

工业机器人的发展现状和趋势(ABB为例)
机器人
描述
发展历程:工业机器人走向智能化/通用化发展
工业机器人的发展历程可以分为三个阶段: 技术萌芽阶段(20 世纪 50-60 年代,第一代工业机器人):第二次世界大战期间工业机器 人的雏形始成,其最初是出于军事、核工业的发展需要,用来满足代替人类进行放射性物 质处理的遥控机械手。此后,美国发明家乔治·德沃尔最早提出工业机器人的概念并于 1954 年申请“可编辑关节式转移物料装置”的专利。1958 年,世界上第一家机器人公司 Unimation 成立,并于 1959 年利用乔治·德沃尔的专利推出了世界上第一台真正意义上的工业机器人 Unimate,开创了机器人发展的新纪元。在此期间主要为第一代工业机器人,即没有自主决 策能力和环境感知能力的示教再现型机器人。
产业崛起阶段(20 世纪末期,第二代工业机器人):1968 年起,Unimation 先后将机器人 制造技术转让给日本川崎、英国 GKN 公司,工业机器人业务扩张到日本和欧洲,开始走向 产业化和全球化。1969 年,ASEA 公司研制出全球首台喷涂机器人,川崎成功推出了日本 第一台液压动力机器人“川崎 Unimate 2000”。此后,更多公司入局工业机器人领域,形 成了以 ABB、库卡为代表的欧洲机器人企业以及以川崎、发那科、安川为代表的日本机器 人企业格局,机器人市场稳步增长。在此期间,工业机器人从第一代发展到第二代,能够 感知外界信息并进行简单的处理和反馈。
产业升级阶段(21 世纪初期,第三代工业机器人):随着工业自动化的发展,工业机器人 不断拓展应用场景、发展核心技术。1)从应用场景来看,工业机器人能达到更快速度、更 高精准度,以及更大范围的大小型号和负载,实现在大型工件搬运生产、物流运输、食品 饮料、生物制药、汽车制造等更加广泛和智能的场景应用。2)从技术发展来看,工业机器 人核心技术得到快速发展。2002 年美国波士顿公司和日本公司共同申请了第一台“机械狗” 智能军用机器人专利;2004 年安川和 ABB 均开发了可以同步控制多台机器人的控制器; 2006 年意大利柯马公司推出了第一款无线示教器;2015 年 ABB 推出世界上第一台真正意 义上的协作机器人 YuMi。在此期间工业机器人进入第三代,具备智能化特点,可以利用各 种传感器、测量器获取信息并利用智能技术进行识别、理解和反馈。
工业机器人四大家族凭借在原有业务的领先优势和对机器人技术的高度掌握占据高位。以 ABB 的发展历程为例,公司成立于 1988 年,是由具有百年历史的两家著名电气公司—— 电气照明和发电机制造商 ASEA 和高压电气传输公司 BBC 合并而来,此后 ABB 成为了电 气和自动化领域的技术领导者,提供全面且日益数字化的电气化、运动和自动化解决方案。 在此基础之上,ABB 对业务结构进行调整,延续其前身 ASEA 公司在工业机器人领域的领 先布局,开始快速发展机器人业务,自 1974 年推出世界上第一台微电脑控制的机器人以来, ABB 不断取得突破性创新,不断完善工业机器人在产业链上的产品布局,并通过技术创新 提升性能。
市场现状:“四大家族”占据的稳增长市场
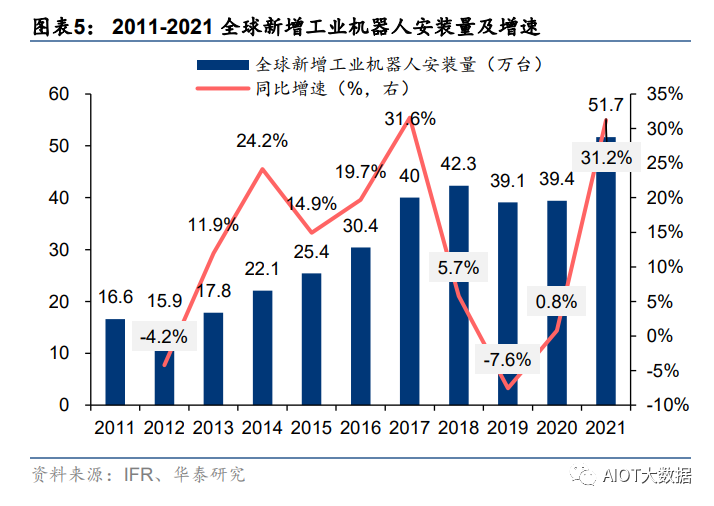
