

什么是AMR磁阻传感器?AMR磁阻传感器如何“施展拳脚”?
MEMS/传感技术
描述
磁传感器是什么?
看上去神秘的“磁”,其实离我们并不遥远,时刻环绕着我们。因为,地球本身就可以看成一个天然的巨大磁体,叫做地磁场。如果把地磁场简化为一个条形磁铁的话,那么地磁南极实际是在地理北极附近,而地磁北极实际是在地理南极附近。这两个磁极的假设磁轴并不是和地球的自转轴是重合的,而是有大约成11.5度的倾斜角度。地磁场数值从0.4高斯到0.6高斯,其强度与方向也随地点而变化。
所谓磁传感器,就是把磁场、放射线、压力、温度、光等因素作用下引起敏感元件磁性能的变化转换成电信号。现代工业和电子产品中应用中,磁传感器最广泛的是以感应磁场强度来测量电流、位置、方向等物理参数。在现有技术中,有许多不同类型的磁传感器,最常见的是采用霍尔(Hall)元件、各向异性磁电阻(Anisotropic Magnetoresistance, AMR)、巨磁电阻(Giant Magnetoresistance, GMR)、隧道磁阻传感器(Tunnel Magnetoresistance, TMR)为核心的传感器。
什么是AMR磁阻传感器?
某些金属或半导体在遇到外加磁场时,其电阻值会随着外加磁场的大小发生变化,这种现象叫做磁阻效应,电阻的变化量叫做磁阻。
1857年,Thomson发现坡莫合金的的各向异性磁阻效应。对于有各向异性特性的强磁性金属, 磁阻的变化是与磁场和电流间夹角有关的。我们常见的这类金属有铁、钴、镍及其合金等。当外部磁场与磁体内建磁场方向成零度角时, 电阻是不会随着外加磁场变化而发生改变的;但当外部磁场与磁体的内建磁场有一定角度的时候, 磁体内部磁化矢量会偏移,薄膜电阻降低, 我们这种特性称为各向异性磁电阻效应(Anisotropic Magnetoresistive Sensor,简称AMR)。磁场作用效果下图。
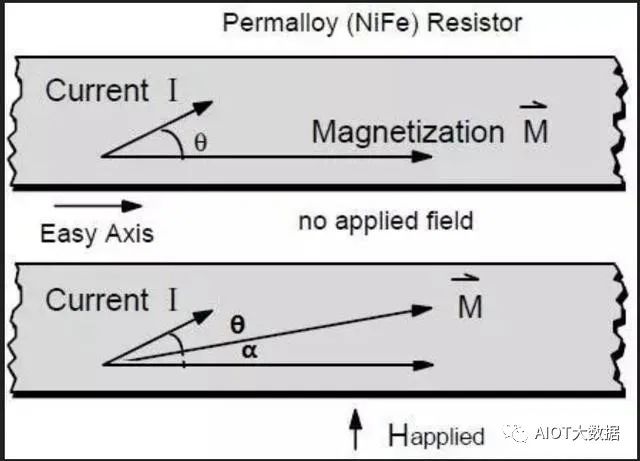
坡莫合金的AMR效应
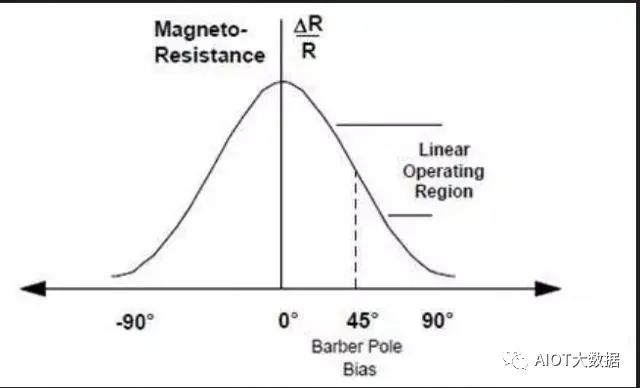
磁阻变化值与角度变化的关系
