

直流电动机的工作原理简述 直流电机工作原理图 直流电机有几种类型
工业控制
描述
电机: 俗称“马达”,依据电磁感应定律实现电能转换或传递的一种电磁装置。包括:电动机和发电机。
电动机在电路中是用字母M表示,它的主要作用是产生驱动转矩;作为用电器或各种机械的动力源,发电机在电路中用字母G表示,它的主要作用是利用机械能转化为电能。
电机实际使用过程,要加光耦隔离,要不很容易带回电磁干扰影响单片机。
Chapter 01
电动机简介
THEORY
导体受力的方向用左手定则确定。这一对电磁力形成了作用于电枢一个力矩,这个力矩在旋转电机里称为电磁转矩,转矩的方向是逆时针方向,企图使电枢逆时针方向转动。如果此电磁转矩能够克服电枢上的阻转矩(例如由摩擦引起的阻转矩以及其它负载转矩),电枢就能按逆时针方向旋转起来。
STRUCTURE
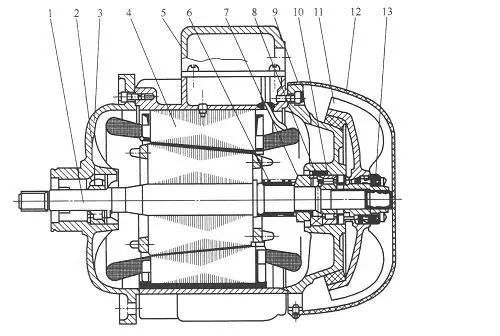
1—转子 2、10—轴承 3—前端盖
4—定子 5—接线盒 6—压簧
7—支承套 8—止推轴承 9—后端盖
**11—制动轮 12—风罩 13—锁紧螺母 **
CLASSIFICATION
按工作电源种类划分:
直流电机和交流电机。
按结构和工作原理可划分:
直流电动机、异步电动机、同步电动机。
直流电动机按结构及工作原理可划分:
无刷直流电动机和有刷直流电动机。
(有刷寿命短,容易烧碳刷,基本使用频率过高就不能选他,他有个好处就是便宜,使用频率高一两年就会出现很多损坏)
按用途可划分:
驱动用电动机和控制用电动机。
控制用电动机又划分:
步进电动机和伺服电动机等。
按运转速度可划分:
高速电动机、低速电动机、恒速电动机、调速电动机。低速电动机又分为齿轮减速电动机、电磁减速电动机、力矩电动机和爪极同步电动机等。
按起动与运行方式可划分:
电容起动式单相异步电动机、电容运转式单相异步电动机、电容起动运转式单相异步电动机和分相式单相异步电动机。
Chapter 02
常见的电机
直流发电机的工作原理就是把电枢线圈中感应的交变电动势,靠换向器配合电刷的换向作用,使之从电刷端引出时变为直流电动势的原理。
直流电动机具有调速性能好、起动容易、能够载重起动等优点,所以直流电动机的应用仍然很广泛,尤其在可控硅直流电源出现以后。
1
有刷直流电机
Brushed DC
直流有刷电机(Brushed DC,简称BDC),由于其结构简单,操控方便,成本低廉,具有良好的偏动和调速性能等优势,被广泛应用于各种动力器件中,小到玩具,按钮调节式汽车座椅,大到印刷机械等生产机械中都能看到它的身影。
直流电源的电能通过电刷和换向器进入电枢绕组,产生电枢电流,电枢电流产生的磁场与主磁场相互作用产生电磁转矩,使电机旋转带动负载。
优点: 价格低、控制方便
缺点: 由于电刷和换向器的存在,有刷电机的结构复杂,可靠性差,故障多,维护工作量大,寿命短,换向火花易产生电磁干扰。