工业机器人市场规模稳步增长,全球新增装机量快速增长。根据 IFR 数据,2021 年全球新 增工业机器人安装量为 51.7 万台,同比增长 31.2%,2012-2021 年复合增长率为 12.0%。 根据 Inkwood Research 数据,未来全球工业机器人市场规模将保持稳定增长,从 2020 年 的 553.7 亿美元增长至 2028 年的 1653.5 亿美元,2021-2028 年复合增长率为 14.7%。
工业机器人市场集中度较高,以机器人“四大家族”为主。根据 IFR 数据,2020 年全球工 业机器人市场中,发那科、ABB、安川、库卡四家占比超过 65%,其中发那科排名第一占 比 17.3%,ABB 第二占比 15.7%,安川和库卡分别占比 12.9%和 12.1%。“四大家族”的 主要业务和在机器人领域的核心技术各不相同,安川和库卡以机器人业务为核心,而发那 科和 ABB 则分别起家于工厂自动化设备和电力业务。其中 ABB 的业务以电气、运动控制、 过程自动化、机器人与离散自动化为核心的,2022 年电气业务营收占比 47.9%,机器人与 自动化业务占比 10.8%。
驱动力:人口供给收缩和下游需求释放驱动行业增长
人口老龄化导致人力成本上升,机器替人为大势所趋。世界各国的生育率已连续多年下降, 据国家统计局,2021 年中国 15-64 岁人口占比已降至 68.3%。企业用人成本不断攀升,根 据国家统计局数据,2022 年中国制造业就业人员人均工资已达 86933 元,同比增长 5.2%, 高于 GDP 增速。劳动力成本上升的长期趋势将成为工业机器人产业发展的强大驱动力。
新能源汽车的爆发为工业机器人带来需求释放。由于新能源汽车的带动,汽车行业进入下 一轮扩张周期,工业机器人将持续受益。以中国为例,据同花顺数据,从 2021 年起新能源 汽车销量进入爆发式增长阶段,2023 年 6 月销量超过 80 万辆。 半导体、光伏、锂电等行业也有望带来大量工业机器人需求。汽车与 3C 电子是工业机器人 需求量最大的两个行业,如今 3C 电子需求相对疲软,大部分企业开始积极探索汽车和 3C 之外的业绩增长点,如半导体、光伏、锂电等。2022 年全球半导体市场规模达 5735 亿美 元,随着 AI 带动算力芯片设计、制造、封装等产业需求,半导体扩产有望带动工业机器人 建设需求。
IT 架构是智能化核心,软件重要性有望逐步提升
工业机器人产业链:可分为上游核心零部件、中游机器人本体及软件以及下游系统集成及 应用三个环节。上游核心零部件包括传感器、控制器、减速器、伺服系统,传感器主要分 为内部传感器和外部传感器,伺服系统主要包括伺服驱动器和伺服电机两个部件;中游包 括机器人本体制造及配套软件产品;下游包括系统集成及应用,系统集成即将各种机器人、 传感器、控制器、软件等组合以形成一个完整的自动化生产线,工业机器人应用覆盖广泛, 其中主要应用领域为汽车制造、电子电气、食品制造、金属加工及制药行业等。
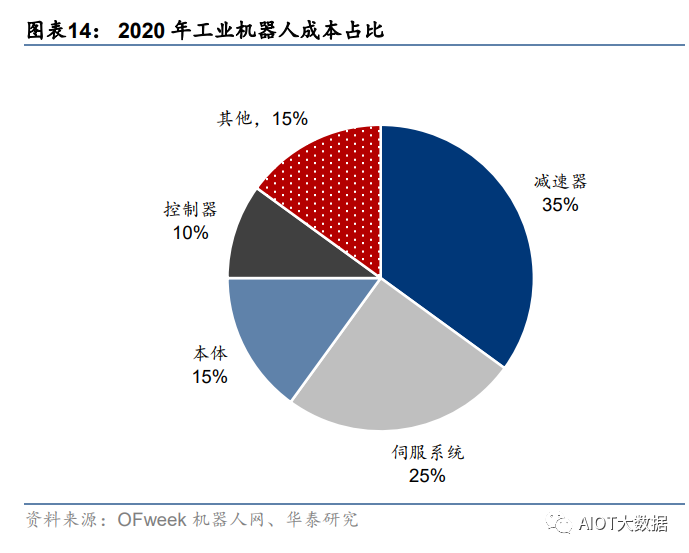
