

在Zynq裸机设计中使用视觉库L1 remap函数的示例
描述
简介
本篇博文旨在演示如何在 Zynq 设计中使用 Vitis 视觉库函数 (remap) 作为 HLS IP,然后在 Vitis 中使用该函数作为平台来运行嵌入式应用。
remap 函数会从图像中某一处提取像素,并将其重新放置到另一张图像中的某一处位置。在此示例中,本设计将使用一张 128x128 像素的灰阶输入图像,在输出上将其水平翻转。
此操作已在如下设置中经过测试:
版本:Vivado 和 Vitis 2023.1
操作系统:Ubuntu 20.04.1 LTS
器件:Zynq UltraScale+ ZCU104 评估板 (xczu7ev-ffvc1156-2-e)
第 1 节 - 创建 Vitis HLS IP 工程
在本节中,我们将使用 Vitis Vision L1 视觉库提供的现有 Makefile 创建并导出 remap 函数,以供在 Vivado 工程中使用。
请在您所选位置打开终端,将 Vitis 库的最新仓库克隆到该位置:
git clone https://github.com/Xilinx/Vitis_Libraries
进入到Vision L1下的remap文件夹:
cd Vitis_Libraries/vision/L1/examples/remap
注释:视觉库需要 OpenCV 库才能对函数进行编译。请使用以下链接中提供的指导信息来编译 OpenCV 并设置所需的环境变量,然后再运行下一步。
https://support.xilinx.com/s/article/Vitis-Libraries-Compiling-and-Installing-OpenCV?language=zh_CN
设置 Vitis/Vivado 工具,然后运行 HLS 工程脚本以创建 HLS 设计,并导出该函数作为 Vivado IP。
make run PLATFORM=xilinx_zcu104_base_202310_1 VIVADO_SYN=1
PLATFORM - 这是开发板平台名称,通常可通过 PLATFORM_REPO_PATHS 环境变量找到,或者位于 Vitis 安装位置的
VIVADO_SYN - 该实参用于通过export_design 进程运行 Vitis HLS 工程,此进程会提供一个 ZIP 工程文件作为 Vivado IP。
您可选择通过如下命令打开 Vitis HLS 工程以查看结果和报告:vitis_hls -p remap.prj
注释:由于此 Vitis HLS 工程衍生自 Makefile,因此它不含 GUI 中用于直接重新运行 C 语言仿真或协同仿真所必要的标志和实参。您可检查 remap 文件夹中的 run_hls.tcl 文件,查看要为仿真添加的必要标志和实参。
或者,也可以重新运行以上 make 命令,添加相应的变量以便从命令行运行仿真(例如,CSIM=1 和/或 COSIM=1)。
第 2 节 - 创建 Vivado 平台工程
本节将逐步讲解如何以 ZCU104 作为目标器件,使用上一节中创建的 Vitis HLS IP来创建定制平台。
将上一节中创建并导出的 IP 复制到其自身的仓库位置中,然后打开 Vivado。
cd ../../../../.. #back to your base project directory
mkdir ip_repo
cp Vitis_Libraries/vision/L1/examples/remap/remap.prj/sol1/impl/ip/xilinx_com_hls_remap_accel_1_0.zip ./ip_repo
cd ip_repo
unzip xilinx_com_hls_remap_accel_1_0.zip -d remap_ip
cd ..
