

如何设计一个具有最低安全和性能要求的L3自动驾驶系统呢?
汽车电子
描述
在自动驾驶领域,提起L3,特别容易让人扼腕叹息。
2017年7月,奥迪开汽车行业之先河,推出了全球首个搭载L3自动驾驶系统的量产车型——奥迪A8,并计划于2017年底全球上市。
2020年4月,距离奥迪推出L3自动驾驶系统足足过了33个月,我们没有等来奥迪A8的“如来神掌”,却等来其管理层宣布放弃为新一代A8搭载L3自动驾驶系统的决定。也是在这个时间点,L3自动驾驶系统开始被唱衰,跳过L3研发L4自动驾驶系统成为当时的一股潮流。
2020年6月,距离奥迪放弃L3自动驾驶系统不到2个月,联合国欧洲经济委员会(United Nations Economic Commission for Europe,UNECE)通过并颁布了UNR157法令,这也是国际上第一个对L3自动驾驶系统具有约束力的法规。
2021年11月,奔驰L3自动驾驶系统DRIVE PILOT通过了德国联邦机动车运输管理局(Kraftfahrt-Bundesamt,KBA)严格的技术条例审批,也使其成为全球首个获得UNR157认证的汽车企业。
2022年5月,DRIVE PILOT先是在德国进行商用,2023年1月,又获批在美国内达华洲获批商用,近日又有媒体报道即将进入中国。
我不知道奥迪的管理层是怎么想的,但我知道奥迪的销售显然是词穷了。2023年3月份的一个周六,我闲着无聊,就溜达进了奥迪的4S店。和销售一番寒暄后,我故作纠结状问销售:之前也看了蔚来,现在不知道怎么选。销售略作迟疑之后,底气十足的说到:奥迪的核心技术还是三大件……。
说得都对,也很有道理,但总觉得这样的话术已经很难吸引到我这样一棵老韭菜,可能还是我太穷,无法静下心来欣赏看到奥迪发射的光芒。
闲话少叙、言归正传,本文通过浅浅的解读UNR157这份法规,来看一下如何设计一个具有最低安全和性能要求的L3自动驾驶系统。
01 基本介绍
UNR157法规的全称为《Proposal for a new UN Regulation on uniform provisions concerning the approval of vehicles with regards to Automated Lane Keeping System》,从其全称也可以看出来,定义的这个自动驾驶系统叫自动车道保持系统(Automated Lane Keeping Systems,ALKS),2021年1月1日已经生效,主要适用于高速公路低速或拥堵场景。
2022年6月,UNECE批准了该法规的修正案,修正案中将ALKS最大运行速度由60km/h增加到130km/h,并加入变道过程,这份法规的适用场景也由低速、拥堵场景拓展到高速公路点到点自动驾驶全场景。修正后的法规已于2023年1月在适用它的缔约方中生效,主要包括英国、日本、韩国、澳大利亚、美国等。
注:通过老版UNR157认证的奔驰DRIVE PILOT支持的最高车速就是60km/h,实现的就是行业内更常说的L3交通拥堵辅助(Traffic Jam Assistant,TJA)功能。 本文首先对最新修订的法规内容进行介绍。