薄膜合金的电阻R就会因角度变化而变化,电阻与磁场特性是非线性的,且每一个电阻并不与唯一的外加磁场值成对应关系。从上图中,我们可以看到,当电流方向与磁化方向平行时,传感器最敏感,在电流方向和磁化方向成45度角度时,一般磁阻工作于图中线性区附近,这样可以实现输出的线性特性。
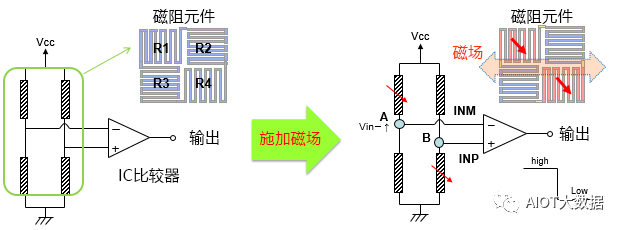
AMR磁传感器的基本结构由四个磁阻组成了惠斯通电桥。其中供电电源为Vb,电流流经电阻。当施加一个偏置磁场H在电桥上时,两个相对放置的电阻的磁化方向就会朝着电流方向转动,这两个电阻的阻值会增加;而另外两个相对放置的电阻的磁化方向会朝与电流相反的方向转动,该两个电阻的阻值则减少。通过测试电桥的两输出端输出差电压信号,可以得到外界磁场值。
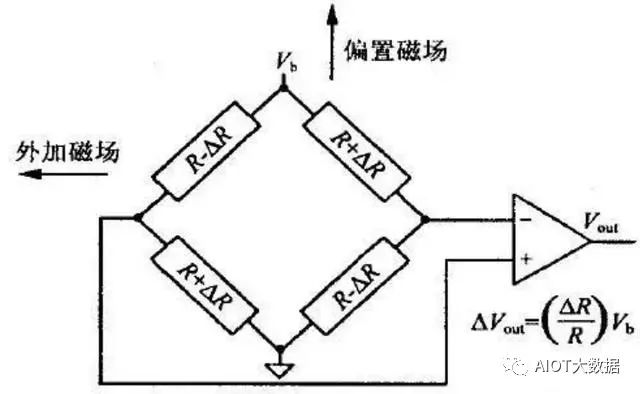
AMR磁阻传感器等效电路
AMR磁阻传感器如何“施展拳脚”?
各向异性磁阻传感器的测量范围正好是以地球磁场分布范围为中心,最适合工作在地球磁场环境下的磁传感器。其采用常见的坡莫合金,具有精度高,体积小,稳定性好等优点,且工艺上只需一层磁性薄膜,工艺简单,成本低,不需要昂贵的制造设备,适合批量生产和更迎合消费类电子市场的需求。
AMR磁阻传感器可以很好地感测地磁场范围内的磁场低于1高斯。传感器可用来检测一些铁磁性物体如飞机、火车、汽车。其它应用包括磁罗盘、旋转位置传感、电流传感、钻井定向、线位置测量、偏航速率传感器和虚拟实景中的头部轨迹跟踪。
导航功能
磁传感器最初是利用其磁性来作为航海指南针。磁传感器和加速度计可以组成电子罗盘,是测量方位角比较经济的一种电子仪器。如今电子罗盘广泛应用于汽车和手持电子罗盘,手表,手机,对讲机,雷达探测器,望远镜,探星仪,穆斯林麦加探测器(穆斯林钟),手持 GPS 系统,寻路器,武器/导弹导航(航位推测),位置/方位系统,安全/定位设备,汽车、航海和航空的高性能导航设备,电子游戏机设备等需要方向或姿态显示的设备。
- 车辆管制功能
由于地球是个巨大的磁场,当车辆这类大磁体通过时,会引起地磁场局部的扰动。磁传感器可以探测到车辆的存在,行驶方向,行驶速度,车辆大小等。因此,地下车库可以计算剩余车位数量,可以监测道路车流量情况,为人们的出行提供道路和停车信息。在当前大力发展的“智慧城市”中,将会有很重要的作用!
