

无人机导航定位技术涉及哪些方面
军用/航空电子
描述
近年来,无人机在农业、事故调查、军事、建筑、采矿、测绘和测绘测量等多个领域的应用需求急剧增长。无人机导航方案的可靠性对无人机应用的安全性起着至关重要的作用。因此,小型化、轻量化和低成本的无人机导航定位技术已经成为了研究的热点问题。
GPS全名叫Global Positioning System,全球定位系统,最早起源于美国的军事项目,美国的这种系统叫GPS,我们中国也有全球定位系统,叫北斗;俄罗斯也有,叫格洛纳斯;欧盟也有,叫伽利略。这4套全球定位系统的定位原理基本都是一样的。有了这套系统,我们就可以用它进行导航,引导我们到某地。在军事上可就厉害了,可用于精准打击,可以让导弹到全球各地去捣蛋。其实,GPS除了可以定位,还可以授时,也就是告诉你准确的时间,准确的定位与时间有密不可分的联系。
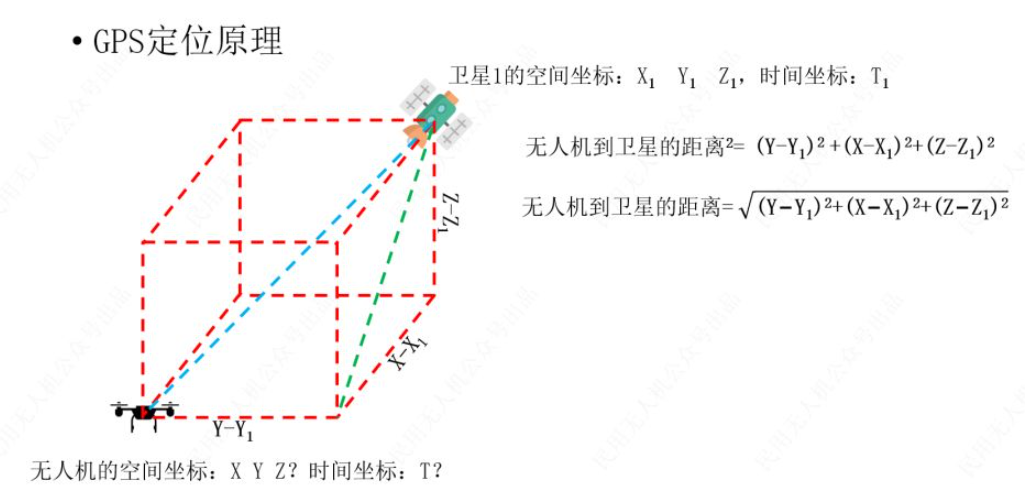
比如我们这里有一个带有GPS的无人机,假设我们不知道这个无人机的空间坐标XYZ,也不知道它的时间坐标T。但是我们可以从卫星这里接收一些信息,也就是卫星的星历,星历里面有卫星自己准确的空间坐标X1 Y1 Z1,同时也有一个准确的时间T1,因为卫星有原子钟。卫星会把这些信息发送给GPS接收机。坐标和时间其实是有一定的联系的,通过坐标和时间我们都可以算出GPS接收机与卫星之间的距离。也就是下图蓝线的长度,通过坐标计算距离就是用勾股定理,无人机到卫星距离的平方=Y-Y1的平方加上这条绿线的长度的平方,绿线长度的平方又等于X-X1的平方加上Z-Z1的平方,所以无人机到卫星的距离等于右面的式子开平方。我们再用时间来求出无人机到卫星的距离,就是信号传输的速度乘以信号传输的时间,也就是光速3⨉108再乘以T-T1。我们通过这两种方式算出的距离,实际上它们是相等的,所以我们会得到这个方程。
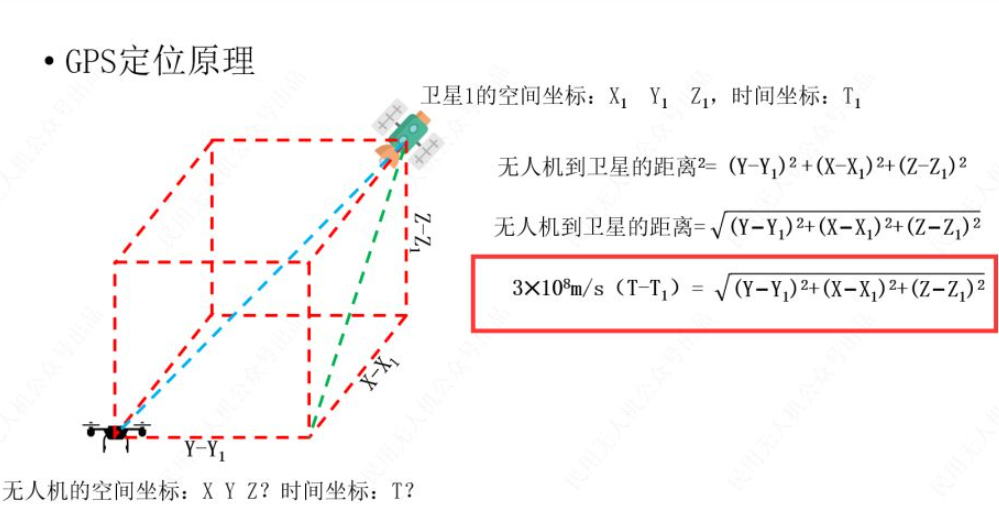
那这个方程里,有4个未知数XYZ和T,通过这一个方程我们是不能解出这4个未知数的。所以我们需要4个这样的方程才可以解出XYZ和T。所以我们再接收3个卫星的数据,我们就可以和到另外3个方程,最终我们就可以解出XYZ和T。
