

自动驾驶举步维艰的求真之路
描述
每一个行业的变革,都将从疯狂逐渐走向理智,自动驾驶行业也是如此。自汽车产业出现以来,对于自动驾驶的追求便从未停歇。汽车自动化实验最早甚至可以追溯到1920年,让科技服务于人的道路上,汽车工程师们从未止步,一代又一代汽车工程师的努力,都只为了一个目的,那就是“解放人类双手”。而到了百年之后的2023年,自动驾驶似乎离我们依旧还有很远,自动驾驶的破局之路依旧遥遥无期。
在追寻真理的路上,必将困难重重,而追求真理的过程,也会有很多挑战,自动驾驶的发展,也并非一条路走到底的探索模式,更是经过了择路、验证、再放弃、再择路等不断重复的过程,自动驾驶汽车的发展也并非只要考虑技术的可行性,作为服务大众出行的一项关键技术,如何让大众消费者可接受更是非常重要的,自动驾驶的求真之路举步维艰。
激光雷达,技术的非必要选择
自动驾驶的实现离不开感知、决策、执行这3个非常重要的核心技术,从感知层面来说,更为完善的交通信息将让自动驾驶汽车可以更加安全地完成行驶任务。作为让自动驾驶汽车可以清晰看到路况的重要技术,现阶段的自动驾驶感知主要是通过在汽车上加装感知硬件,激光雷达由于其感知精度高、探测信息全、抗干扰能力强等优势,在自动驾驶感知硬件的选用上一直处于优势地位,以Waymo为代表的自动驾驶企业更是将激光雷达作为主要的感知硬件。
国内的诸多造车新势力也对激光雷达喜爱有加,不同车企在激光雷达安装位置、数量、扫描方案的选择上,也都存在差异。其中,以蔚来 ET7、理想 L9、智己 L7 为代表的车企在车顶安装激光雷达,以极弧 S、小鹏 G9 为代表的车企在保险杠安装激光雷达,以及集度则为首家在前机盖安装激光雷达的品牌。在安装数量方面,厂商搭载的激光雷达数量从 1 到 4 颗不等,普遍搭载 2 颗以上激光雷达。
激光雷达是促使自动驾驶从0到1的关键部件,也是诸多车企展现自身自动驾驶实力的重要宣传配件。激光雷达的装载似乎已经与自动驾驶画上了等号,凡是自动驾驶的技术上就离不开激光雷达,而在搭载有激光雷达的汽车上,其宣传重点一定是L2,甚至L3级自动驾驶。
有龙的世界一定会有屠龙者,自动驾驶行业也是一样,在大家都默认激光雷达是自动驾驶实现必不可少的配件时,特斯拉的出现让自动驾驶出现了新的可能。由于激光雷达的成本过高,因此众多装载激光雷达的汽车的购买费用,让很多人望而却步,这也是导致以激光雷达为主要感知硬件的技术方案未能大概率普及到中、低端车型上的原因。
车载摄像头作为主要感知硬件的自动驾驶模式劈开了自动驾驶行业激光雷达不可或缺这一观念的口子,通过采用在车辆上加装车载摄像头作为主要感知硬件的纯视觉感知方案,特斯拉所走的自动驾驶道路,让自动驾驶汽车更像“人”。通过车载摄像头采集交通环境的图像数据,经过复杂的感知神经网络架构进行处理,构建真实世界的三维向量空间,让自动驾驶汽车可以理解和认识到交通环境。
特斯拉的出现让自动驾驶摆脱激光雷达成为了现实,也让激光雷达成为自动驾驶技术实现的非必要选择,也在自动驾驶感知硬件的选择上撕开了一道口子,提出了另一种可能。