地磁探测
各向异性磁阻传感器可以用来辨别埋藏物质的。磁阻传感器是利用薄膜合金遇到磁场会产生磁阻值变化的性质,当电桥遇到不同强度的磁场时会产生不同的电压输出,将磁性信号转变为电信号。面对密布于城市各个角落的地下管线错综复杂,在施工过程中经常出现打漏管线情况,进而造成漏水、漏气、停电等事故,该应用有现实意义。
ARM在机器人领域的应用
协作机器人是指在共享空间中与人类互动或近距离地与人一起安全工作以生产东西的机器人。1978年,日本广岛一家工厂的切割机器人在切钢板时将一名值班工人当作钢板操作,导致了悲剧的发生,自那时起工业机器人的安全性就成为了所有机器人研发人员一直在努力解决的问题。而从1996年世界上第一台商业化人机协作机器人WAM机械臂于美国诞生以来,又一个核心问题始终困扰着研发者——如何在实现安全化的同时,提升生产效率并降低成本。
作为机电系统的一种外在表现形式,工业协作机器人的机械臂通常通过变速箱连接到电机,而要实现电机的精确控制和高效换向,高分辨率电流和旋转位置信息至关重要。一般而言,在基于旋变器的系统中,分辨率和精度可能非常高,但终端解决方案可能价格昂贵且体积较大;无传感器方案也可用于检测反电动势电流,而且还能降低传感器重量和成本,但是电机启动性能可能是个问题;利用三个霍尔效应传感器检测电机磁体的位置则通常用于对成本敏感的应用中,由于需要监控三个信号,往往会产生空间和安装难题。作为工业自动化领域半导体方案的专业厂商,ADI公司提供基于异性磁阻(AMR)技术的角度传感器,借助ARM传感器,不仅可实现高角度精度,而且可获得非常小的传感器子系统,并且能够在电机总成内定位传感器。
什么是AMR技术?
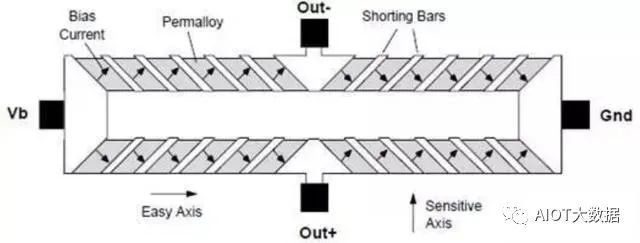
基于AMR理念的传感器的材料电阻率取决于相对于电流方向的磁化方向。该传感器通常沉积为薄膜透磁合金(磁性铁镍合金)。AMR传感器在饱和状态下工作,因此外部磁场对电阻变化起决定作用。外部磁场和电流方向平行时电阻最大,施加磁场与载流透磁合金的平面垂直时电阻最小。两个独立的惠斯登电桥配置以彼此呈45°的方式排列时,可实现角度传感器,其正弦和余弦输出取决于外部磁场方向。此配置可提供具有180°绝对测量范围的传感器。
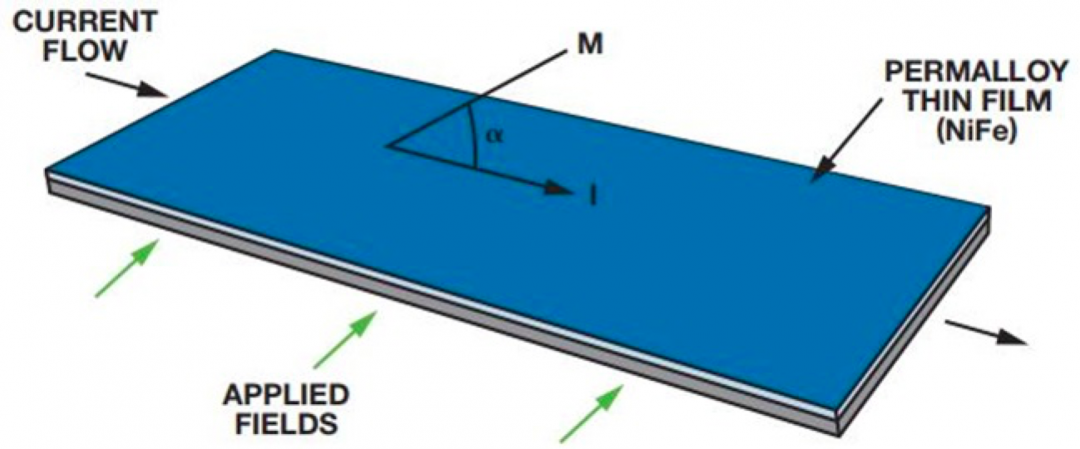
AMR工作原理