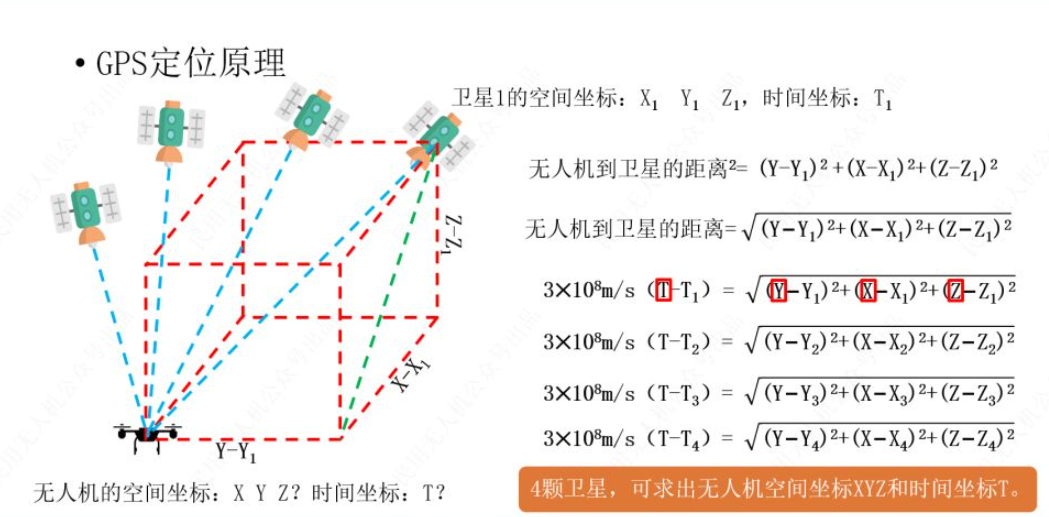
所以,GPS接收机至少要通过4颗卫星,才能确定自己的空间坐标和时间坐标。卫星定位最不好解决的问题就是误差,因为信号在传输的时候,因为大气等因素的影响,速度哪怕慢一丁点,影响都比较大,因为光速特别快,所以GPS的误差一般是在几米到几十米,想要减少误差,我们就要用差分GPS这项技术,它可以大大提高GPS的定位精度。它是在无人机相对较近的已知坐标点上布放一个GPS基准站,它也可以接收到为无人机提供位置信息的4颗卫星的信号,根据这些信号算出坐标值,然后与已知的坐标比较,得出坐标的偏差量,然后将偏差量或者实时测得的载波相位,通过数传链路或移动通信网络发送给无人机,无人机根据接收到的信息进行修正。还可以为无人机在专业的精准定位服务商购买定位服务,通过移动通信网络接收误差更正信息来更修正位置。
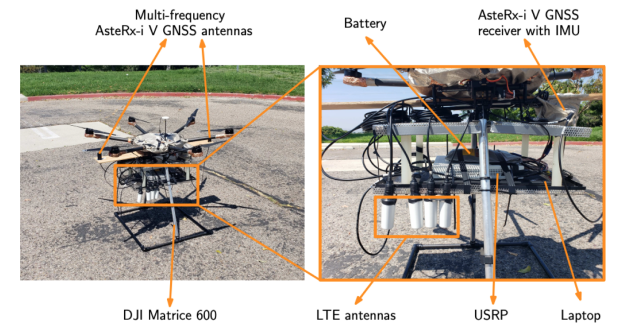
图1 实验硬件装置
GNSS(全球导航卫星系统)作为室外应用较为广泛的全球定位系统,已经发展出了多种厘米级精度的定位方式,如RTK(载波相位动态差分定位)和PPP(精密单点定位)等。但是由于全球导航卫星系统的局限性,可能无法作为未来无人机上导航系统决定性部分,主要原因是:
(1)信号在城市深峡谷中高度衰减,使其几乎不能用于数据包传送、交通管制和事故调查等若干无人机应用场景;
(2)信号极易受到有意干扰(干扰)和伪造信号的影响(欺骗),这会对军用和民用无人机的应用造成严重破坏。
在学界和业界使用融合的方法以求在满足无人机小型化、轻量化和低成本的要求上达到更加鲁棒和精准的导航定位结果。根据前人的文献总结,主要有如下三种基于无人机的导航定位技术方法:
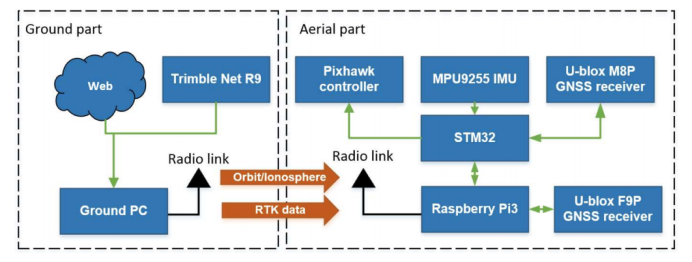
图2 运行模式
