

单片机常用通信协议之UART通信简介
控制/MCU
描述
UART通信简介
UART即通用异步收发器(UniversalAsynchronousReceiver/Transmitter),和IIC一样,其总线构成只有两根线,即TX和RX,但其可以同步收发,故UART为异步、全双工的串行通信方式;其在嵌入式单片机领域具有极其广泛的应用,如通常的串口通信:RS232、RS485、RS422、TTL等。
UART通信允许两个时钟不同的设备进行通信,其原理就是通过双方约定相同的波特率(即单位时间内传送的码元符号的个数,它是对符号传输速率的一种度量)和数据帧格式(即数据位数,校验方式,停止位等)进行数据的收发,波特率的单位是每秒比特数(bps),常用的波特率有:1200bps,2400bps,4800bps,9600bps,19200bps,38400bps,57600bps,115200bps,921600bps等。
UART通信的实现需要两根通信线:TX和RX,其中TX用于数据的发送,RX用于数据的接收,其中主机的TX接设备的RX,主机的RX接设备的TX。
UART通信协议
要实现双方通信则先要定义双方的通信的波特率,然后再进行数据的收发;下面来介绍一下UART通信中的数据帧是怎样的:
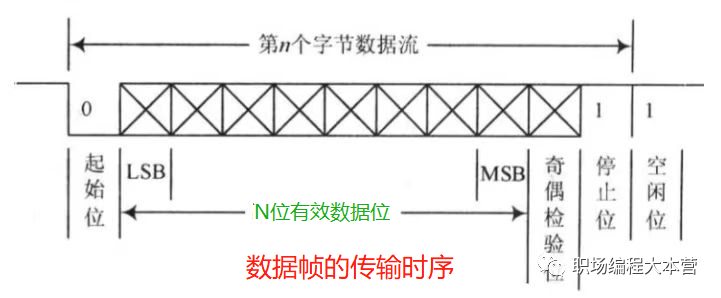
- 起始位:标志数据传输开始,发出一个逻辑电平为0的信号标志为起始位;
- bit数据位:即实际通信中数据bit位数,常用的数据位一般配为5或6或7或8,LSB低位先行;
- 奇偶校验位:发送数据的校验可以为无校验、奇校验、偶校验;奇校验:数据位中1的个数为偶数,则校验位为1,否则为0;偶校验:数据位中1的个数为偶数,则校验位为0,否则为1;
- 停止位:标志当前数据传输的结束,可配为1位、1.5位或2位的逻辑电平1.
- 空闲位:处于逻辑电平1状态。
一帧完整的数据是由1位起始位、5到8位数据位、0到1位校验位、1/1.5/2位停止位构成,如下图数据帧的传输时序示例所示:
UART通信特点
- 不需要同步时钟线,只需要约定好波特率及数据帧格式即可通过TX、RX收发数据,因此其线路相对比较简单,且成本低;
- 可实现双向异步通信;
- 双方可根据具体的需要来约定具体的传输数据包格式,便于用户进行开发;
- 因其高低电平用0和1表示,通信的抗干扰能力差,数据的通信容易受线缆的影响,通信距离偏短。
UART相关代码
UART在我们开发中最常用到的功能就是串口调试功能,以下附上软件UART串口的相关代码供大家参考:
void uart_init(void)//uart初始化
{
UART_InitTypeDef UART_InitStructure;
GPIO_PinRemapConfig(GPIOA, GPIO_Pin_0 | GPIO_Pin_1, GPIO_Remap_0);
UART_InitStructure.UART_BaudRate = 115200;
UART_InitStructure.UART_WordLength = UART_WordLength_8b;
UART_InitStructure.UART_StopBits = UART_StopBits_1;
UART_InitStructure.UART_Parity = UART_Parity_No;
UART_Init(UART0, &UART_InitStructure);
}
以上初始化主要为配置相应IO口复用为UART模式(TX脚配为复用推挽输出,RX脚配为浮空输入),配置串口波特率为115200、数据位为8位、1位停止位、无校验位。
//重定位C库函数printf到UART0, 发送一字节数据到UART
int fputc(int c,FILE*f)
{
while(!UART_IsTXEmpty(UART0));
UART_SendData(UART0, (uint8_t) ch);
return ch;
}
//重定位C库函数scanf到UART0,等待串口输入数据
int fgetc(FILE *f)
{
while(UART_GetFlagStatus(UART0,UART_FLAG_RXNE) == RESET);
return(int)UART_ReceiveData(USART0);
}
-
单片机系统中最常用的通信协议有几种2022-02-17 1497
-
UART通信协议的相关资料推荐2022-01-25 1906
-
单片机串口通信协议的实现实例分享2022-01-20 1147
-
UART串口通信协议的相关资料分享2022-01-18 1292
-
单片机常用的通信协议有哪几种呢2021-12-02 2498
-
基于STM32之UART串口通信协议(一)详解2021-11-30 1733
-
单片机常用的通信协议有哪些2021-11-18 1681
-
单片机:Modbus 通信协议介绍2021-11-13 1378
-
单片机常用的几种通信协议2021-11-11 1288
-
STM32F4串口通信简介2021-08-18 1767
-
单片机通信协议有哪一些常用的2019-12-10 4720
-
单片机通信协议的应用情况2019-11-09 5155
-
浅析六种常用的单片机通信协议2019-11-08 17479
全部0条评论

快来发表一下你的评论吧 !