在当今的位置检测技术中,各向异性磁阻(AMR)薄膜材料变得日益重要。相比传统技术,磁阻(MR)位置测量具有多种优势。可靠性、精度和整体鲁棒性是推动磁阻检测技术快速发展的主要因素。低成本、相对较小的尺寸、非接触式操作、宽温度范围、对灰尘和光的不敏感性、宽磁场范围,这些特性共同造就出一种鲁棒的传感器设计。
决定机器人精度和可重复性规格的因素
当机器人处于工作状态时,电机旋转速度往往非常快,相比之下,机械臂的运动速度要慢得多。位置传感器通常安装在电机本身上,送回机器人控制器的关节角度解读结果会显示关节的位置,然后从电机角度传感器直接解释,或在机械臂一侧进行解释。在机械臂一侧的情况下,电机角度传感器将被用来控制电机速度。还有一个安全制动器,当断电时它会将机械臂固定在适当的位置,以免整个机械臂倒塌。
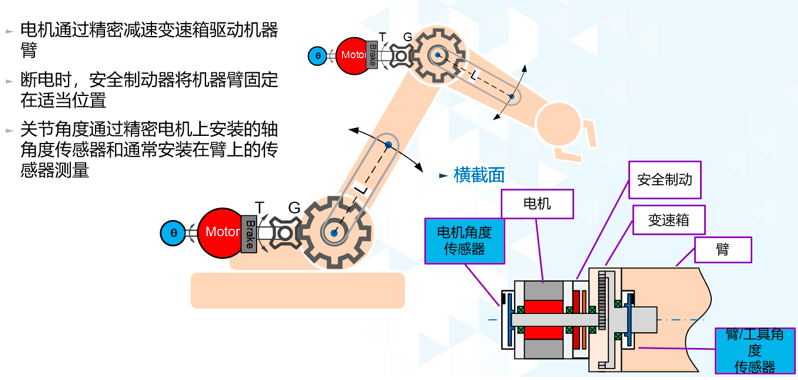
工业机器人架构
可重复性是机器人设计中最常使用的术语之一,一旦机械臂始终回到同一位置,用户就可以在任务开始时对其进行校准,然后便知道它会保持一致。人们经常使用精度一词代替可重复性,它是重复性任务(例如机器人技术)中最重要的规格和关键参数之一。具有高重复性的系统经校准后可实现很高的绝对精度。
了解可重复性规格和机器人的作用范围之后,我们就可以推断旋转编码器的规格。伺服电机上和机器人关节上一般都有编码器,变速箱通过提高扭矩,将电机的高速转动转换成受控的低惯性臂运动。由于机器人中有多个关节,而且要考虑机械公差,因此组合多个关节以实现机器人在传感器下的总体作用范围时,关节的性能应比目标角度重复性规格更高。
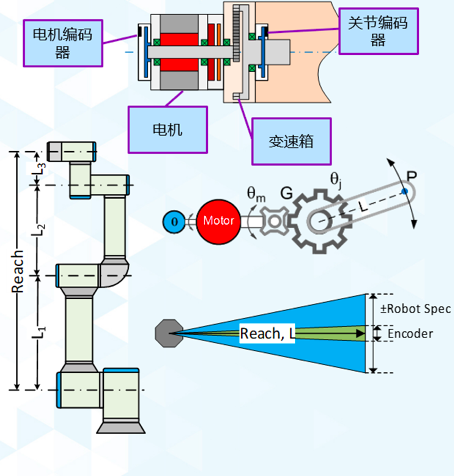
机器人架构中的编码器
具备高可靠性&精确位置信息的 AMR传感器
ADI可提供ADA4571 AMR角度传感器形式的位置传感器以用于成熟的磁编码器解决方案。借助高精度位置反馈信息,ADA4571可提高电机换向效能,改进对扭矩和速率性能的控制,在低转速应用中尤其如此。该款传感器还支持最高50,000 RPM的电机转速,而角度直接测量原理则可降低振动和噪声效应,从而消除对电机性能的影响。完善的扭矩控制能力则有利于提高电机效率,减少排放和散热,并能延长电机寿命。除此以外,低相位延迟(2µs)则可实现快速闭环控制,提高工业伺服电机、机器人、电动转向等高动态应用中的响应能力。
什么是AMR?
