

基于使用振动的触觉反馈技术的运用可能性
电子说
描述
和偏心马达的不同之处?超薄型Piezo(压电)触觉反馈设备
"PiezoHapt™执行器"是使用了振动的触觉反馈技术及触觉反馈等,扩大了VR可运用性的薄型振动模块
触觉反馈技术(Haptics)是指通过力度及振动等皮肤感觉反馈传递信息的技术。
"虚拟现实(VR)"这个词语已耳熟能详,VR要求通过接触的感觉等触觉,而非视觉或听觉来传递信息的"触觉反馈技术"。
TDK的 PiezoHapt™执行器是由积层压电器件与振动板构成的薄型振动模块,虽然其通过低电压驱动,但可应对各类振动形式。与以往用于应对设备振动的偏心马达或线性执行器(线性振动器)相比,本产品没有安装限制,可用于各类需要通过皮肤感觉进行反馈的应用。
降低耗电量的同时实现高效振动的PiezoHapt™执行器的原理与结构
PiezoHapt™执行器是将两面安装有电极的陶瓷压电器件贴合在金属板一面的单晶结构执行器。向电极中施加交流电压时,压电器件会发生伸缩,因此会使粘接的金属板发生弯曲。其表现如下图所示。通过交互变化附加电压,金属板会反复发生凸起、陷下弯曲,从而产生振动。通过采用该单晶结构可使整体金属板高效振动。

