

西门子1200PLC之间的ModbusTCP通讯如何实现?
工业控制
描述
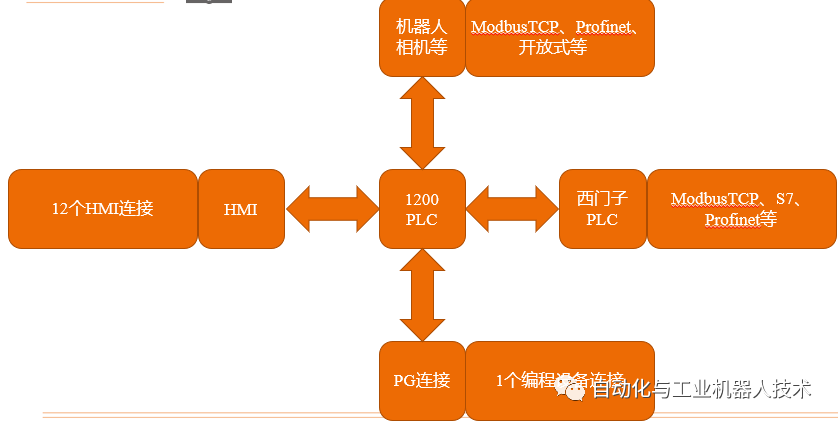
西门子1200PLC通过以太网通讯与其它设备进行数据交互,西门子1200PLC可以和西门子系列plc进行通讯,例如S7-300/S7-1200/S7-1500等,使用ModbusTCP、s7、Profinet等通讯协议
西门子1200PLC支持1个编程设备(PG)的连接,
西门子1200PLC支持12个HMI设备的连接
西门子1200PLC可以和机器人、相机等第三方设备进行通讯,使用ModbusTCP、Profinet等通讯协议
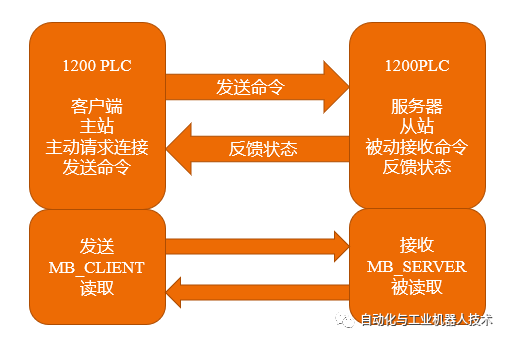
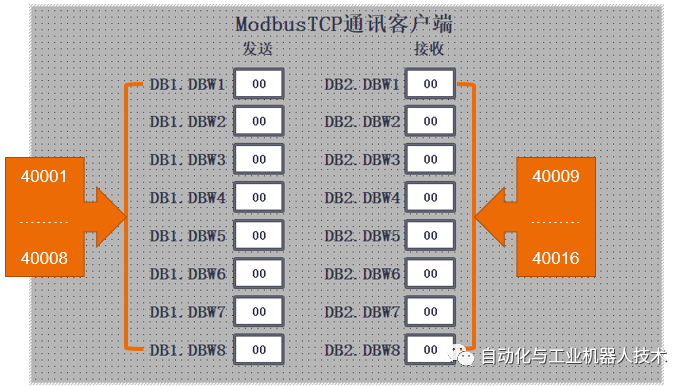
西门子1200PLC使用ModbusTCP通讯时,1200PLC可以做客户端主站,也可以做服务器从站,做客户端时主动请求连接并发送命令,做服务器时被动等待连接并反馈状态
客户端使用MB_CLIENT指令,服务器使用MB_SERVER指令。
1200PLC ModbusTCP通讯编程:
1、打开博途软件,创建新项目,添加两个1200PLC,一个做客户端一个做服务器,添加两个触摸屏
2、在客户端PLC中,创建一个函数块并命名,再创建两个数据块并命令,数据块属性中勾掉“优化的块访问”选项,在数据块中分别定义8个整型数据类型的变量。
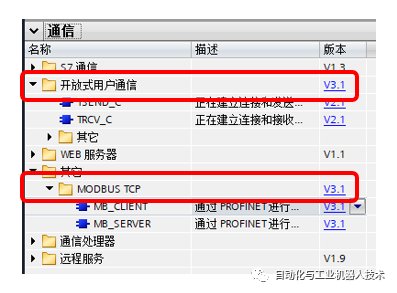
3、指令中找到ModbusTCP客户端通讯指令MB_CLENT,这里要注意通讯指令的版本,V4.0以上版本的指令使用方法与V3.1版本是不同的,具体使用方法请参考相关的帮助文件。