2
步进电机
Stepping Motor
步进电机就是一种将电脉冲转化为角位移的执行机构;更通俗一点讲:当步进驱动器接收到个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。我们可以通过控制脉冲的个数来控制电机的角位移量,从而达到精确定位的目的;同时还可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。选型要注意步距角、扭矩力、多少相电机
优点: 控制简单,低速扭矩大,成本低;
缺点: 步进电机存在空载启动频率,所以步进电机可以低速正常运转,但若高于一定速度时就无法启动,并伴有尖锐的啸叫声;同时,步进电机是开环控制,控制精度和速度都没有伺服电机那么高。
3
伺服电机
Servo Motor
伺服电机广泛应用于各种控制系统中,能将输入的电压信号(或者脉冲数)转换为电机轴上的机械输出量,拖动被控制元件,从而达到控制目的。伺服电机系统见下图。一般地,要求转矩能通过控制器输出的电流进行控制;电机的反应要快、体积要小、控制功率要小。伺服电机主要应用在各种运动控制系统中,尤其是随动系统。
伺服电机有直流和交流之分,最早的伺服电机是一般的直流有刷电机,在控制精度不高的情况下,才采用一般的直流电机做伺服电机。当前随着永磁同步电机技术的飞速发展,绝大部分的伺服电机是指交流永磁同步伺服电机或者直流无刷电机。
优点: 可使控制速度,位置精度非常准确,效率高,寿命长。
缺点: 控制复杂,价格昂贵,需要专业人士才能控制。
4
无刷直流电机
Brushless DC
无刷直流电机【BLDCM】是在有刷直流电机的基础上发展来的,但它的驱动电流是不折不扣的交流。一般地,无刷电机的驱动电流有两种,一种是梯形波(方波),另一种是正弦一般的, 把方波驱动的叫做直流无刷电机(BLDC);把正弦波驱动的叫做永磁同步电机(PMSM), 这个实际上就是伺服电机。
直流无刷电机与伺服电机有类似的优缺点。BLDC电机比PMSM电机造价便宜一些,驱动控制方法简单一些。
5
直流减速电机
DC Reduction
直流电机旋转:给电机两根线供电电机就可以旋转,给正电压电机正转,给相反电压电机反转;电压越大,电机转得越快,电压越小,转速也变小。
电机一般还有一个 最小启动电压 ,就是可以使得电机(无负载)、开始旋转的电压值。为保证电机正常工作,一般需要接到电机两端的电压值范围为:最小启动电压至额定电压。并且在这个电压值范围内才认为转速与电压成正比。
电机线圈是有铜导线绕线而成的,所以其电机电枢绕组电阻一般都是非常小这样回路中电流一般都是比较大的。这对我们电机驱动设计有很大的影响。
另外,电机还有一个比较重要的参数:扭矩。简化理解 扭矩就是电机可以带动外部部件旋转的力量 ,在物理上用转矩来描述,单位为:N.m(常用单位有:Kg.cm)。大扭矩可以带动比较重的东西。一般认为:直流电机的扭矩和电流成正比。