AMR是Anisotropic Magneto Resistance的缩写,意为各向异性磁电阻。这是一种具有施加磁场后电阻减少功能的元件,其功能取决于磁力线相对于元件的方向(各向异性)。
AMR元件的材料采用强磁性金属。
AMR元件的材料采用Ni、Fe等合金而成的强磁性金属。
由于具有正侧和负侧对称的特性,因此即使磁铁的N和S反转,也可执行相同的动作。利用此特性,可以非接触方式获取高精度、可靠的数据。此外,利用可进行这种非接触式检测的特点,还可将其灵活运用于打开、关闭检测和旋转检测、位置检测等各种应用。
输出类型:数字输出
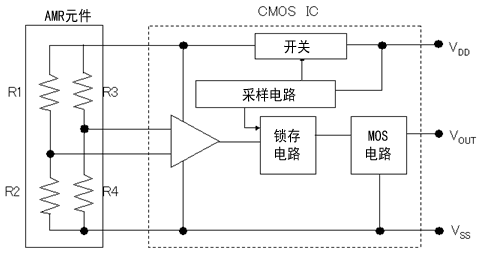
传感器在与IC和AMR元件相同的基板上形成。通过IC对AMR元件的模拟信号进行数字处理,实现了Hi、Lo级别的数字输出,因此客户无需进行信号处理。
何为AMR(磁力)传感器的灵敏度?
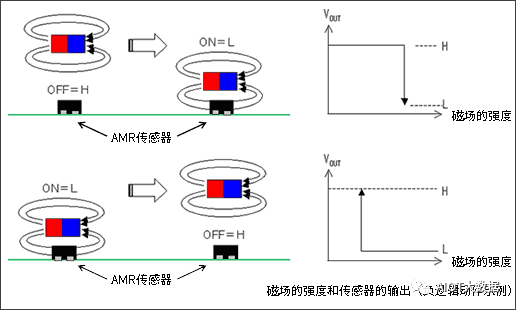
AMR传感器的灵敏度是AMR传感器打开(或关闭)时的磁力强度。在0(零)或弱磁场中处于关闭状态的AMR传感器打开时的磁力被称为ON灵敏度(Hon),而在强磁场中处于打开状态的AMR传感器关闭时的磁力则被称为OFF灵敏度(Hoff)。各AMR传感器的灵敏度之间存在差异,数据表上的Hon、Hoff仅表示该产品所处范围。
AMR传感器的优势是什么?
灵敏度和尺寸种类丰富
AMR传感器的灵敏度、响应能力和消耗电流的种类繁多,因此您可按用途选择最适合您的产品。
适用于灵活的配置和设计
即使AMR(磁力)传感器的磁铁N极和S极反转,传感器的动作也不会改变。
与霍尔IC相比,这种小型、高精度AMR传感器具有灵敏度范围更广的特性,因此磁铁和传感器的配置更加灵活,可以减少外壳和贴装时的安装误差。
此外,由于AMR传感器并非类似磁簧开关的结构部件,因此可确保其小型、可靠的特性。
磁力传感器的适用优势
磁力线是肉眼所看不见的。磁力线不会被塑料等非磁性材料吸收,而是穿透到另一面。磁力传感器就是利用这些特征进行检测的。
例如,可轻松运用于以下场景便是其一大优势。
小型且无法看到开关所在位置:笔记本电脑的打开、关闭检测和安全设备的动作设定
最适用于注重密封的构造物
气体和水等的旋转检测
易于实现防水结构
可穿戴终端的电源开关
AMR传感器的原理:磁阻元件
磁阻元件的电阻在与电流方向垂直的磁场中会发生变化。AMR传感器通过如图所示的模式配置后,即可组合电阻会发生变化的元件(R1、R4)与电阻无变化的元件(R2、R3)。
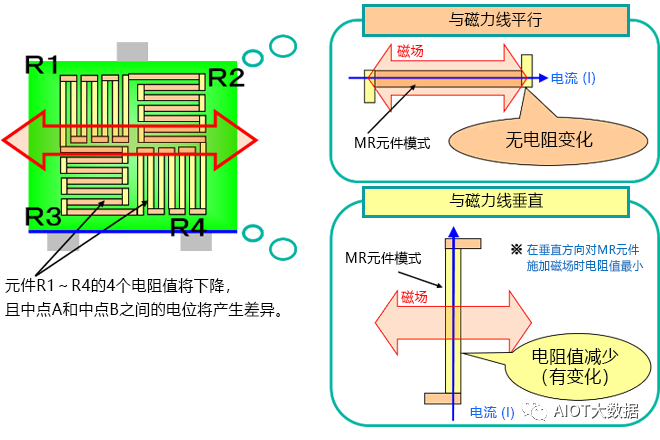
AMR传感器的动作