上游核心零部件为工业机器人主要成本来源,盈利能力强劲。从成本来看,2020 年工业机 器人 60%的成本由上游核心零部件构成,其中减速器、伺服系统、控制器分别占比 35%、 25%、10%,机器人本体仅占比 15%。从毛利率来看,盈利能力较强的环节主要集中在上 游核心零部件,2020 年减速器、伺服系统、控制器的毛利率分别约为 40%、35%和 25%, 中游本体制造毛利率较低仅 15%,下游系统集成毛利率较高为 35%。
以 ABB 为例,按照具体功能结构,我们可以将工业机器人核心部件归纳为:感知层、执行 层、决策层。具体来看:
感知层:工业机器人的信息最初来源
传感器是机器人的“感知器官”,是机器人实现与环境交互及精准运动的信息来源。传感器 用来感应和采集各种信息,并按照一定规律将被测量的信息转化成便于传输和处理的有用 信号。传感器通常由敏感元件和转换元件组成,其中敏感元件是指传感器中直接感应被测 量的部分,转换元件是指传感器能将敏感元件的输出转换为适于传输和处理的电信号部分。 传感器一般分为内部和外部传感器,内部传感器主要测量机器人内部系统状态,如温度、 转速、电压等;外部传感器主要测量外界环境的信息,包括位置传感器、速度传感器、力 传感器、视觉传感器等。
机器人传感器市场规模稳步增长,市场集中度较低。根据 Mordor Intelligence 预测,全球 机器人传感器市场规模预计将从 2023 年的 6.16 亿美元升至 2028 年的 9.24 亿美元, 2024-2028 年 CAGR 为 8.4%。机器人传感器市场主要参与者来自全球不同国家的众多企 业,包括瑞士宝盟集团、泰科电子;美国 ATI、Tekscan、Futek、森萨塔、霍尼韦尔;日本 发那科、TDK、欧姆龙集团等。
力传感器是工业机器人的重要传感器,ABB 集成力控技术是力传感器主要技术之一。工业 机器人大多为机械臂形态,由机器人的动力关节和连接杆件组成,力传感器可以对机械臂 上的力度进行实时监控并进行反馈。随着机器人向智能化发展,对与外界交互的柔顺控制 需求更高,对力控技术提出了更高的要求。为了提高传感器的灵活度和精度,2014 年 ABB 成功开发了集成力控技术,基于此技术,ABB 提供 3 种集成式力控传感器,兼容其 IRB 140 到 IRB 6700 的大部分工业机器人。配备该技术的机器人能根据外部实时回馈信号应对制造 过程中的细微变化,像人类一样拿捏易碎物品或执行精密作业,编程时间也可缩短。
执行层:决定工业机器人实际运动的准确度
机器人的“肌肉”——伺服系统
伺服系统是机器人的“肌肉”,是一种自动控制系统,能够精确地跟随或复现某个过程。伺 服系统由驱动器、驱动电机、伺服编码器及配套软件组成。伺服驱动器控制伺服电机,其 作用是将控制信号转换为电机运动的驱动信号,一般通过位置、速度和力矩三种方式对伺 服电机进行控制,实现高精度的传动系统定位。伺服电机是控制机械元件进行运转的发动 机,接收到伺服驱动器的驱动信号后,将电能转化为机械能,即将电压信号转化为转矩和 转速以驱动控制对象。伺服编码器一般安装在伺服电机末端,用于测量转角及转速,是伺 服系统的信号反馈装置,对伺服系统的精度有着关节作用。
ABB 伺服驱动器及伺服电机产品性能优越,覆盖电压及功率范围较大。ABB 的伺服驱动器 能满足大部分电压范围应用场合,定位精度较高。MicroFlex e190 和 MotiFlex e180 高度 集成了以太网的灵活连接和电机反馈技术,并针对要求苛刻的运动应用进行优化。ABB 伺 服电机也同样拥有完整的产品系列,功率覆盖范围满足大部分应用场合,高转速及高转矩 满足能够实现高动态响应及精准控制。