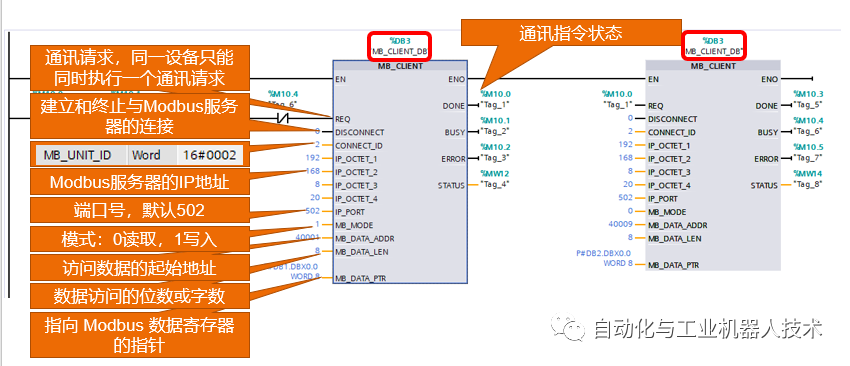
4、创建两个相同背景数据块的MB_CLIENT指令,输入个引脚关联的变量。
MB_CLIENT指令每个引脚的功能说明:
4、触摸屏上组态8个数值输入框,关联PLC中“发送”数据中的变量,用于输入要发送到服务器的数据,组态8个数值显示框,关联PLC“接收”数据块中的变量,用于显示从服务器读取到的数据
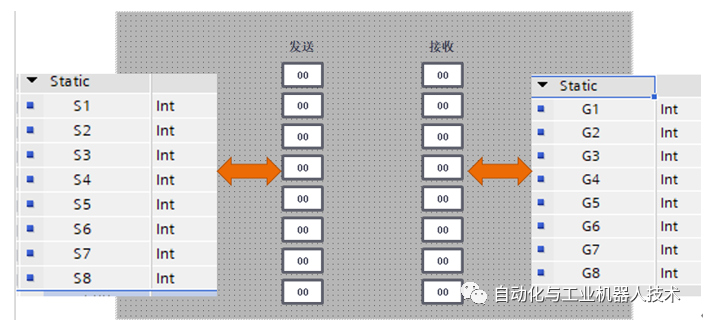
在服务器PLC中,创建一个函数块并命名,再创建一个数据块并命令,数据块属性中勾掉“优化的块访问”选项,在数据块中定义16个整型数据类型的变量。
创建ModbusTCP服务器通讯指令MB_SERVER,输入个引脚关联的变量
MB_SERVER指令每个引脚的功能说明:
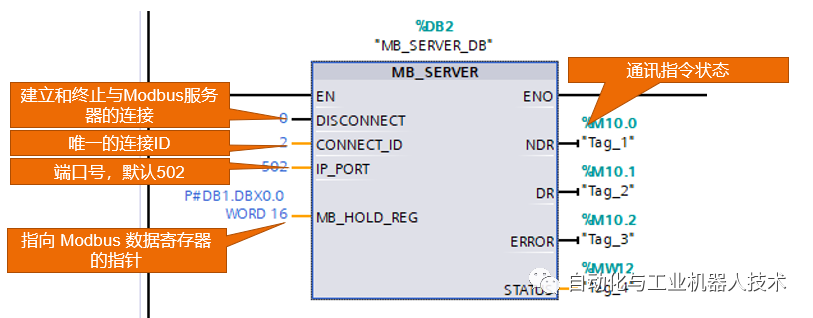
服务器Modbus数据寄存器的长度要大于等于客户端收发数据的总长度。
触摸屏上组态8个数值输入框,关联PLC中“通讯”数据中的S1-S8变量,用于输入要发送到客户端的数据,组态8个数值显示框,关联PLC“通讯”数据块中的G1-G8变量,用于显示接收到客户端的数据,
下载PLC程序和触摸屏程序
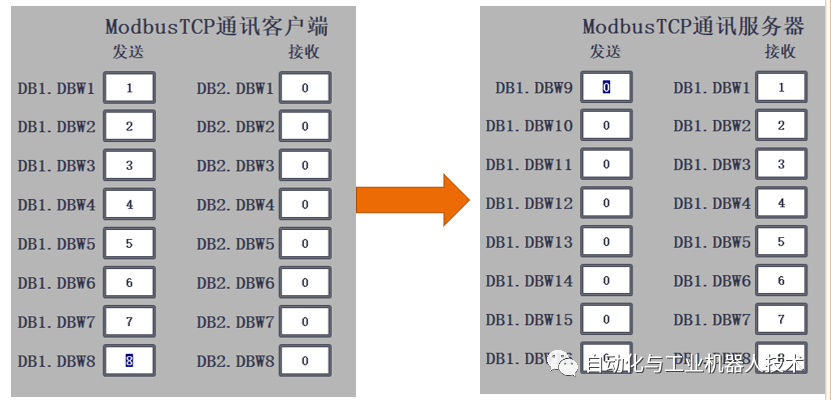
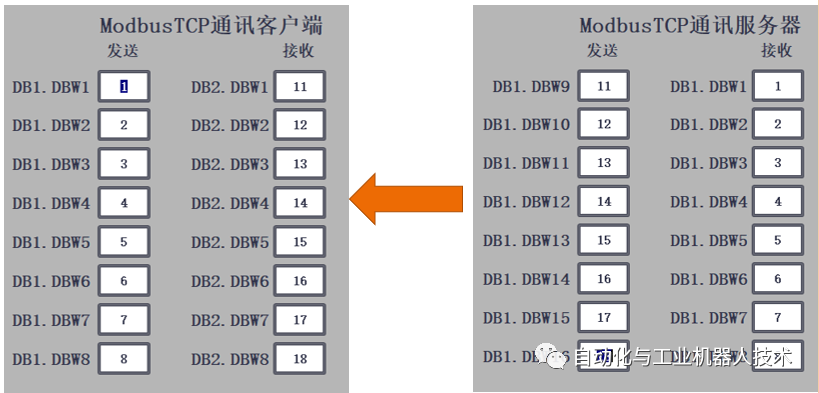
PLC编程完成后,进行通讯测试,
客户端触摸屏上输入发送的数据,查看服务器触摸屏上接收到的数据
服务器触摸屏上输入发送的数据,查看客户端触摸屏上接收到的数据,数据正确说明两个1200PLC之间使用ModbusTCP通讯正常。