高精度地图,离开舞台的中央
高精度地图,作为弥补感知硬件不足,让自动驾驶汽车可以更加安全行驶的重要技术,在自动驾驶出现后,就一直承担着非常重要的角色,在近几年自动驾驶发展中,高精度地图似乎是必需品。作为“上帝之眼”,高精度地图让自动驾驶汽车可以感知到其他感知硬件无法探测到的距离,让自动驾驶汽车可以提前了解前方路况,提前准备。
相较于普通的导航地图,高精度地图具有高精度、多数据、准定位等优势,像是道路的弯度、坡度、车道线位置、类型、宽度、交通信号灯、交通标识、路边地标等元素,均可以在高精度地图中呈现。高精度地图,就像是自动驾驶汽车的一根拐杖,让自动驾驶汽车可以更加平稳地走路。
进入了2023年,自动驾驶行业也迎来了新一轮的发展,高精度地图对自动驾驶汽车的不可替代性不言而喻,但其发展更是困难重重。2023年的自动驾驶行业,“重感知,轻地图”的概念逐渐成为主流,小鹏、华为、蔚来、理想、地平线、毫末智行等等国内驾驶辅助的“第一梯队”相继宣布,未来将会采用以车辆自身传感器为主,高精地图为辅的策略继续发展自动驾驶(高级辅助驾驶)技术。
之所以众多车企有如此统一的看法,主要是因为高精度地图构建的难度大、成本高,根据《智能网联汽车高精地图白皮书》的说法,采用传统测绘车方式,分米级地图的测绘效率约为每天每车500公里路,成本为每公里10 元左右。此外,在道路出现人为性拥堵、道路标识更换的时候,高精度地图如何及时响应也是一个难题,为了让自动驾驶汽车在任何情况下都可以安全驾驶,这就需要高精度地图能及时更新,这一系列的要求让自动驾驶落地成本进一步提升。
特斯拉FSD和Mobileye的REM都采用了众包地图的概念,即每一辆搭载该系统的车辆都是测绘车。将行驶过程中采集的数据上传到云端,形成新的动态图层,搭载该系统的车辆越多,地图越精确,更新越及时。这种方案虽然可以解决高精度地图无法及时更新的问题,但却带出了更多的问题,由于高精度地图所含的交通信息非常丰富,如果使用不当,将导致重要的信息泄漏,为此国内对于高精度地图的采集,在法律上提出了更为严苛的要求,这也导致高精度地图的采集难度进一步提升。
如果只有使用高精度地图才能让自动驾驶落地,对于部分不允许采集高精度地图的地方,自动驾驶将无法实现,这也让自动驾驶技术无法真正普及。高精度地图,是自动驾驶的拐杖,也是自动驾驶的牢笼,只有“轻地图、重感知”,才能让自动驾驶真正落地,这也是诸多车企提出这一方案的主要原因。
依靠高精度地图的自动驾驶发展路径已经走进了一个死胡同,如果继续走下去,很难看到出口,或许只有找到其他方向,才是破局之路。
智能网联,从一而终的选择
智能网联还是单车智能,或许自自动驾驶出现以来,就是一个热点话题。2023年7月由工业和信息化部、国家标准化管理委员会印发的《国家车联网产业标准体系建设指南(智能网联汽车)(2023版)》提到,到2025年,系统形成能够支撑组合驾驶辅助和自动驾驶通用功能的智能网联汽车标准体系。到2030年,全面形成能够支撑实现单车智能和网联赋能协同发展的智能网联汽车标准体系,至此智能网联的发展有了进一步的明确方向。