ABB 为其伺服产品提供了专门的选型和调试工具。Servosize 是针对 ABB 伺服产品的选型 工具,支持的产品有 MotiFlexe180、MicroFlexe190 和 E530 伺服驱动器以及 eSM、DSM 和 HDS 伺服电机。MintWorkbench、ServoComposer 和 AutomationBuilder 是针对 ABB 产品的编程和调试工具。MintWorkbench 可用于 MotiFlexe180 和 MicroFlexe190 伺服驱动 器的编程和调试,ServoComposer 可用于 E530 伺服驱动器的调试,而 AutomationBuilder 则可用于运动控制 PLC 的编程和调试。
机器人的“关节”——减速器
减速器机器人的“关节”,是连接伺服电机和执行机构的中间装置。减速器通过齿轮啮合将 伺服电机高转速的动力转化为低转速、高转矩的机械运动传递到执行机构上,起到匹配转 速和传递转矩的作用。减速器的输出转速、传动精度、输出转矩等决定了对应运动轴的运 动速度、定位精度和承载能力。一般来说,工业机器人的每一个关节都需要搭配一个减速 器,工业机器人大多为六轴,故一般一台工业机器人需要六个减速器。减速器可以分为谐 波减速器和 RV 减速器,谐波减速器使用简单、精度较高,但结构刚性不及 RV 减速器,日 本哈莫纳科为全球最大谐波减速器生产商;RV 减速器结构刚性较好、输出转矩大,但其内 部结构较为复杂、制造成本高、传动精度略低,日本纳博特斯克为全球最大 RV 减速器生产 商。
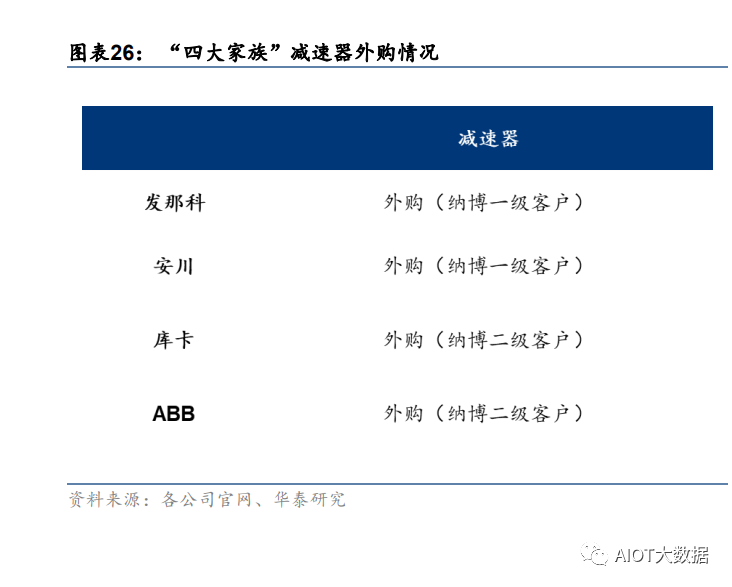
工业机器人企业减速器自产程度较低,大多采取外购。减速器市场集中程度较高,据哈工 大 2021 年发布的《中国机器人产业发展报告》,日本哈默纳科、纳博特斯克和住友占据了 85%的份额,其中纳博特斯克是 RV 减速器的发明者,占据全球工业机器人减速器市场的 60%,并在以及数控机床自动换刀(ATC)装置的 RV 减速器市场占比 80%,工业机器人 四大家族减速器自产能力较弱,均外购纳博特斯克的减速器。日本哈默纳科是全球最早研 发生产谐波减速器的企业,减速器市场占比第二位 15%。
决策层:决定工业机器人性能的关键
控制器在机器人结构中承担“小脑”的作用,是决定机器人性能的主要因素。控制器接收 传感信息并据此生成对应的控制指令,控制机器人完成动作任务。控制器包括硬件和软件 两部分,硬件为控制计算机和示教器,其中示教器是进行机器人手动操纵及配置与编程的 手持装置;软件主要为以控制算法为核心的运用软件和系统。控制器的工作原理是将检测 单元的输入信号与设定值信号进行比较,并对偏差信号进行运算,然后将运算结果输出到 执行器,又执行器改变操纵变量再输出到被控对象。
以 ABB 为例,OmniCore 工业机器人控制器为工业机器人提供强劲性能。其中 C 系列是 OmniCore 家族的紧凑型控制器,不仅在尺寸上大大减小,而且具备灵活的集成能力;E 系列是超紧凑控制器,旨在满足客户运行紧凑电子产品装配线的需要;V 系列(特韧型)是 模块化 OmniCore 控制器系列中的中型控制器,主要面向工业环境中的中型和大型机器人 进行优化,例如 MH/MT、弧焊。