ALKS的工作流程如图1所示,ALKS被激活后,将执行全部的动态驾驶任务,此过程无需驾驶员的进一步输入,但是在检测到系统故障、碰撞风险、超出ODD等非严重的ALKS故障或车辆故障,需要请求驾驶员接管,当驾驶员接管后且车辆具备继续人工驾驶的能力,则变成有人驾驶,如果长时间无人接管或驾驶员接管后但车辆不具备继续人工驾驶的能力,将执行最小风险策略,并最终使车辆达到最小风险状态。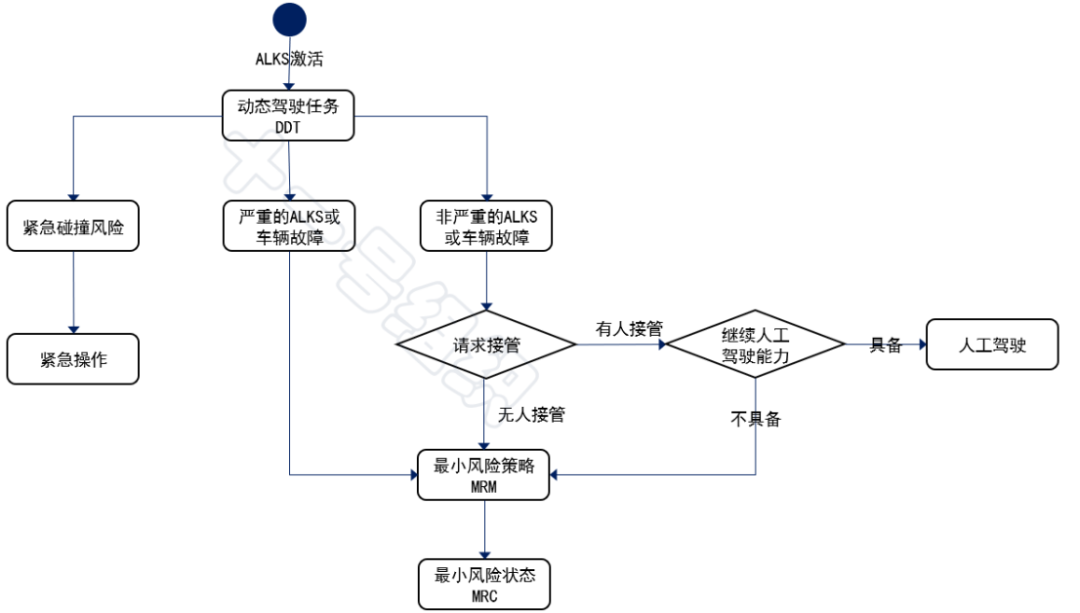
图1 ALKS工作流程
但在严重的ALKS故障或车辆故障发生时,已经来不及让驾驶员接管,直接执行最小风险策略从达到最小风险状态。 注:
【1】最小风险策略(Minimal Risk Maneuver,MRM):系统无法继续执行动态驾驶任务时,采取的使车辆达到最小风险状态的措施(本车道停车、靠边停车等)。
【2】最小风险状态(Minimal Risk Condition,MRC):系统执行最小风险策略或驾驶员接管后使车辆达到稳定的静止状态。
02 动态驾驶任务
先来回顾一下SAE J3016中关于动态驾驶任务(Dynamic Driving Task,DDT)的定义,主要包括如下五个子任务:
(1)车辆纵向运动控制; (2)车辆横向运动控制; (3)目标和事件的探测与响应; (4)驾驶决策; (5)车辆照明及信号装置控制。
UNR157在动态驾驶任务章节主要介绍了前两个部分,用单独一章节介绍第三部分,第四部分未有涉及,第五部分分散在各章节。
对前两个DDT子任务的整体要求可归纳为如下三个方面:
(1)保证车辆可以在车道内稳定行驶(包括纵向和横向),不应出现画龙、压线等不稳定行驶行为,以免对其他道路使用者产生干扰或危害,且系统被短暂干扰后具有恢复本车道稳定行驶的能力。
(2)在感知能力足够支持变道的的情况下,允许在变道场景满足的时候执行变道,变道场景包括:
(a)常规变道场景,包括正常行驶阶段变道(超车变道、入匝道变道、出匝道变道、道路变窄变道等)和执行最小风险策略阶段变道(靠边停车等);
(b)紧急变道场景,主要指紧急碰撞风险下的压线变道;
(c)为执行特殊任务(救援、执法等)的车辆让道场景。具体需要为何种车辆让道,一方面可以参考当地法律法规、另一方面可以基于道路常识判断。当执行特殊任务车辆通过后,ALKS需要控制车辆立即回到原来车道恢复车道保持行驶。
(d)为躲避前方障碍物而进行的避障变道场景。避障变道过程中为了保证安全,一方面需要与道路边界、其他车辆以及道路使用者保持安全的横向和纵向距离,另一方面除道路曲率产生的横向加速度外,ALKS产生的横向加速度需要控制在1m/s2以内。且在ALKS车辆左前轮越过车道线大于1m时,还需要对目标车道是否满足进行进行评估,详见下文。
(3)相邻车道上车辆有妨碍ALKS车辆行驶安全的行为时,比如是一辆大车或向ALKS车辆所在车道侧偏离,ALKS车辆可在本车道内适当调整自身速度或横向距离来保证行驶安全。
为实现上述要求,UNR157主要从纵向速度控制、横向变道过程对ALKS做了详细要求。
一、纵向速度控制
UNR157规定ALKS可运行的最高车速为130km/h,厂商需要基于自身传感器的前向探测能力来定义自己所设计系统最高可运行车速。但要注意的是,只有在最小风险策略中支持变道功能的ALKS,最高可运行车速才允许被设计为大于60km/h。
ALKS激活后,一方面需要基于道路、环境等状况实时调整车辆行驶速度,比如不同曲率半径弯道的行驶速度要求就不一样、恶劣天气和晴朗天气下的行驶速度要求也不同;另一方面需要通过实时调整车速来与前车保持安全的跟车距离,从而避免潜在的碰撞发生。