施加磁场后,磁阻元件R1、R4的电阻值将下降,且中点A和中点B之间的电位将产生差异。
当电位差超过规定的设置值(阈值)时,将切换传感器的ON/OFF输出。
传感器内直方图
3端子结构
磁块为单个IC封装,用于将AMR元件及其输出信号转换为数字信号。
3端子结构包括输入端子(VCC)、GND端子(GND)、输出端子(OUT),采用了搭载抑制消耗电流的采样电路结构。
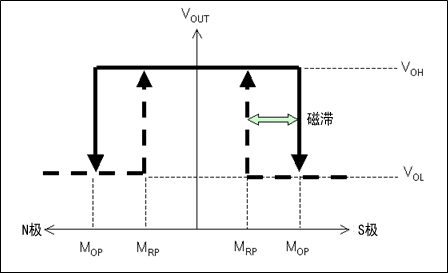
防震动
震动是指切换继电器或开关触点时,由于细微且极快的机械震动导致电力信号反复中断的现象,是造成电子电路故障的原因之一。
为防止震动的产生,已使工作磁场具有磁滞。
若磁铁靠近传感器且磁场超过MOP时,OUT即由H变为L。
若磁铁远离传感器且磁场低于MRP时,OUT即由L变为H。
与霍尔IC的区别
磁铁采用小巧轻薄的设计
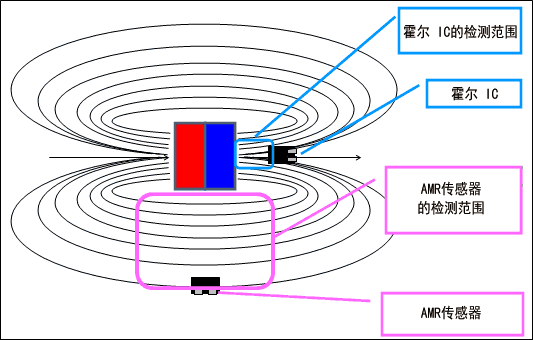
AMR传感器可使用的磁场范围更广,因此检测范围也更广。
因其检测范围较广,所以可减少外壳公差和贴装时的误差。与霍尔IC相比,具备磁铁可采用小巧轻薄的设计等优势。
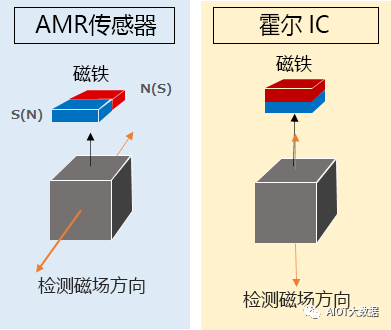
磁铁方向的不同
磁铁在传感器正上方时,霍尔IC的磁铁配置为垂直放置,而AMR则为水平放置。二者的磁场检测方向有所不同。
由于磁铁磁极附近的磁力较强,所以纵向放置磁铁时,若附近有信用卡等磁力数据,则有可能影响卡中的数据,而对于智能手机和笔记本电脑等无法垂直放置磁铁的电子设备,AMR则会显示出优势。(水平放置并不意味着磁力数据不会消失。)
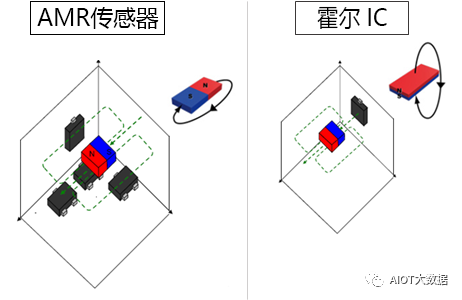
设计自由度
为检测水平磁场,可以考虑多种AMR传感器的放置方式,从而增加了设计自由度。
而霍尔IC通常定点检测垂直方向的磁场,因此会建议您将磁铁就近安装在霍尔IC的正上方,这就会限制设计自由度。
AMR传感器与霍尔IC的对比表
检测原理
传感器材料
检测方向
检测范围
| AMR传感器 | 霍尔IC | |
| 磁阻效应 | 霍尔效果 | |
| NiFe合金 |
Si (低价格,低灵敏度) InSb (高灵敏度,温度特性差) |
|
| 水平磁场 | 垂直磁场 | |
| 宽 |
窄 |
与磁簧开关的区别
灵敏度波动更小,小型且抗冲击
与磁簧开关相比,AMR传感器由于灵敏度波动较小,因此具有磁铁和传感器配置设计的自由度更高的优势。
此外,因磁力传感器尺寸较小,且可缩小您所使用的电路板并进行表面贴装,因此有助于降低贴贴成本。同时,由于磁力传感器比磁簧开关更抗震、抗冲击,因此具有易操作的优势,而其无触点的特征还会增加使用寿命。