6
力矩电动机
Torque Motor
力矩电动机具有低转速和大力矩的特点。一般在纺织工业中经常使用交流力矩电动机,其工作原理和结构和单相异步电动机的相同。
7
开关磁阻电动机
Switched Reluctance
开关磁阻电动机是一种新型调速电动机,结构极其简单且坚固,成本低,调速性能优异,是传统控制电动机强有力竞争者,具有强大的市场潜力。
8
异步电动机
Asynchronous Motor
异步电动机具有结构简单,制造、使用和维护方便,运行可靠以及质量较小,成本较低等优点。异步电动机主要广泛应用于驱动机床、水泵、鼓风机、压缩机、起重卷扬设备、矿山机械、轻工机械、农副产品加工机械等大多数工农生产机械以及家用电器和医疗器械等。
在家用电器中应用比较多,例如电扇、电冰箱、空调、吸尘器等。
9
同步电动机
Synchronous Motor
同步电动机主要用于大型机械,如鼓风机、水泵、球磨机、压缩机、轧钢机以及小型、微型仪器设备或者充当控制元件。其中三相同步电动机是其主体。此外,还可以当调相机使用,向电网输送电感性或者电容性无功功率。
Chapter 03
H桥电路分析
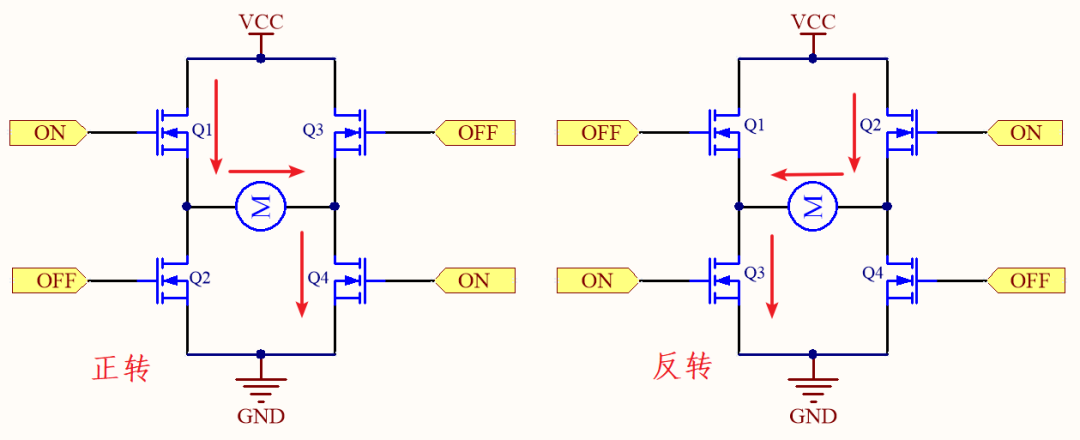
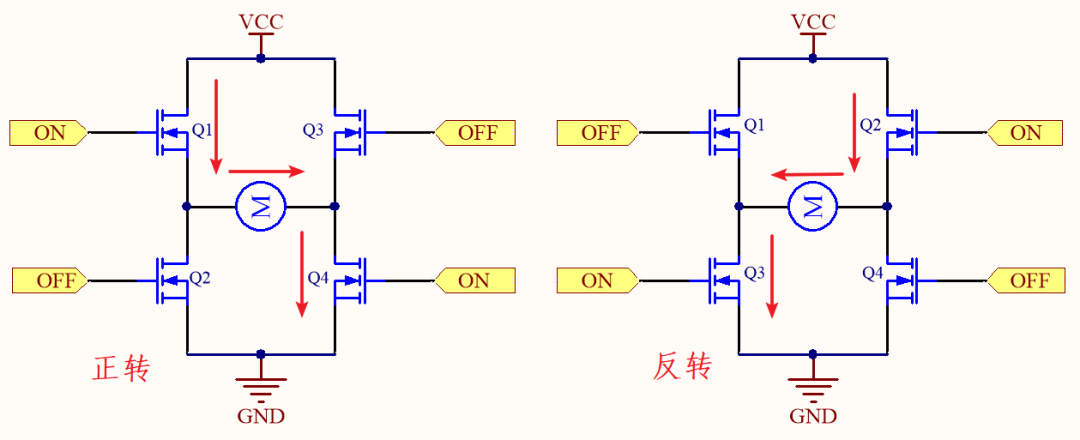
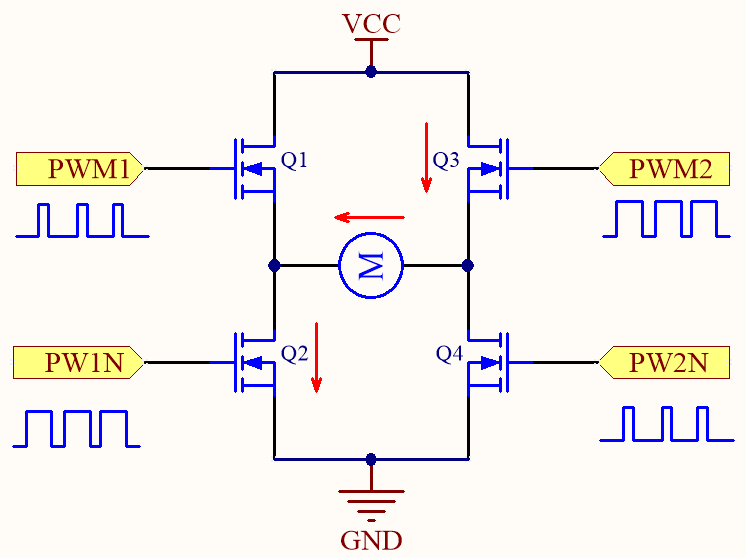
以MOS管搭建的H桥电路解释电机正反转控制。要使电机运转,必须使对角线上的一对MOS管导通。如下图,当Q1管和Q4管导通时(此时必须保Q2和Q3关断),电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
另一对MOS管2相Q3导通的时候(此时必须保证Q1和Q4关断),电流从右至左流过电机,从而驱动电机沿逆时针方向转动。驱动电机时,保证H桥两个同侧的MOS管不会同时导通非常重要,如果MOS管Q1和Q2同时导通,那么电流就会从电源正极穿过两个MOS管直接回到负极,此时电路中除了MOS管外没有其它任何负载,因此电路上的电流就达到最大值,烧坏MOS管和电源。Q3和Q4同时导通是同样的道理。
驱动电机时,保证H桥两个同侧的MOS管不会同时导通非常重要,如果MOS管Q1和Q2同时导通,那么电流就会从电源正极穿过两个MOS管直接回到负极,此时电路中除了MOS管外没有其它任何负载,因此电路上的电流就达到最大值,烧坏MS管和电源。Q3和Q4同时导通是同样的道理。
简单的开关只能控制电机正反转,引入PWM控制可以实现方向和速度调节。调节占空比实现控速,占空比越大平均电压(电流)越大,速度越快PWM频率一般在10KHz~20KHz之间。频率太低会导致电机转速过低,噪声较大。频率太高,会因为MOS管的开关损耗而降低系统的效率。
根据不同桥臂的PWM控制方式不同,大致上可以分为三种控制模式:
