

MagAlpha 角度传感器的线性标准
电子说
描述
使用 MagAlpha 的侧形结构时, 用户需要考虑几个标准才能达到高度线性输出。 MagAlpha 角度传感器有一个内置线性选项( 称为“ BCT ”) , 来处理如下事实, 即传感器所看到的磁场的2个正方形组件随着磁铁的发生革命而具有不同的振幅。 然而, 事实证明, 传感器或磁性位置的某些不完善之处, 或磁性被磁化的方式, 可能产生无法通过 BCT 调整来弥补的错误。 本说明描述了哪些特征需要观察, 以及人们能够期望知道哪些不完善之处的线性。 它可以帮助指定机械和磁性容度 。
1.1 理想情况
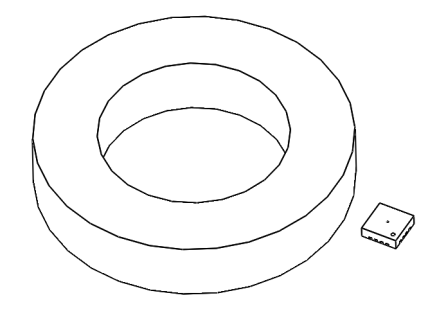
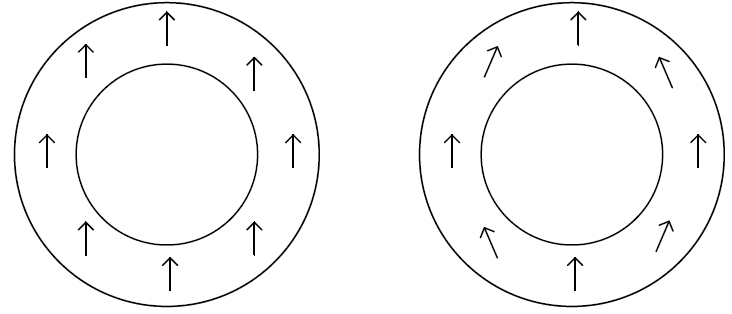
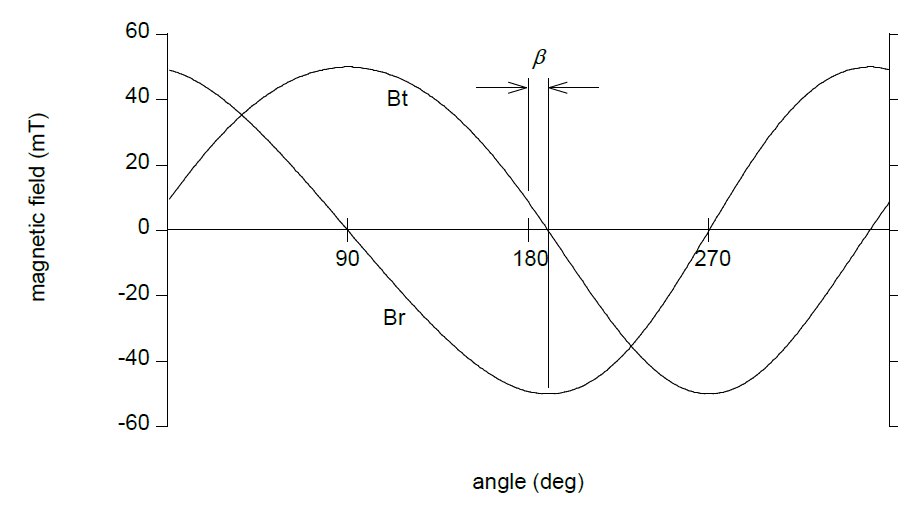
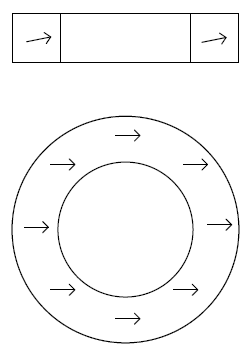
磁场,由一个带统一磁化的有限圆形圆形圆轨圆形圆柱体产生的磁场(见图1)以磁铁为中心是角度的正弦函数。
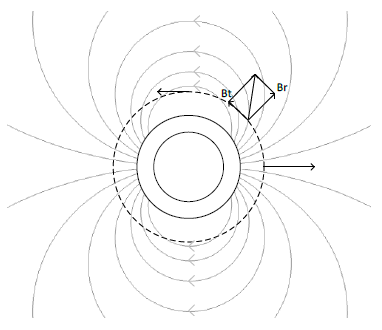
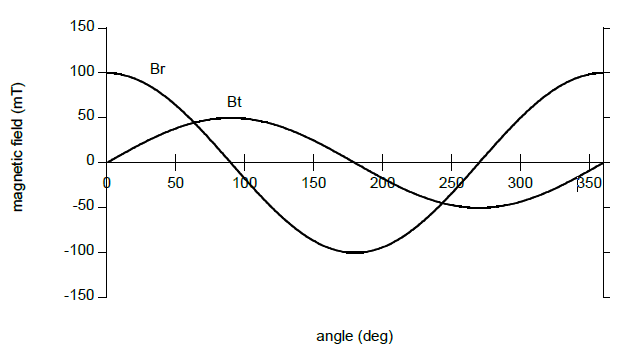
对于限定高度环,Br和Bt的振幅一般不相同:Br和Bt的分析表达式,例如,这里可以找到(Caciagli等人,《磁力学和磁材料杂志》456(2018)423-432))。不同的振幅导致非线性传感器输出(所谓的“电子”错误)。错误曲线基本上有一个第二调(它使两个正弦作一个完全旋转)。通过改变辐射和正切灵敏度之间的比例,可以很容易地纠正这一错误。在MagAlpha,这个比率受参数“BCT”的控制。关于BCT调整的更多细节可以在任何MagAlpha数据表中找到。
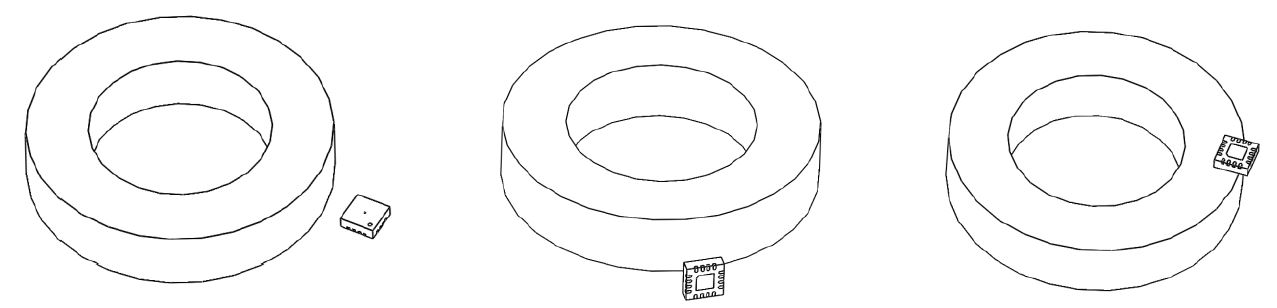