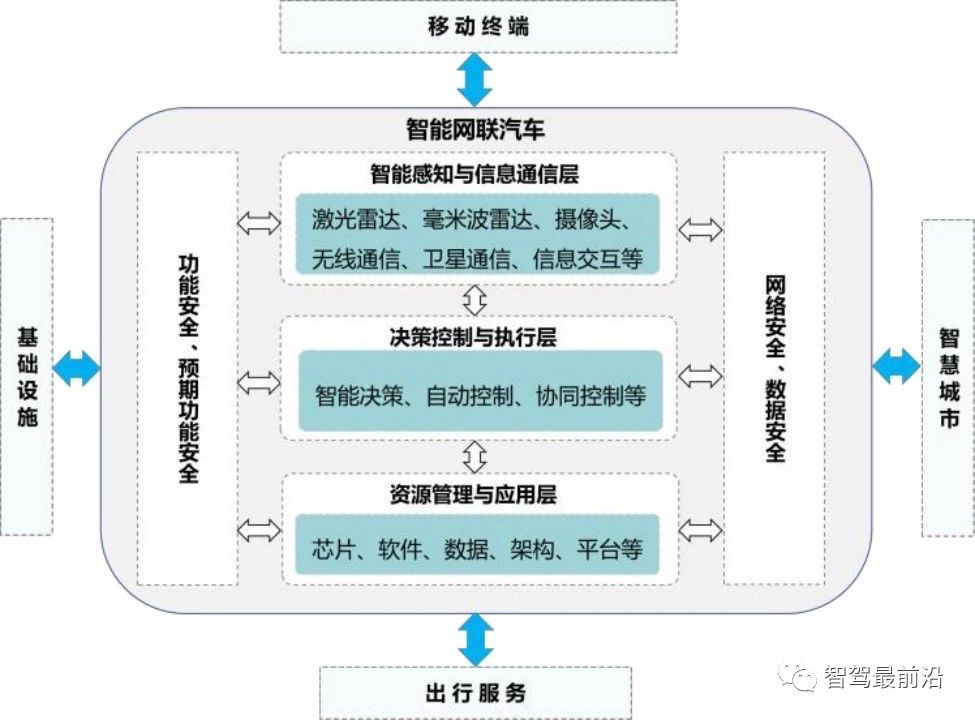
智能网联汽车即具备环境感知、智能决策和自动控制,或与外界信息交互,乃至协同控制功能的汽车。智能网联汽车标准体系横向以智能感知与信息通信层、决策控制与执行层、资源管理与应用层三个层次为基础,纵向以功能安全和预期功能安全、网络安全和数据安全通用规范技术为支撑,形成“三横两纵”的核心技术架构,完整呈现标准体系的技术逻辑,明确各项标准在智能网联汽车产业技术体系中的地位和作用。同时结合智能网联汽车与移动终端、基础设施、智慧城市、出行服务等相关要素的技术关联性,体现跨行业协同特点,共同构建以智能网联汽车为核心的协同发展有机整体,更好地发挥智能网联汽车标准体系的顶层设计和指导作用。
智能网联汽车与单车智能从来都不是一个选择题,而是一个循序渐进的关系,在汽车“新四化”出现以后,电动化、智能化、网联化、共享化发展路径已非常明确,单车智能发展到一定阶段后,高级辅助驾驶将实现普及,L3级自动驾驶将实现,但L5级自动驾驶的落地,则需要智能网联技术的加持。
当参与交通的所有车辆信息互联后,整个交通将成为一个整体,所有的车辆的行驶路径和方案将由一个大脑统一进行控制,拥堵、碰撞将不再出现,自动驾驶将成为现实。智能网联在自动驾驶出现后或许被否定过,但最终成了从一而终的选择,虽然智能网联的实现需要政府部门的大力支持,其实现过程依旧有很长一段路要走,但这条路或许是自动驾驶的必经之路。
审核编辑 黄宇
-
华为海外5G布局举步维艰,韩国竞标落选2018-09-19 4328
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8402
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14382
-
自动驾驶真的会来吗?2016-07-21 14605
-
自动驾驶的到来2017-06-08 7479
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7588
-
迈向自动驾驶和电动汽车之路研讨会2018-10-25 3164
-
如何让自动驾驶更加安全?2019-05-13 3784
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2929
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2487
-
自动驾驶技术的实现2021-09-03 3268
-
国家力推IPv6举步维艰 主要有六大原因2018-02-05 6140
-
成为一名软件工程师,备受煎熬和举步维艰2018-03-06 5241
-
是什么导致自动驾驶车的量产举步维艰?2018-08-24 3984
-
国产存储技术的发展是举步维艰的2019-08-01 993
全部0条评论

快来发表一下你的评论吧 !