受限单极模式、单极模式、双极模式。
01
受限单极模式
受限单极模式:电机电枢驱动电压极性是单一的
优点: 控制电路简单。
缺点: 不能刹车,不能能耗制动,在负载超过设定速度时不能提供向力矩。调速静差大,调速性能很差,稳定性也不好。
02
单极模式
单极模式:电机电枢驱动电压极性是单一的。
优点: 启动快,能加速,刹车,能耗制动,能量反馈,调速性能不如双极模式好,但是相差不多,电机特性也比较好。在负载超速时也能提供反向力矩。
缺点: 刹车时,不能减速到0,速度接近0速度时没有制动力。不能突然倒转。动态性能不好,调速静差稍大。
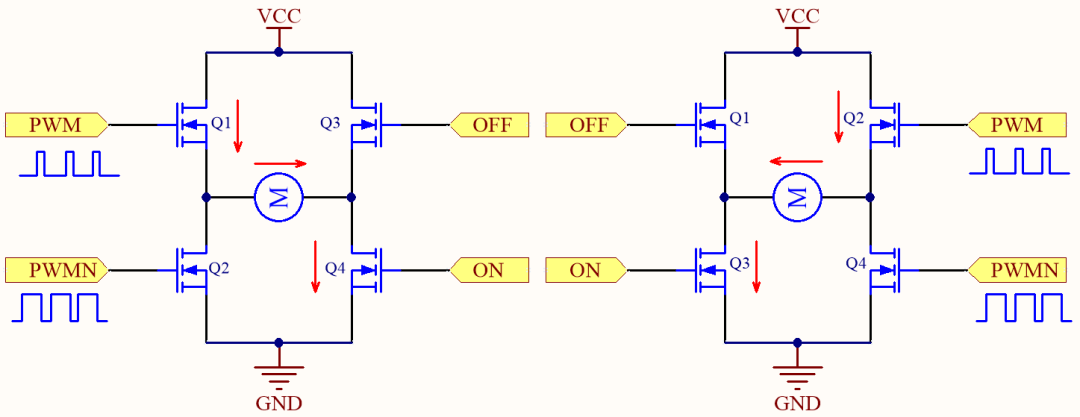
PWM和PWMN是互补的PWM信号,一般用高级控制定时器的通道和互补通道控制。在PWM为高电平时:MOS管1和4都导通,MOS管2和3都截止,电流从电源正极,经过MOS管1,从左到右流过电机、然后经过MOS管4流入电源负极。在PWM为低电平时:MOS管2和4都导通,MOS管1和3都截止,根据楞次定律,存在自感电动势,电流还是从左到右流过电机,经过MOS管4和MOS管2形成电流回路。
03
双极模式
双极模式:电枢电压极性是正负交替的。
优点: 能正反转运行,启动快,调速精度高,动态性能好,调速静差小,调速范围大,能加速,减速,刹车,倒转,能在负载超过设定速度时,提供反向力矩,能克服电机轴承的静态摩擦力,产生非常低的转速。
缺点: 控制电路复杂。在工作期间,4个MOS管都处于工作状态,功率损耗大,电机容易发烫。
PWM1和PWM1N、PWM2和PWM2N是PWM互补通道。使用高级控制定时器通道和互补通道控制双极模式中,PWM1和PWM2周期相同,占空比相同,极性相反,使得对角线上的两个MOS管同时导通,同时关断。
-
直流电机的基本工作原理与结构2025-02-27 933
-
直流电机调速器的工作原理和结构2024-08-26 7154
-
无刷直流电机的结构及工作原理2023-03-08 1607
-
直流电机的工作原理及结构2023-03-07 8251
-
直流电动机工作原理2021-09-15 1598
-
有关无刷直流电动机的基本知识汇总2021-08-11 3203
-
直流电机调速器的工作原理2021-07-19 17638
-
直流电机的工作原理是什么?2021-07-07 1385
-
直流电机的基本模型及工作原理2021-07-06 2472
-
请问有直流电动机工作原理图吗?2019-09-30 3420
-
请问直流电动机和发电机的工作原理是什么?2019-09-12 2924
-
直流电动机2008-12-04 1587
-
直流电动机的分类2008-09-01 2192
-
直流电动机的工作原理/直流发电机的工作原理2008-07-18 19915
全部0条评论

快来发表一下你的评论吧 !
