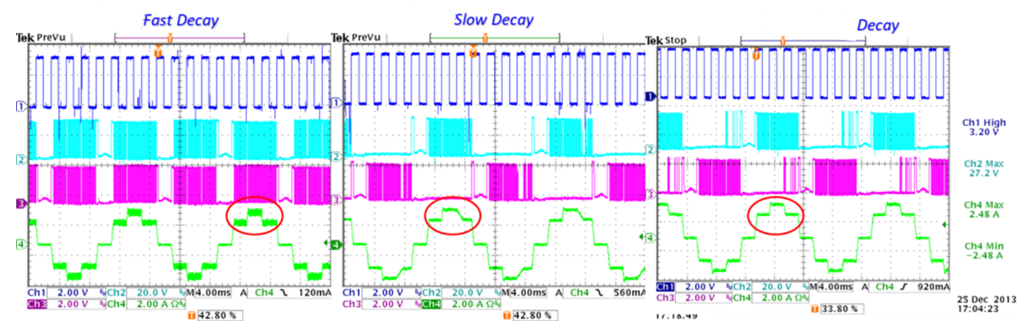
Figure 6: Current Waveforms under Different Current Controls
在缓慢衰变期间,目前的衰变在较长的一段时间内减少,而下降到下一步,但这导致了扭曲的波形。
当快速衰变和慢衰变同时起作用时,当双极继子体运动处于一个阶梯位置时,慢衰变调节着当前,而当电流必须迅速下降到下一个阶梯值时,快速衰变则更有效地控制当前。
Conclusion
微步动可以比全步或半步模式更精细的定位和平稳的操作。 本条讨论了如何利用各个步骤之间的慢衰变和快速衰变来稳定当前。 此外, 这些衰变模式结合可以减少扭扭波,减少振动和噪音。
MPS 提供一系列广泛的踏脚车司机满足您的申请需求。
审核编辑:彭菁
-
SensorTile.box第二部分:专家模式(Expert mode)介绍2023-07-31 857
-
救世主Ga N来啦!第二部分:测量2022-11-03 916
-
如何实现更高的系统效率——第二部分:高速栅极驱动器2022-11-02 811
-
超声波感应器会被用于何处?—— 第二部分2022-11-01 1102
-
有时你需要一点收获第二部分2021-04-19 896
-
AN-389: 使用Σ-Δ转换器—第二部分[中文版]2021-03-19 1144
-
如何使用 Nios II 处理器进行你中意的设计之第二部分教程2018-06-11 6316
-
2012年PSoC数模混合设计培训_第二部分2017-10-27 1137
-
中国NB-IOT产业联盟-第二部分问题清单-201608242017-01-11 1242
-
微型模块电源产品第二部分2016-03-17 928
-
常用单片机实例与仿真_第二部分2015-11-10 669
-
AT91SAM9260使用手册第二部分2010-03-10 1444
-
实现免调整VCO1的IC (第二部分)2006-05-07 1256
全部0条评论

快来发表一下你的评论吧 !