(1)RTK与MEMS松耦合方法。有研究人员使用低成本的UBlox GNSS接收机对单频RTK进行了计量应用评估,结果表明其位置精度可达厘米级。还有人获得了改进的位置和姿态确定结果。这些研究在一定程度上可以满足高精度地球参考的要求,并通过传感器集成减轻GNSS挑战环境下的弱信号问题。然而,RTK方法仍然存在很大的局限性。其中之一是有限的操作范围,即自其基地接收站的基线长度。这对单频RTK而言尤其具有挑战性,因为当基线长度达到15km或更长时,很难解决载波相位模糊的问题。因此,在松耦合、长基线情况下,当RTK的精度受限时,定位算法很难给无人机一个鲁棒且精确的定位结果。
(2)PPP与MEMS的松耦合方法。科研人员PPP测试了SUAVS,以获得厘米级定位精度。然而,他们的研究只在任务完成后和使用高端双频GNSS接收机时进行,并不能满足无人机小型化和轻量化的需求。《一种适用于小型无人机的实时低成本PPP和MEMS-INS松耦合地理参考系统的开发与测试》这篇文章中,工作人员设计了4旋翼无人机,并搭载UBlox M8P单频GNSS接收机接收GNSS数据,使用Pixhawk内部的经济型MEMS IMU(MPU9250)的流数据,而单频PPP(SFPPP)的校正数据使用3DR无线电传输,构建了PPP与MEMS的松耦合无人机导航定位系统。在周跳探测与修复的设计中,由于使用单频低成本接收机,常用的MW和GF的探测方法无法使用,科研人员使用了基于多普勒相位预测的单频PPP应答周期滑动检测方法,实验结果表明定位精度可达分米级。
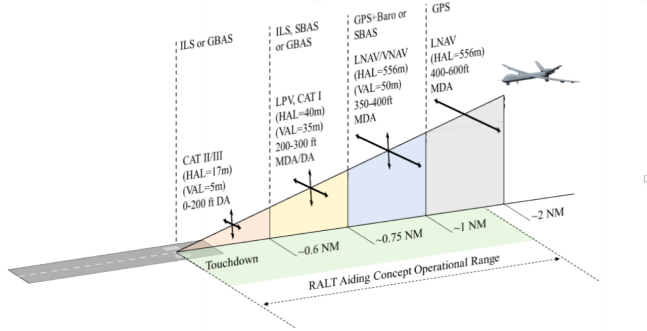
图3 RALT(雷达高度计)辅助作用距离
(3)雷达辅助GNSS定位方法。RALT(雷达高度计)辅助GNSS的方法主要旨在提高GPS的精度、完好性和连续性,以达到飞机着陆的严格导航要求。这种在垂直方向上的高精度范围能够改善整个3D位置解决方案。前人利用三个子系统的组合,以产生一个高度精确的位置,用于导航目的。第一个子系统是选定的全球导航卫星系统(GNSS),可以是双频GPS,也可以是与基于卫星的增强系统(SBAS)(即WAAS)结合使用的GPS;第二个子系统即RALT单元,是一个商用单元,它提供飞机离地高度(AGL)的测量值,用于位置计算;最后一个子系统是地形数据库,用于确定飞机在给定高度AGL的情况下高于平均海平面(MSL)的高度。三个子系统中的每一个子系统在整个系统精度中都起着重要作用。为确保系统始终满足性能要求,必须了解各种位置性能的敏感性。
