

基于SMA7029M的步进电机驱动设计
控制/MCU
描述
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
1 步进电机特点及驱动
步进电机受脉冲电流控制,每输入一个脉冲电机转轴步进一个步距角增量。转子的角位移正比于输入脉冲的数量,转子的角速度正比于输入脉冲的频率,转子的旋转方向取决于定子绕组的通电顺序。在使用过程中步进电机有一定的步距误差,但没有累计误差。若维持控制绕组的电流不变,则步进电机就可停在某一位置不动。其按力矩产生的原理可分为反应式步进电机和激磁式步进电机。按输出力矩大小可分为伺服式步进电机和功率式步进电机。
由于步进电机是属于感性器件,感抗与其输入频率是成正比。假设步进电机的转速增加,其感抗也会增大。该状态下流入电机线圈的电流就会减小,电机的输出扭力达不到要求输出,严重的情况下会造成电机失步或者电机只振动不转。这就要求其驱动电路能够提供稳定的输出电流,使步进电机具有稳定的转动。一般设计中步进电机驱动都用采用三极管或者是用ULN2803IC等来驱动,这些驱动在实验板或一些转速不高、带动负载小的应用场所使用比较合适,在实际工作设计中远远达不到所需要求。针对这些问题,各大公司陆续推出了专用的步进电机驱动芯片,简化其驱动设计。Allegro公司的SMA7029M多芯片模块就是一款性能使用简单控制优良的步进电机控制模块,该多芯片模块能为步进电机提供稳定的输出电流,使电机能够稳定的转动。
2 步进电机工作原理
通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
3 步进电机驱动设计
SMA7029M是专为高效率、高性能的两相单极步进电机设计的多芯片模块,它采用功率FET技术和单片逻辑控制电路对完成步进电机的运动控制。同一系列的还有SLA7024M和SLA7026M,三个芯片模块不同主要是在输出额定电流(1.5 A或3.0 A)和包装样式上。
3.1 SMA7029M结构及驱动设计
SMA7029M内部主要包含电流峰值检测部分,PWM关闭时间控制部分,电机逻辑控制部分,输出电流及回流电流控制部分,如图1所示。其工作过程主要是通过电流采样,通过峰值检测电路得到当前最大电流,根据其结果控制PWM工作时间,最终达到控制整个芯片组输出电流的目的。

图1也给出基于SMA7029M芯片组电机驱动设计的外围电路,主要包含参考电压取样电路,OC门反向器输入电路,电流取样以及输出变压器耦合电路。通过设置电路中的R3=47 kΩ,C1=470 pF,可以得到脉宽约等于12μs。
3. 2 逻辑控制关系
SMA7029M可以通过外部逻辑控制实现电机状态的改变,表1给出了详细的控制方式及输出结果。

其中tda和tdb扎连接外部OC门反相器的逻辑控制信号,连接关系见图1所示。从表l中可以看出,不同控制关系下输出的不同状态转移,A和B两个通道可以独立控制,例如在状态0及状态2下A,B通道分别独立工作,而在状态1下二者可以同时工作。
3.3 工作模式选择
通过改变图1中外部元器件取值来设置PWM电流启动点。Vb是供电电压,典型取值为5 V;R1,R2为分压电阻,为所需参考电压提供合适的输入;Rs是电流取样电阻。其中参考电压Vref输入最大不能超过2 V,相应地选择合适的电阻。在正常PWM模式(满电流工作)下,Iout需要设置到电机工作所需的满电流,它由式(1)决定:

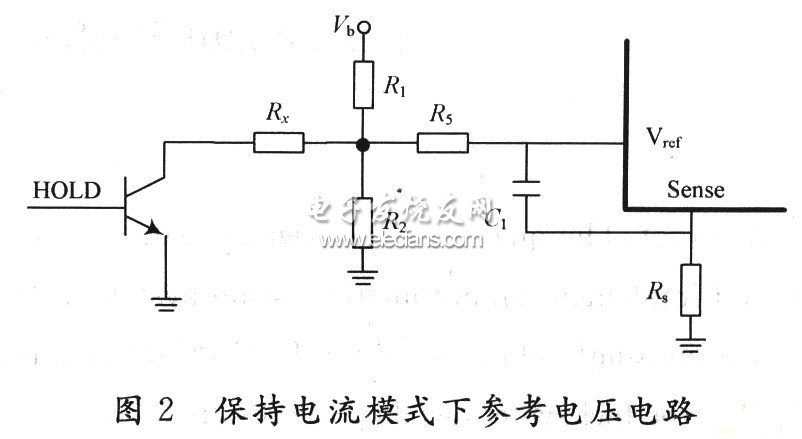
为了使输出电流可调,可以将图1中的固定电阻Rz改用可调电位器。在保持电流模式下,图2增加电路可以减小步进电机的电压。
其中外部三极管可以改变分压比,使参考电压Vref发生变化,从而减小输出电流。此时的Ihold由电阻R1,R2,Rx,Rs以及电压Vb共同决定:

4 结 语
步进电机驱动作为现代机电一体化产品中的关键部件之一,在当今社会中发挥的作用越来越重要,从数控机床、包装机械到电脑的外围装置、机器人系统、仪表仪器等各种信息工业产品中,都离不开步进电机,进而也对其驱动电路设计提出了进一步的要求。通过在包装机控制系统中的实际使用,进一步证明了该步进电机驱动器工作可靠,效率高,矩频特性好,可以广泛应用于小型机电一体化设备中。
-
步进电机驱动电路图大全(六款二相步进电机/三相反应式/LT2221驱动电路)2018-05-23 60410
-
SPI-7210M应用电路及步进电机驱动原理2008-08-29 618
-
步进电机驱动电路2009-02-09 1960
-
基于SMA7029M多芯片模块的步进电机驱动设计2009-12-22 1155
-
LB1836M构成的步进电机驱动电路2011-12-19 10498
-
stm32 驱动步进电机2016-03-14 1071
-
步进电机及其驱动原理2016-11-18 1034
-
步进电机的原理与驱动综述2021-08-12 1331
-
步进电机驱动相关的知识2022-10-19 2192
-
步进电机的驱动方式与特征2023-02-24 1503
-
步进电机驱动教程_步进电机功率计算2023-03-08 4347
-
步进电机驱动详解2023-03-16 362
-
如何使用KD2204M/SMB2204M驱动器驱动步进电机?2023-09-19 932
-
arduino如何驱动步进电机2024-01-14 3733
-
步进电机驱动电路原理 步进电机驱动器可以通用吗2024-01-24 2610
全部0条评论

快来发表一下你的评论吧 !