vivado
使用以下步骤创建并设置工程:
选中“Create Project”,单击“Next”
输入“Project Name”:remap_vivado,单击“Next”
选中“RTL Project”,此时请勿指定源文件,单击“Next”
在“Boards”选项卡上,选中“Zynq UltraScale+ ZCU104 Evaluation Board”,单击“Next”,然后单击“Finish”
打开工程后:
在左侧 Flow Navigator 中依次单击“Project Manager > Settings”
选择“IP > Repository”,单击“+”并添加 ip_repo 文件夹所在位置,然后关闭各窗口。
此时即可添加定制 IP 和其他平台块:
在左侧 Flow Navigator 中,依次单击IP Integrator > Create Block Design
为模块框图选择一个描述性名称,或者保留默认名称,然后单击“OK”
单击“+”添加 IP,然后选中 Remap_accel IP
单击“+”添加 IP,然后选中 Zynq UltraScale+ MPSoC IP
单击窗口顶部功能区中的“Run Block Automation”
确保已选中“Apply Board Preset”,然后单击“OK”。
现在,我们将配置 Zynq UltraScale+ MPSoC IP核,使其通过相应接口与此 IP 进行通信:
双击框图中的 Zynq UltraScale+ MPSoC IP核,执行以下更改。我们将为此设计关闭部分不使用的功能。
I/O Configuration:全部展开
Low Speed
Memory Interfaces
取消勾选 QSPI
取消勾选 SD 1
I/O Peripherals
取消勾选 CAN 1
High Speed
GEM
取消勾选 GEM 3
USB
取消勾选 USB 0(同时禁用 USB 3.0)
取消勾选 Display Port
取消勾选 SATA
PS-PL Configuration
PS-PL Interfaces
Master Interface
取消勾选 AXI HPM1 FPD(我们只需使用一个主接口即可)
Slave Interface
AXI HP
勾选 AXI HP0 FPD
完成上述更改后,单击“OK”对 Zynq UltraScale+ MPSoC IP核应用保存这些更改。
现在,我们可以使用自动连接将各IP彼此相连:
单击“Run Connection Automation”
选中“All Automation”并单击“OK”
单击“Run Connection Automation”(这第二轮运行将把属于此 IP 的其他 AXI 接口都连接到互连结构中)。
选中“All Automation”并单击“OK”
现在,设计应该如下所示,您可单击工具栏中的“regenerate layout”来自动重新排列各IP: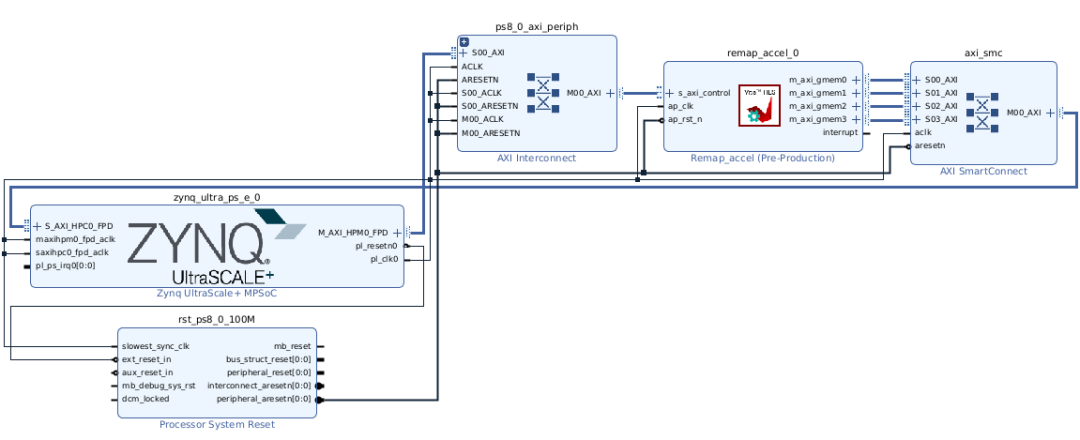
检查“Address Editor”选项卡。请注意,地址均为默认自动分配的地址,并且AXI 和 IP 控制的地址空间分别设为 0x0 和 0xA000_0000。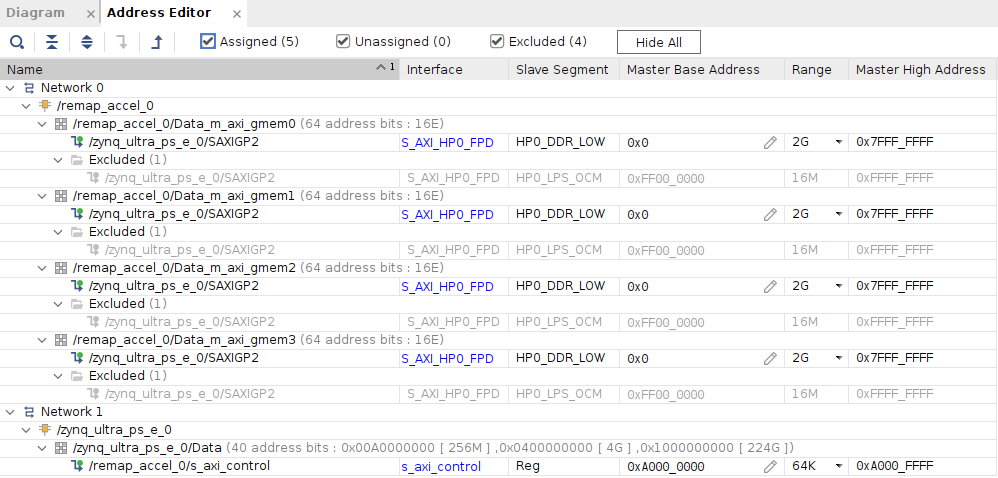
回到“Diagram”选项卡中,单击工具栏上的“Validate Design”按钮,或者使用 Vivado 主窗口中的“Tools > Validate Design”确保设计不存在任何错误。
在“Sources”窗口的“Sources”选项卡中,展开“Design Sources”,右键单击当前block design,单击“Create HDL Wrapper”并选中“Let Vivado manage wrapper and auto-update”,然后单击“OK”。
在左侧 Flow Navigator 中,单击“Generate Block Design”,保留默认选项,然后单击“Generate”。您可在“Design Runs”选项卡中监控运行状态。
完成后,单击“Generate Bitstream”并单击“Yes/OK”运行必要的流程来生成比特流。待生成bit文件后,您可单击打开的对话框中的“Cancel”以继续而不执行任何操作。