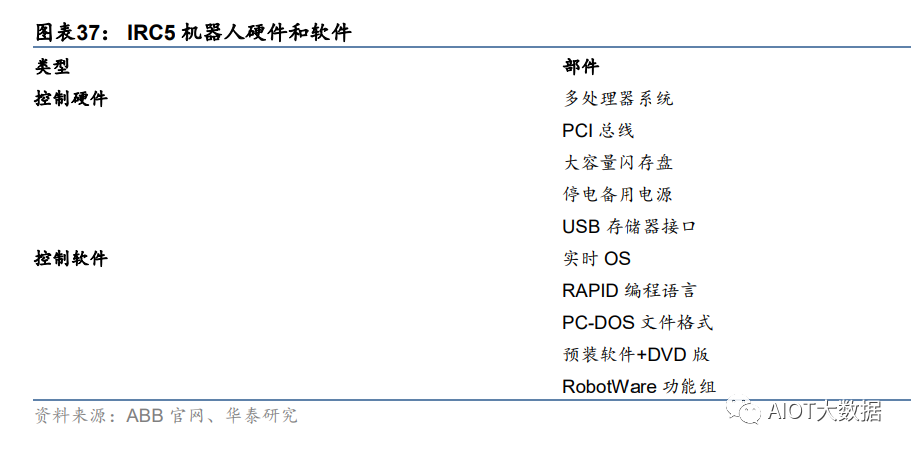
ABB 的 IRC5 是机器人控制器技术的行业标杆。ABB IRC5 控制器包含单柜型、双柜型和 紧凑型,其中单柜型 IRC5 由控制器和 FlexPendant 示教器两个硬件部分组成。使用者可以 在 FlexPendant 示教器或 FlexPendant 示教器上的 RobotStudio 上对机器人进行编程。此 外,IRC5 采取灵活的模块化分布设计。模块化分布设计较集中式控制器更为灵活,IRC5 由控制模块和驱动模块组成,可选增过程模块,使得 IRC5 可以灵活控制一台六轴机器人和 伺服驱动工件定位器。其中,控制模块自带主计算机,能够执行高级控制算法,为多达 36 个伺服轴进行复合路径计算,并可指挥四个驱动模块。此外,IRC5 还提供灵活性、安全性、 模块化、应用程序接口、多机器人控制和 PC 工具支持。
ABB 控制器由其优越的运动控制技术支持。QuickMove、TrueMove 和 MultiMove 是 ABB 的核心运动控制技术,它们对于机器人的精度、速度、周期时间、可编程性以及与外部设 备同步性等机器人性能指标的提升起到了重要作用。TrueMove 保证了机器人的路径精度, 能够确保不论速度或运行模式如何,甚至是在安全保护停止、进程停止、程序停止或断电 后,机器人的运动路径也会遵循编程路径;QuickMove 则能够在短时间内实现运动控制, 可以根据不同的工作任务自动优化轴的加速度和速度,从而实现更高效、更精准的运动控 制,提高机器人的生产效率和精度,循环速度比竞争对手快 25%;MultiMove 的引入进一 步巩固了 ABB 在先进机器人系统和功能方面的领先地位,可以确保多达 4 台机器人协同运 行。
贝加莱控制系统为 ABB 机器人提供强大集成架构。据公司官网,2017 年 4 月 ABB 宣布收 购贝加莱,贝加莱在工业软件行业处于领先地位,是 PLC、工业 PC 机、伺服系统控制的 真正领导者,其拥有完整的集成架构。2019 年,ABB 和贝加莱联合开发了一种将 ABB 机 器人集成到贝加莱机器控制系统中的解决方案。该方案简化了机器人的编程,实现工作台 和机器人的并行工作、提高了机器人运动和传感器的同步、实现对机器人的仿真模拟,使 开发更加便捷。
IT 架构:软件地位有望逐步提升
以 ABB 为例,工业机器人 IT 架构是决策系统的底座。在工业机器人的决策系统中,我们 看到控制器起到了调度机器人行为、执行复杂指令的重要作用。拆解决策系统来看,底层 的基础控制硬件和控制软件,是工业机器人 IT 架构中的核心底座。
硬件:主控设备由 DSQC1000 主计算机等核心硬件构成。单柜型 IRC5 搭载 DSQC1000 主计算机,是整个控制器的大脑,用来接收机器人运动数据和外围信号,并将信号发送到 各单元;轴计算机接收机器人轴串行测量板返回的位置数据,并与原来的位置数据进行比 较和运算输出新的位置和速度控制参数;主伺服驱动器用来驱动分布在机器人 6 个轴上的 伺服电机;I/O 模块用来连接外部信号,是用户自定义的输入、输出信号板;安全面板用来 连接安全相关的信号,正常工作时 LED 灯保持点亮。