压电器件拥有单板与积层两种形式,但PiezoHapt™执行器的压电器件为积层型,因此与相同厚度的单板型器件相比,可产生更大的位移。为此,相比需要高电压的普通压电式触觉反馈技术,TDK的PiezoHapt™执行器可通过24V的低电压将振动感觉传递给皮肤。
同时,由于无需使用金属线对器件进行焊接接合,因此无需对积层器件产生负荷便可提高振幅效率。
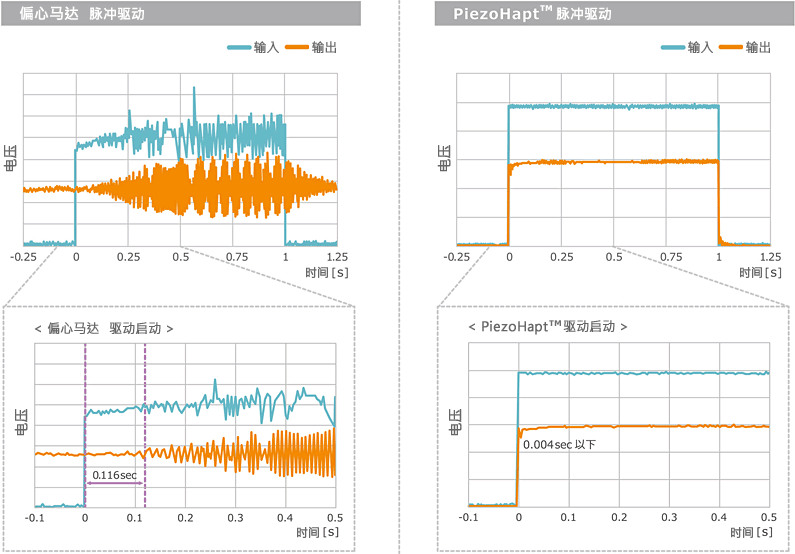
启动速度为偏心马达的1/25,同时可应对现有执行器所无法应对的多种振动形式
耗电量少于偏心马达,可实时表现出细腻的振动
偏心马达或线性执行器一般是用于振动器的执行器。但是,这些产品都存在响应速度慢的缺点。例如,在制造用手碰触显示器时能够感受到凹凸感的设备时,其响应速度必须比现有执行器快。为此,实现更为先进的触觉反馈技术仍面临不少课题。
TDK的PiezoHapt™执行器可通过压电特性实现瞬间响应。以下图表为偏心马达与PiezoHapt™驱动的比较。偏心马达启动需0.1秒以上,而PiezoHapt™执行器的启动速度仅为其1/25。
同时,由于PiezoHapt™执行器相比偏心马达可通过短时间通电进行运行,因此耗电量较少也是其特点之一。输入的频率或电压越高,耗电量也会变大,但通过优化形成的振动可实现省电。
如以下图表所示,可通过驱动电压改变振幅的PiezoHapt™执行器可细腻地表现多种振动形式。
这是通过设计决定振幅的偏心马达所无法实现的。
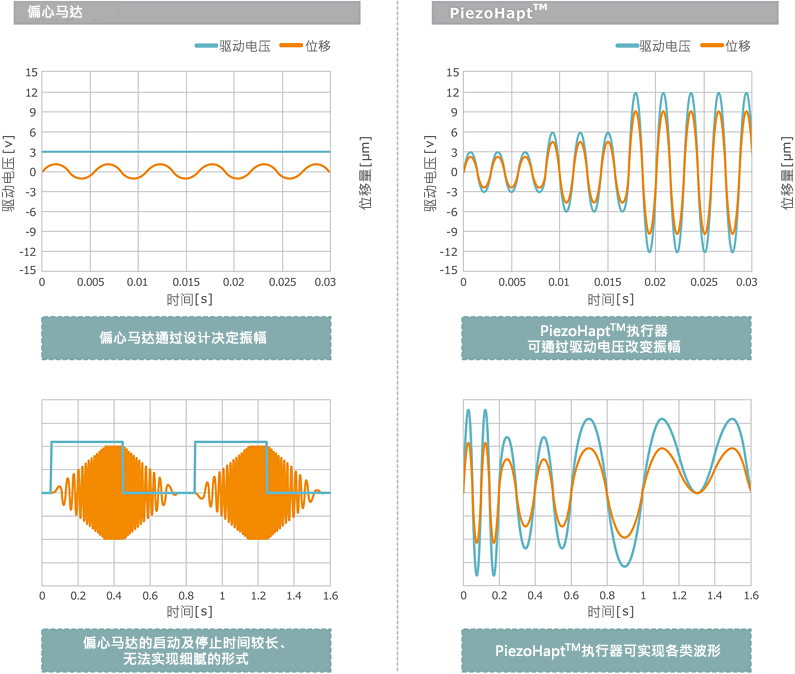
通过如此的快速响应以及振幅的自由变化,PiezoHapt™执行器可通过各种形式或位移形成对指尖的振动反馈,从而扩大触觉反馈运用的可能性。
即使是远离的部位,PiezoHapt™执行器也可将振动均匀传递
偏心马达很难将振动传递至远离安装位置的部位,但PiezoHapt™ 执行器可将振动均匀传递至整体。利用这一特点,可将强烈的振动传递至整个显示器或触摸屏。以下动画所示为振动分布,从中可以发现,不仅是PiezoHapt™ 执行器安装位置周围,其还可传递至更广的范围。除了形成均匀振动以外,其还能检测碰触指尖位置,并根据该位置改变振动。
偏心马达
PiezoHapt™执行器
偏心马达与TDK PiezoHapt™执行器的比较
下表为比较结果的总结。驱动电压较高是压电式的难点所在,但TDK的PiezoHapt™执行器通过使用积层器件克服了这一难点,由此实现了偏心马达所无法实现的功能,并且进一步扩大了使用振动的触觉反馈技术的运用可能性。
| 偏心马达 | TDK PiezoHapt™执行器 | |
|---|---|---|
| 启动* | 0.116秒 | 0.004秒以下 |
| 响应 | 慢 | 快 |
| 振动均匀性 | 传递部分振动 | 使希望振动的区域均匀振动 |
| 位移 | 中 | 大 |
| 振动形式 | 单调 | 通过脉冲控制形成振动 |
| 耗电量 | 15mWs | 5mWs |
*由TDK测量
主要用途
无论在何种领域,可用于穿戴设备、触摸板、屏幕、 控制器等需要通过触觉反馈技术进行反馈的各类设备中。
审核编辑:彭菁
-
 jf_07406703
2024-08-21
0 回复 举报这个振动加速度可以仿真吗? 收起回复
jf_07406703
2024-08-21
0 回复 举报这个振动加速度可以仿真吗? 收起回复
-
太阳诱电触觉技术和音响用压电振动片2025-04-09 853
-
触觉反馈技术的功耗分析2024-08-31 520
-
持续进化的触觉感知,压电振动技术迎来更广阔的应用空间2023-12-08 2876
-
什么是触觉反馈技术?2023-10-18 5934
-
压电振动元件实现无限可能的触觉效果2023-06-27 2404
-
具有触觉反馈功能的全新触摸屏TI Designs参考设计2022-11-18 734
-
不同驱动技术下的触觉反馈2022-07-07 5612
-
对比三大主流触觉反馈技术:ERM、LRA、压电2020-07-09 7968
-
触觉反馈技术是什么2019-07-18 4774
-
在触摸式用户界面中实现触觉技术2018-11-12 1794
-
触觉反馈:未来网购能看也能“摸”?2018-11-07 2306
-
触觉反馈技术:逼真震动体验的改革者2018-09-26 3039
-
利用触觉反馈模拟触摸感受2018-09-11 3001
-
触摸面板的触觉反馈技术2010-07-02 1657
全部0条评论

快来发表一下你的评论吧 !
