

工业机器人应该有几个轴才合理呢?
机器人
描述
近年来,跨国机器人巨头们纷纷推出七轴工业机器人,以抢占高端新市场,这引发了我们对于七轴工业机器人的深入思考,它具有哪些独特的技术优势,存在哪些研发难点,近年来国际上发布了哪些工业七轴机器人产品,我国七轴工业机器人的研发及产业化又进入了哪一阶段?
工业机器人到底应该有几个轴?
目前,工业机器人已经被广泛应用于各行各业,但我们也发现,工业机器人不仅形状各异,其轴数也各不相同。所谓工业机器人的轴,可以用专业的名词自由度来解释,如果机器人具有三个自由度,那么它可以沿x,y,z轴自由的运动,但是它却不能倾斜或者转动。当机器人的轴数增加,对机器人而言,就是更高的灵活性。那么工业机器人应该有几个轴才合理呢?
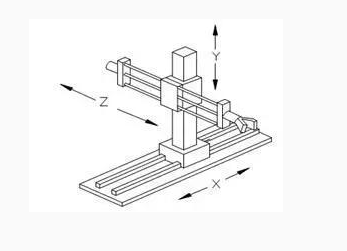
三轴机器人也被称为直角坐标或者笛卡尔机器人,它的三个轴可以允许机器人沿三个轴的方向进行运动,这种机器人一般被用于简单的搬运工作之中。
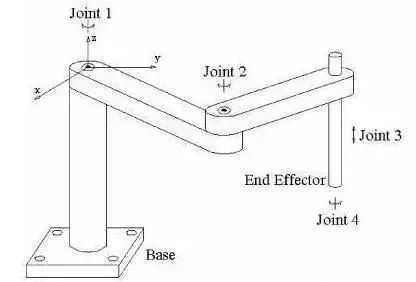
四轴机器人,可以沿着x,y,z轴进行转动,与三轴机器人不同的是,它具有一个独立运动的第四轴,一般来说SCARA机器人就可以被认为是四轴机器人。
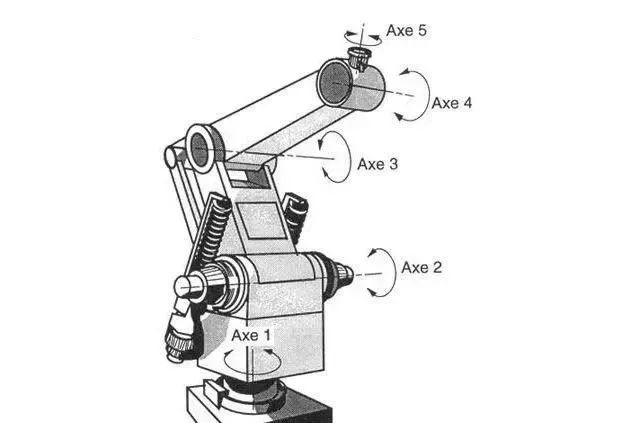
五轴是许多工业机器人的配置,这些机器人可以通过x,y,z三个空间周进行转动,同时可以依靠基座上的轴实现转身的动作,以及手部可以灵活转动的轴,增加了其灵活性。
六轴机器人可以穿过x,y,z轴,同时每个轴可以独立转动,与五轴机器人的最大区别就是,多了一个可以自由转动的轴。六轴机器人的代表就是优傲机器人,通过机器人身上的蓝色盖子,你可以很清楚的计算出机器人的轴数。
七轴机器人,又称为冗余机器人,相比六轴机器人额外的轴允许机器人躲避某些特定的目标,便于末端执行器到达特定的位置,可以更加灵活的适应某些特殊工作环境。
随着轴数的增加,机器人的灵活性也随之增长。但是,在目前的工业应用中,用得最多的是三轴、四轴和六轴的工业机器人,这是因为,在某些应用中,并不需要很高的灵活性,而三轴和四轴机器人具有更高的成本效益,并且三轴和四轴机器人在速度上也具有很大的优势。
未来,在需要高灵活性的3C产业,七轴工业机器人将拥有用武之地,随着其精度不断增加,在不远的将来,它将取代人工进行装配手机等精密电子产品。
七轴工业机器人比六轴工业机器人
强在哪?
从技术上来看,六轴工业机器人存在什么问题,七轴工业机器人又强在哪?
(1)改善运动学特性
在机器人的运动学问题中,三个问题使得机器人的运动受到非常大的限制。
第一是奇异构型。当机器人处于奇异构型时,它的末端执行器不能绕某个方向进行运动,或者施加力矩,因而奇异构型极大的影响了运动规划。
第二是关节位移超限。在真实工作情况下,机器人每个关节的运动的角度范围是受到限制的,最理想的状态是正负180度,但是很多关节是做不到的。另外,七轴机器人可以避免角速度运动过快,让角速度分配得比较均匀。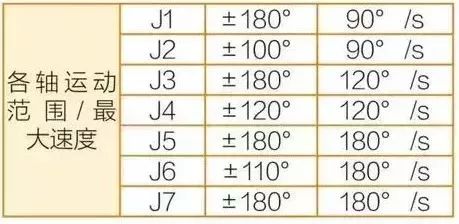
新松七轴机器人各轴运动范围及最大角速度
第三是工作环境中存在障碍。在工业环境下,很多场合存在各种环境障碍,传统的六轴机器人无法只改变末端机构的姿态,而不改变末端机构的位置。
(2)改善动力学特性
对于七轴机器人而言,利用其冗余自由度不仅可以通过运动轨迹规划达到良好的运动学特性,并且我们可以利用其结构实现最佳的动力学性能。
七轴机器人可实现关节力矩的再分配,这里涉及到机器人的静力平衡的问题,也就是说,作用在末端的力,通过一定的算法算出每个关节承受的力有多大。
对于传 统的六轴机器人来说,其每个关节的力是一定的,它的分配可能很不合理。但是对于七轴机器人来说,我们可以通过控制算法调整各个关节的力矩,让薄弱的环节承 受的力矩尽量小,是整个机器人的力矩分配比较均匀,更加合理。
(3) 容错性
机器人在发生故障时,如果有一关节失效,传统六轴机器人便无法继续完成工作,而七轴机器人可以通过重新调整故障关节速度(运动学容错)和故障关节力矩(动力学容错)的再分配实现继续正常工作。
无论从产品角度,还是从应用角度,七轴工业机器人目前都还处于初步发展阶段,但各大厂商纷纷在各大展览会力推相关产品,可以想见对其未来的发展潜力还是十分看好的。
审核编辑:刘清
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 3971
-
工业机器人应该有几个轴才合理呢?2023-08-01 1661
-
机器人是什么?2022-03-31 22291
-
工业机器人可分为哪几种2021-09-07 2925
-
四轴机器人与六轴机器人的区别2021-08-26 15714
-
工业机器人应用编程考核设备分享2021-07-01 2886
-
多轴机器人的发展趋势2020-07-29 7494
-
一个机器人进行自动化升级改造,应该加一些什么设备呢?2020-06-12 4282
-
工业机器人应用广泛2017-09-07 3745
-
六轴工业机器人控制方式2017-08-09 6159
-
六轴工业机器人的主要特点2017-08-08 6672
-
智能家用机器人到底是个啥?2015-06-17 7403
-
工业机器人的基本结构2015-01-19 9519
全部0条评论

快来发表一下你的评论吧 !