软件:一般由操作系统和算法库构成。操作系统主要包括 VxWor(嵌入式实时操作系统) 及使用较多的开源操作系统 Windows CE、嵌入式 Linux、嵌入式 Linux、μC/OS-Ⅱ以及 通用 ROS 平台。其中算法库包括底层算法库和应用工艺算法库,底层算法库是直接在计算 机操作系统上开发出的算法,控制算法用来规划机器人的运动点位,动力学算法用来识别 机身负载物的转动惯量;应用工艺算法库是软件使用人员二次开发的算法。RobotWare 是 ABB 嵌入式工业机器人控制器专用软件系列,用于控制 ABB 公司生产的各种工业机器人。 所含选购插件可为机器人用户提供一系列丰富系统功能,如多任务并行、对机器人传输文 件信息、外部系统通信、先进运动任务等。
ABB 还提供各种针对不同应用场景下不同功能的软件包。包括喷涂软件包、上下料软件包、 拾料软件包、机加工软件包、切割软件包、码垛软件包、PickMaster 拣选包装软件包等。 为焊接、切割、拾料、码垛等专门环节提供了定制化的软件服务,提高特定生产环节的工 作效率。
此外,工业机器人的编程方法一般包括示教编程和虚拟仿真编程。示教编程需要由操作者 对机器人进行逐步的作业引导,通过示教器操作告知机器人需要完成的动作,示教操作完 成后即生成程序,机器人即可按照生成的程序复现全部示教动作,适用于自动生产线等重 复作业机器人。虚拟仿真编程是通过编程软件实现编程和仿真两个功能,不仅可以编写程 序,还可以对机器人运动进行模拟仿真以验证程序有效性。虚拟仿真编程需要配备机器人 厂家专门的编程软件,例如 ABB 的 Robot Studio。 Robot Studio 是 ABB 机器人仿真和编程软件,一方面提供可视化编程环境是机器人编程 更加灵活高效,另一方面强大的仿真功能可以帮助用户进行机器人应用程序的开发和测试。 2023 年 1 月,ABB 通过云功能增强了其 RobotStudio 机器人编程和仿真软件,新的 RobotStudio Cloud 使个人和团队能够在任何设备上远程实时协作进行机器人单元设计。
IT 架构:软件地位有望逐步提升。我们认为,随着工业机器人向智能化发展,已经逐步进 入软件定义阶段,机器人不再是一个机械制造品(迭代慢/软硬高度耦合),而逐步演化为 IT 产品(迭代快速/软硬解耦)。不论是操作系统、算法库、还是编程开发软件,在机器人迭代 过程中,正扮演着越来越重要的角色,软件算法的差异将对机器人最终能够实现的智能化 水平产生重要影响。基于此,我们看好机器人产业变革下,IT 软件发展机遇,软件地位有 望逐步提升。
AI 赋能有望助力产业变革加速到来
产业趋势:工业机器人正在向具身智能演进
ChatGPT 将人类从机器人流程中的 in-the-loop 变为 on-the-loop。目前,机器人 pipeline (流程)需要一个专门的工程师 in-the-loop 编写代码来改进流程。而 ChatGPT 的引入,可 以替代人类在循环中的位置,人类(技术或非技术均可)用户可以以 on-the-loop 的形式, 通过高级语言命令与语言模型交互,实现无缝部署各种平台和任务。