ALKS激活后,当车辆速度大于等于2km/h小于等于60km/h时,需要通过控制车速来保证与前车的距离不小于最小跟车距离dmin。最小跟车距离计算公式为dmin= VALKS*tfront,其中,VALKS为ALKS车辆当前行驶速度,tfront为最小跟车时距,值参见表1。未在表中列出的值,可以通过线性插值法确定。
表1 ALKS车辆(2km/h < VALKS < 60km/h)最小跟车距离要求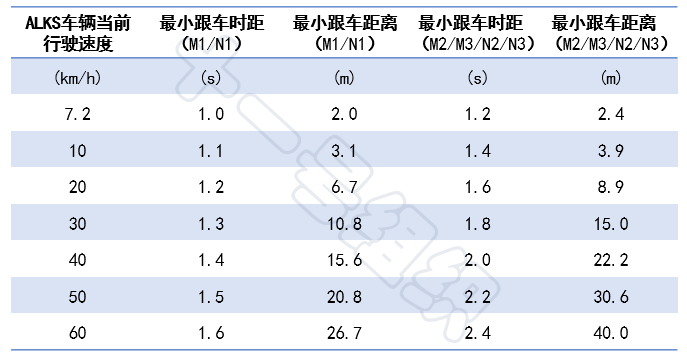
ALKS激活后,当车辆速度大于0小于2km/h时,对于M1/N1类型车辆,最小跟车距离不得小于2m,对于M2/M3/N2/N3类型车辆,最小跟车距离不得小于2.4m。
ALKS激活后,当车辆速度大于60km/h时,最小跟车距离需要基于当地法律法规确定。
ALKS激活后,对于行驶路线前方出现的静止车辆、静止道路使用者或道路封闭时,ALKS在厂商定义的激活车速范围内可使车辆停车从而避免碰撞发生。
对于行驶路线前方出现的急减速车辆、突然切入车辆、或者突然出现的障碍物,ALKS车辆应采取适当的操作来最小化对乘员或其他道路使用者带来的伤害。
(1)对于进行全力减速的前车,ALKS车辆应采取适当的操作来避免碰撞;
(2)对于突然切入车辆,当以下条件同时满足时,ALKS车辆应避免与其碰撞:
(a)切入车辆纵向速度小于ALKS车辆纵向速度;
(b)切入车辆前轮外缘越过车道线但与车道线外侧距离小于0.3m时,已经进行了至少0.72s的横向移动;
(c)ALKS车辆与切入车辆的预计碰撞时间大于Vrel/(2 x 6m/s2)+0.35s(其中,Vrel为相对速度,ALKS车辆速度大于切入车辆速度时,值为正)。
(3)对于没有遮挡的横穿行人,横穿速度不超过5km/h,预计碰撞点不超过车辆纵向中心平面0.2m,ALKS激活后,在不大于60km/h的运行速度内,应避免与行人碰撞。对于大于60km/h的运行速度,ALKS应尽量减少碰撞可能性的发生。
审核编辑:刘清
-
自动驾驶要不要跳过L3?华为和小鹏给出了相反的答案2026-04-20 5379
-
L3级自动驾驶在技术上有什么不一样的要求?2026-01-07 2857
-
康谋方案 | L2进阶L3,数据采集如何助力自动驾驶2024-01-25 1462
-
LabVIEW开发自动驾驶的双目测距系统2023-12-19 4488
-
实现L3级自动驾驶——自动驾驶产业转折点2023-06-06 1056
-
本田的L3自动驾驶将在日本上路2020-11-18 3129
-
自动驾驶l3和l4的区别_自动驾驶需求分析2020-08-27 11399
-
关于L3级自动驾驶截然相反的两个观点2020-04-16 4965
-
奥迪取消了投入超10亿欧元的L3级自动驾驶研发2020-03-18 3560
-
如何让自动驾驶更加安全?2019-05-13 3728
-
自动驾驶量产元年将至 L3自动驾驶步入冲刺阶段2019-02-27 2187
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3282
-
硅谷组建团队、L3产品落地,想法多多的腾讯自动驾驶2018-11-13 3365
-
L3级别自动驾驶车型量产,L4还有多远呢?2018-10-09 18794
全部0条评论

快来发表一下你的评论吧 !