以侧括号表示,我们指传感器远离旋转轴旋转的任何配置。三种侧括号配置显示于图3 图3.
1.2 实际情况
在实际系统中,有些不完善之处产生非线性,不能通过任何BCT调整加以补偿:
定位不完善:由于系统机械容度造成的非理想磁铁和传感器位置
磁性不完善:磁性磁性的非理想磁化
如果所产生的误差曲线的顺序不同于第二调和, BCT 设置显然不能补偿错误。即使错误是第二调,如果阶段不同于由 K 比率与 1 的差错曲线,则错误不能通过 BCT 设置来补偿。即使错误可以通过 BCT 调整来补偿,但这一错误通常与磁铁不完全相同,因此需要在生产时进行个别校准。
2 Positional imperfections
2.1 传感器围绕轴轴旋转
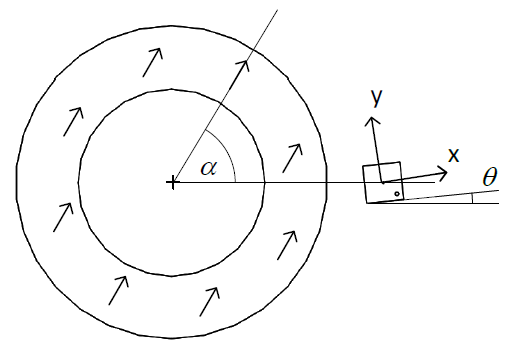
Figure 4 Imperfect sensor orientation: $theta$ is the rotation angle around the sensor normal axis
假设传感器完全对齐,而 BCT 参数完全设定来补偿磁场比例 k。 如果传感器沿着其正常方向旋转,输出成为非线性 :
当 $ alpha$ 是轴角时, 这意味着错误较大, K 比例更大。 请注意, 如果弧和正切成分都等于( k = 1) , 输出只被角值 $theta$ 抵消, 并且保持完全线性 。
与字段椭圆错误一样,传感器旋转产生的错误主要有第二个调和元件。然而,与椭圆错误相比,这个错误被移动了45度。这意味着这个错误不能通过 BCT 裁剪来补偿。因为BCT 参数在敏感度与 x 字段之比与 y 字段之比上运行,如果传感器旋转,传感器的x 和 y 组件与磁辐射和相近部件不匹配。
注意:以上公式对任何配置都有效:侧环、正环或顶环。
2.2 磁网偏心度