人类用户在机器人 pipeline 中评估 ChatGPT 输出的质量和安全性。人类在机器人 pipeline 中的任务主要包括:1)定义高级机器人函数库。高级机器人函数库(high-level robot function library)一方面面向机器人平台,能够调用和指导机器人相关动作;另一方面面向 ChatGPT, 保证库中函数的命名应能便于 ChatGPT 理解和遵循。2)构建 prompt。Pompt 描述任务目 标,并标识允许 ChatGPT 使用的高级函数库中的函数。此外,还可以包括约束信息,或者 告知 ChatGPT 如何组织其响应。3)分析评估 ChatGPT 输出结果并反馈。用户以 on-the-loop 的形式,通过直接分析或模拟来评估 ChatGPT 输出的代码,并就输出代码的质量和安全性 向 ChatGPT 提供反馈。4)迭代。不断迭代 chatgpt 生成的结果直到符合人类预期,并确 保最终的代码可以部署到机器人上执行。
简单任务:ChatGPT 能够以 zero-shot 的方式解决简单的机器人任务。对于简单的机器人 任务,用户只需提供 prompt 和函数库描述,不需要提供具体的代码示例,ChatGPT 即可 zero-shot 解决时空推理、控制真实无人机和无人机工业检测等问题。1)时空推理:要求 ChatGPT 控制一个平面机器人,用视觉伺服捕捉篮球位置。2)真实世界无人机飞行:使 用 ChatGPT 和 API 控制一个真实的无人机,完成物体寻找任务。3)AirSim 工业检测:基 于 AirSim 模拟器,利用 ChatGPT 控制模拟域无人机进行工业巡检。
复杂任务:在人类用户 on-the-loop 交互下,ChatGPT 能够完成更复杂的机器人控制任务。 对于更复杂的问题,ChatGPT 没法 zero-shot 完成或者完成效果有限,此时人类用户可以 以文本反馈交互的方式辅助 ChatGPT,完成课程学习、AirSim 避障等任务。1)课程学习: 教授 ChatGPT 简单的拾取和放置物体技能,并将所学会的技能按逻辑组合用于更复杂的区 块排列任务。2)AirSim 避障:ChatGPT 构建了避障算法的大部分关键模块,但仍需要人 工反馈无人机朝向等部分信息。人工反馈均是高级的自然语言,但 ChatGPT 能够理解并在 适当的位置进行代码修正。
落地情况:ABB 等头部厂商积极拥抱产业变化
工业机器人领域 AI 应用还处于探索阶段,赋能部分智能识别和智能编程环节。以 ABB 为 例,通过其人工智能机器人物品拣选器赋能电商物流领域。根据 Statista 的数据,未来五年 内全球电子商务收入预计将增长 50%以上,从 2019 年的 1.7 万亿欧元增至 2024 年的 2.6 万亿欧元。ABB 积极发掘人工智能机器人解决方案在物流、仓储、包裹和邮件分拣等广泛 应用中的巨大机遇,据公司官网,2020 年 2 月公司和硅谷人工智能初创公司 Covariant 宣 布建立合作伙伴关系,将人工智能机器人解决方案推向市场。Covariant 的协变大脑是一种 通用人工智能,它允许机器人在周围的世界中观察、推理和行动,完成对于传统编程机器 人来说过于复杂和多样化的任务。Covariant 的软件使机器人能够进行强化学习:通过反复 试验自行适应新任务,从而不断扩大它们可以挑选的物体范围。ABB 和 Covariant AI 支 持解决方案在 Active Ants 首次部署,该公司是荷兰电商服务领先提供商。