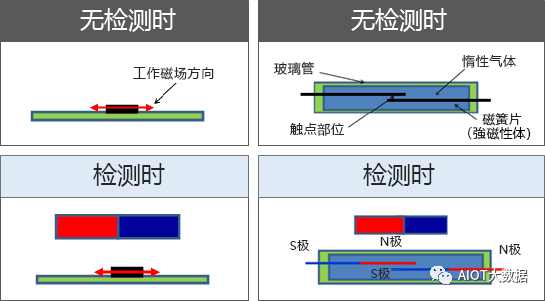
磁场检测方向相同
由于磁场检测方向相同,因此在磁簧开关中使用的磁铁有可能直接适用于AMR传感器。
然而需注意的是,由于AMR传感器的开关本身存在电路,需有电源才能运作,所以布线数量会有所不同,或传感器内部会产生消耗电流。
AMR传感器与磁簧开关的对比表
尺寸
易贴装性
灵敏度波动
抗震动、抗冲击
设计自由度
产品寿命
指向性
线制
反弹时间
最大驱动频率
| AMR传感器 | 与磁簧开 | |
|
○ AMR传感器最小封装尺寸:1.45×1.45×0.55㎜ |
× | |
|
○ 无需进行引线端子弯曲、电路板研磨等特殊加工 |
× | |
|
○ 独有的灵敏度调整功能可缩小灵敏度波动范围 |
× | |
|
○ 磁簧开关不具备抗震动、抗冲击的结构 |
× | |
|
○ 体积小巧、灵敏度波动小,因此设计自由度更高 |
△ | |
|
○ AMR传感器不存在触点寿命 |
× | |
|
狭窄 ※调整指向性 |
宽广 | |
| 三线 | 双线 | |
|
无 可实现高速处理 |
0.3ms | |
| 1~2kHz |
500Hz |
审核编辑:刘清
-
介绍一种电机速度传感器—磁阻角度传感器2023-07-11 3502
-
三大磁阻效应传感器技术对比2022-03-10 12898
-
多维科技推出 AMR132x 和 AMR134x AMR 磁开关传感器系列2023-07-21 1390
-
磁阻传感器KMA36白皮书2015-02-26 3353
-
认识AMR磁阻传感器2018-11-12 5458
-
磁阻效应传感器2009-12-02 3184
-
磁阻传感器MR的应用2011-01-09 1047
-
AMR技术简介及AMR角度传感器2017-09-12 3661
-
变磁阻式传感器有哪些类型_变磁阻式传感器的应用2019-09-14 18407
-
AMR传感器的基本特性、优势是什么2020-05-22 11459
-
AMR、GMR和TMRc传感各自有什么特色2022-02-15 11354
-
多维科技在慕尼黑电子展发布AMR磁传感器全系列产品并全面启动量产2022-11-16 2217
-
为什么AMR传感器是高精度位置测量的绝佳选择2023-02-15 3261
-
多维科技AMR磁开关传感器芯片AMR132x和AMR134x系列介绍2023-07-24 2133
-
Analog Devices Inc. AD4570 AMR磁阻传感器数据手册2025-06-27 1017
全部0条评论

快来发表一下你的评论吧 !