磁网偏心率产生第一个振幅的调差误差(以 deg) $ frac {2e} r frac {180} pi$, 其中美元是偏心率(图5)。这个表达式在 2D 中是准确的。对于一个有限的磁性高度,还有一个小的第三个调音元件。
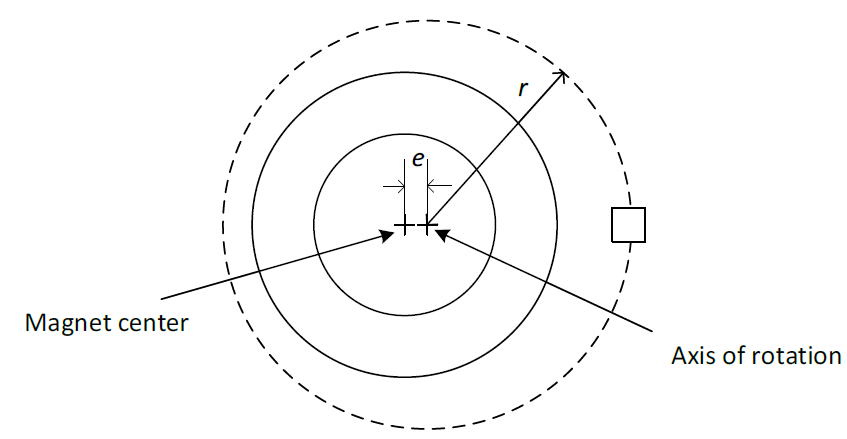
$frac {2e} rfrac {180} pi$ 振幅对于边环有效。 它可以用来粗略地了解正弦或顶环配置中的错误, 但在顶环中, 效果更大, 因为偏心在一次革命期间, 以美元计的比率会有很大的变异 。
2.3 辐射或轴迁离
假设 BCT 为特定传感器位置设置的完美。 如果位移将美元比修改为 $ Delta k$, 则导致的错误是第二曲调曲线 :
对于大梯度(K美元)沿线的流离失所情况,这一错误尤其严重。图6 图6
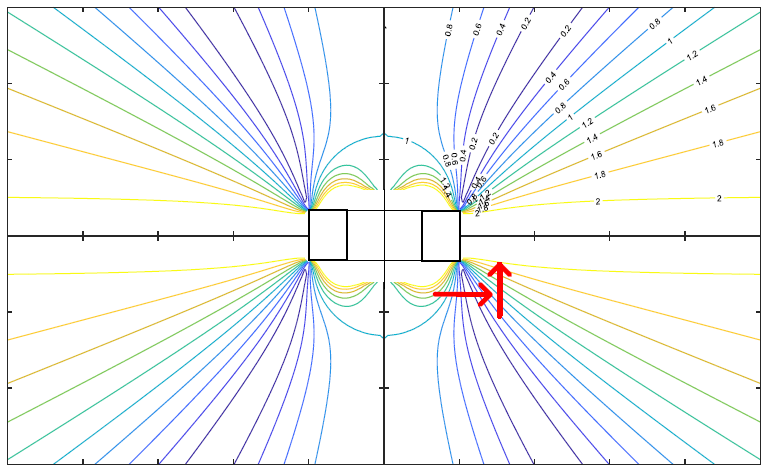
图6 图6 Lines of equal $k$ values for a typical magnet ring. large $k$ gradients are shown by red arrows
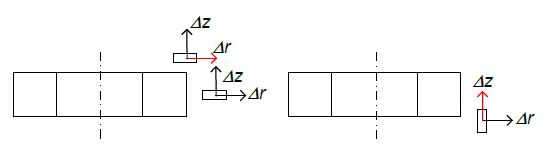
因此,关键的感官迁移是:
用于顶环的辐射迁移
以轴为正折叠流
侧环配置受影响程度较小。图7
这些不完善现象发生在制造过程中,特别是在磁化步骤期间。
3.1 由于去磁化场造成的非统一性
这种扭曲一般适用于所有磁环。 较窄的墙壁( 即接近输出直径的内直径) 更严重。 从质量上来说, 磁化矢量不是平行的,而是随环的弯曲而变化。 见 。图8
要在最后状态中被磁磁化,环将浸入一个沿直径方向的坚固的球体中。对于这一步骤来说,重要的是当地材料粒子所感受到的总磁场。通常称为H的球场是应用场(圆柱的距离)和“磁化场”的总和,即圆柱本身的相邻粒子所生产的场。结果发现,对于一个封闭的高气瓶来说,H是统一的。因此,所有磁场都朝着同一方向发展。统一的圆柱形在外圆轨道上产生完全正弦的正弦线、正流和轴形田。对于环形(圆柱形圆柱)来说,这种行为并不正确:H球会像在外圆轨道上一样变化。图9 图9。这不是磁铁的默认值,而是磁铁形状的结果。