AI 和机器视觉提升赋予机器人人类灵巧性,提升拣选智能识别效率和拣选速度。据公司官 网,2023 年 4 月 25 日,ABB 通过推出基于人工智能和视觉可以在仓库和履行中心的非结 构化环境中准确检测和拣选物品,大大提高拣选速度和精准度。使用机器视觉和人工智能, 物品拾取器可以在吸力夹具拾取物品并将其放入指定的箱子之前确定每个物品的最佳抓取 点。该系统不需要任何人工监督或有关其挑选的物品的物理属性的信息,能够在动态和非 结构化环境中处理各种物品,并通过 ABB 视觉系统实现高精度拣选,准确度超过 99.5%, 每小时可拾取多达 1,400 个未分类的物品。该产品目前适用于各种负载和应用,可安装到 三种 ABB 机器人之一 - IRB1200、IRB 1300 和 IRB 2600。
ABB 与微软合作,利用生成式 AI 赋能工业分析。据公司官网,2023 年 7 月 5 日,ABB 与 微软合作将生成式 AI 功能整合到工业数字化解决方案中,本次合作旨在通过部署 Copilot 功能,使 ABB Ability Genix 工业分析和 AI 套件及其应用可以进行更直观的用户交互,进一 步发挥关联数据的价值,从而提升效率和可持续发展性。ABB Ability Genix 是一个综合性 的模块化工业物联网、分析和 AI 平台。ABB 将通过 Azure OpenAI 服务,包括 GPT-4 等大 型语言模型(LLM)将生成式 AI 整合到 Genix 平台和应用中,实现代码、图像和文本生成等 功能。新的 Genix Copilot 应用将提供直观的功能并简化各个流程和运营的关联数据流来增 强用户体验。通过为行业管理人员、职能专家和车间工程师提供实时的可执行洞见,改善 决策质量并提高生产力。据 ABB,此类洞见有望将资产生命周期延长高达 20%,并将意外 停机时间减少多达 60%。
编辑:黄飞
-
机器人谐波减速器的发展现状与趋势2024-11-29 1537
-
医疗机器人发展现状与趋势2024-10-21 7903
-
abb工业机器人的编程语言是什么2024-06-16 7742
-
工业机器人的发展现状和趋势2023-04-19 9699
-
汽车用基础电子元器件发展现状与趋势是什么?2021-05-17 4245
-
喷涂机器人的发展趋势2021-03-10 3188
-
多轴机器人的发展趋势2020-07-29 7538
-
工业机器人的发展趋势如何?2020-03-27 3613
-
零基础玩转工业机器人2018-10-29 5066
-
视觉机器人的发展现状与趋势2016-09-08 5488
-
工业机器人应用趋势和市场前景2016-03-09 3506
-
全球机器人发展现状2016-01-28 4269
-
ABB工业机器人的基础教课2015-12-23 1747
-
中国工业机器人行业发展和未来趋势分析2015-04-25 3036
全部0条评论

快来发表一下你的评论吧 !