下面是双天线测向RTK无人车测试——替换磁罗盘和VFH避障算法: 针对磁罗盘的这个器件的不稳定,容易受到硬磁和软磁干扰,阿木实验室在Rover这个无人车固件上用诺瓦泰617D双天线测向板卡,输出的航向信息,替换了原有的磁罗盘的航向信息。这样一来不需要对磁罗盘进行繁琐的校准,其二完全避免了硬磁和软磁干扰。在一定程度上提升了系统的稳定性。其实,在无人机上也可以替换,无人机在高空,航向信息更好些。 这套无人车系统包含:1、千寻的RTK厘米级定位;2、室外激光雷达避障(基于VFH避障策略VFH的全称是Vector Field Histogram,即向量区间柱图法);3、双天线测向替换磁罗盘测向;4、基于EKF的姿态和位置估计;5、有完整的ROS接口和MAVLINK接口。只需要传输期望的速度或者期望的位置,这个无人车底盘就可以执行避障等比较复杂的指令。
编辑:黄飞
-
国内七大无人机多模融合导航定位系统软件介绍2026-01-12 575
-
第一集 知语科技无人机反制技术与应用--无人机的定义与分类2024-03-12 4714
-
无人机的导航技术分析2023-11-29 7560
-
无人机导航技术及其特点解析2023-06-16 5998
-
无人机反制设备的原理是什么?2022-09-13 11755
-
反无人机技术的研发,无人机反制设备成为热门产品2022-09-08 28952
-
各类反无人机技术的优势2022-08-25 28006
-
无人机反制——卫星定位诱捕2022-07-28 2366
-
无人机精准导航定位会被哪些因素给影响2019-09-18 2281
-
舰载无人机测控系统关键技术研究2019-07-18 2713
-
无人机技术解答2017-11-15 29068
-
SKYLAB详解无人机GPS模块的作用及无人机gps模块选型2017-06-22 7470
-
无人机遥感技术2016-03-11 8156
全部0条评论

快来发表一下你的评论吧 !