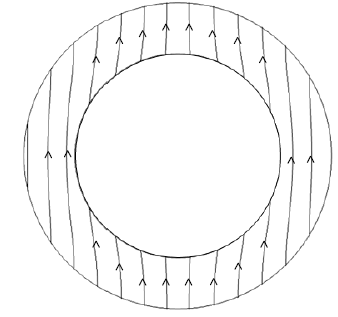
图9 图9 Total field H inside a ring, resulting from the application of a uniform field $H_{ext}$
一般而言,这种效果一般使半线(或轴)场的三角(或轴)场更加三角,而相偏近场的“方形”则更“方形”。图10
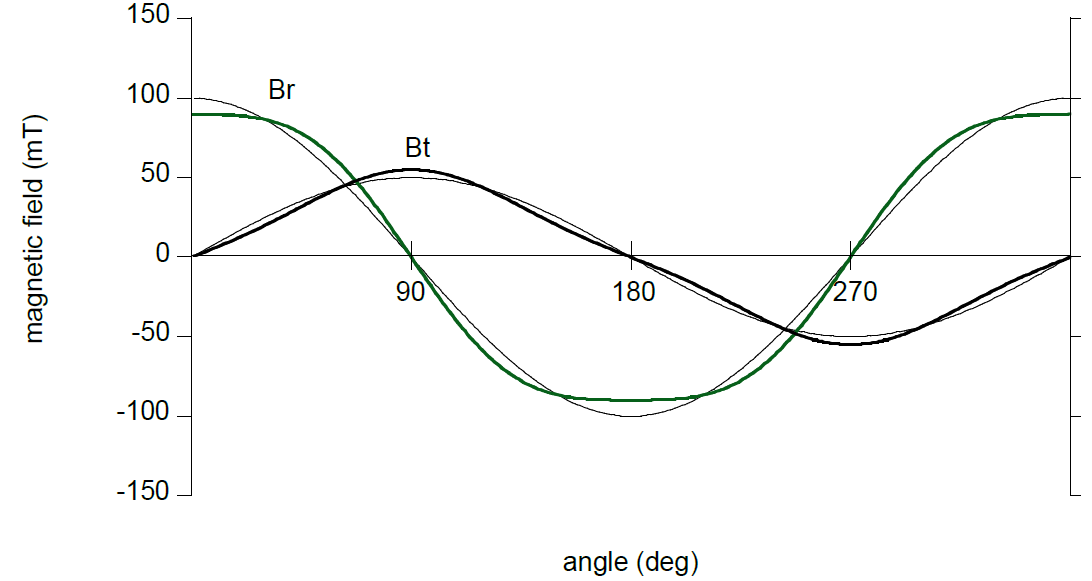
Figure 10 Third harmonic distortion of the radial and tangential field components
它采取第三次口音扭曲的形式:
美元是扭曲比率(我们假定两者的扭曲比率相同)。 如果美元小,则造成错误:
它基本上意味着一个错误,其二调幅为$D2 -$ 和$4th} 调幅为$frac {D%2} 2$。原则上,第二个调幅误差与椭圆误差具有相同的阶段,因此可以通过 BCT 裁剪来补偿。
3.2 由于应用领域不完善造成不统一
差异错误可能源于磁化装置内块的不完善定位( 或按键时的厌异磁体 ) 。 由于它的有限大小, H 字段线并不完全平行。 如果部件偏向外, 野外线的曲度是不对称的, 导致第一个调和错误 。 这影响到在任何侧形形状配置中的传感器读取 。
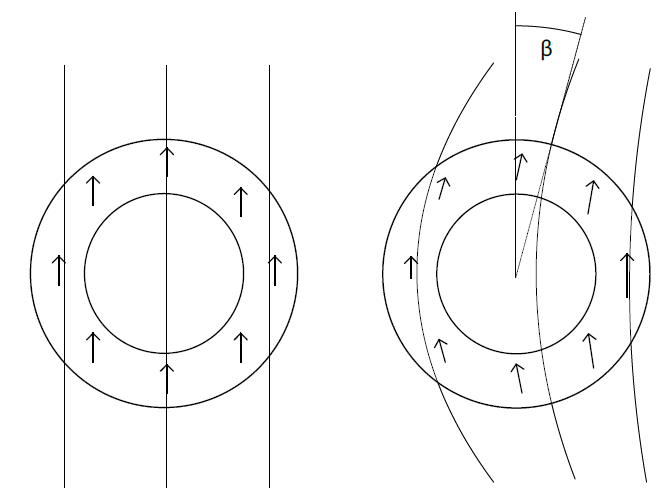
衡量这种不对称的一种方法就是记录半转半转与另一转半转之间的半转或偏转领域,并寻找不对称之处。图12由此产生的传感器错误是振幅 $ beeta$ 的第一个调音错误。
3.3 磁力倾斜
商业磁环或圆柱的磁化通常不严格地说是平面的(即旋转轴的垂直),相反,磁化矢量在轴向上可倾斜几度(每平米5度是常见的容度)。图13