审核编辑:刘清
-
EtherCAT转ProfiNet西门子1200PLC与伺服电机通讯案例全解2025-03-21 2433
-
如何实现安川MP3300运动控制器与西门子1200系列PLC进行ModbusTCP通讯2024-10-16 2592
-
西门子1200PLC与台达VFD变频器的Modbus通讯2023-11-09 2095
-
西门子1200PLC与海康机器人SC2000系列视觉传感器顺畅连接2023-11-07 5954
-
西门子1200PLC和西门子1500PLC的ModbusRTU通讯2023-08-23 9148
-
昆仑通泰触摸屏和西门子1200PLC的通讯设置2023-08-21 16828
-
EtherCAT转profinet网关连接kollmorgen驱动器将其接入西门子1200PLC2023-08-10 666
-
西门子1200PLC连接科尔摩根伺服驱动器通讯案例2023-05-23 1504
-
西门子SMART200 PLC和西门子1200 PLC的Modbus TCP通讯实例2023-04-25 20301
-
西门子1200PLC入门2023-04-18 983
-
西门子1200PLC工程创建及程序下载读取2023-02-09 21472
-
Modbus转Profinet网关将丹佛斯变频器接入西门子1200PLC配置2022-08-17 1359
-
西门子1200PLC与库卡通讯软件设置步骤2022-03-17 1642
-
基于Modbus/TCP的西门子1200PLC和STM32通信2021-11-23 2312
全部0条评论

快来发表一下你的评论吧 !