磁化可被视为理想磁场与纯轴心扰动场的叠加,见图14。在侧环配置中,“轴磁”产生的磁场与死亡平面是垂直的,即没有测量。(图14)因此,磁化倾斜不影响侧环传感器的读取。对正弦或顶环配置则不如此。
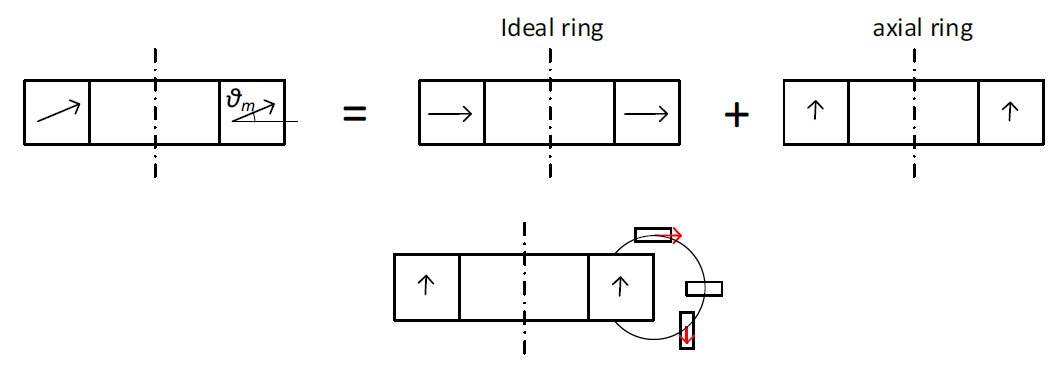
我们可以大致估计倾斜对正方形配置的影响。 轴环在传感器位置上创造了一个恒定场, 不论轴角如何。 最坏的错误发生在理想磁铁场在传感器位置上纯粹相近时: 在这种情况下, 寄生虫场与理想场是垂直的 :
在传感器接近磁力中高度且磁力高度小于磁力高度的限度内,这一误差可以由以下方式大致推算:
磁力倾斜就是一百万美元的美元。
从图14可以看出,从质量上看,一个大得多的错误将影响上环配置。
审核编辑:彭菁
-
角度传感器原理、技术与实用指南2025-11-04 856
-
线性霍尔效应传感器角度测量原理、实现和校准2024-09-23 1498
-
Magalpha 角度传感器在机器人技术中的应用2023-08-18 1689
-
角度传感器用例:电动自行车2023-08-02 1769
-
角度传感器的工作原理 角度传感器原理及应用2023-07-26 7188
-
角度传感器详解2022-03-09 6621
-
深入了解角度传感器2021-12-15 2956
-
角度传感器怎么接线_角度传感器作用2019-07-17 15331
-
剖析角度传感器的基本原理及应用2018-10-16 28077
-
有人会角度传感器的信号处理吗2016-05-24 5091
-
角度传感器怎么使用。2014-07-19 3586
-
角度传感器2013-08-06 4985
-
关于角度传感器!@_@2012-07-11 4079
-
角度传感器_什么是角度传感器2012-01-03 10576
全部0条评论

快来发表一下你的评论吧 !