现在,我们可将硬件平台导出成 XSA文件 以供 Vitis 用于我们的应用。
在顶部工具栏上,依次单击“File > Export > Export Hardware”
选择“Next”
选择“Include bitstream”,单击“Next”
设置 XSA 文件名:remap_platform,单击“Next”,然后单击“Finish”。默认情况下,输出 XSA 文件将保存在工程的基本位置。
第 3 节 - 创建 Vitis 应用工程
鉴于已从 Vivado 导出平台,我们可以使用此文件来定义自己的平台并创建应用,以便在该平台内与 IP 通信并运行 IP。
打开 Vitis,然后导入 XSA:
vitis -workspace remap_ws
这将打开 Vitis GUI,并采用“remap_ws”作为工作空间。
创建应用工程
单击“Next”
从顶部选项卡中选择“Create a new platform from hardware (XSA)”,浏览找到上一节中的 remap_platform.xsa 文件,然后单击“Next”
设置应用工程名:remap_project,选中 psu_cortexa53_0 作为处理器,然后单击“Next”
保留默认域信息(独立操作系统),然后单击“Next”
选择“Empty Application (C)”模板,然后选择“Finish”
下载本文随附的参考文件。将这些文件解压到工程的基本目录中。
在“Explorer”窗口中,展开“remap_project_system > remap_project > src”,右键单击 src 并选中“Import Sources”,浏览找到保存的参考文件,选中并导入以下文件:
remap_example_app.c
remap_input_image.h
remap_x_map.h
remap_y_map.h
导入这些文件后,即可验证 remap_example_app.c 文件以确定应用正在执行的操作。总而言之,该应用会以 DDR 存储器中的输入图像和映射阵列数据来配置此 IP,并指令此 IP 处理数据,然后将其写回 DDR 存储器中。
此时即可构建平台并编译应用,以供在 ZCU104 评估板上直接运行。
在“Assistant”窗口中:
选中“remap_platform [Platform]”,使用构建按钮(锤子图标),等待出现“Build Finished”消息。
选中“remap_project_system [System]”,使用构建按钮(锤子图标),等待出现“Build Finished”消息。
创建过程所需时间因您的系统而异,可能耗费较长时间。
第 4 节 - 在硬件上运行应用
此时即可运行设计并验证 remap 函数的操作。
在“Assistant”窗口中,选中“remap_project_system [System]”,选中“Launch Hardware”并使用绿色“Run”图标。
运行完成后,请在器件仍在运行时选中 XSCT 窗口。如果此窗口未打开,请选择“Vitis > XSCT Console”
在控制台中运行以下命令:
xsct% source remap_memory_copy.tcl
注释:此脚本包含在参考文件内。您也可以指定指向该文件的完整路径,或者使用 cd 进入到相应的目录。
此脚本将读取存储器中的“input_buffer”和“output_buffer”数据,并将数据分别另存为 input.data 和 output.data。请等待出现完成消息后再继续操作。
创建 input.data 和 output.data 文件后,您即可运行 Python 脚本来确认 remap 函数是否已执行图像的水平翻转。按如下方式运行 Python 脚本:
python3 remap_convert_image.py
注释:此脚本需安装下列 Python 包:numpy 和 Pillow。这些包通常是通过 pip install numpy 命令和 pip install Pillow 命令来安装的。
此脚本将输出 input.png 和 output.png 这两个文件,分别表示发送到器件的输入图像和通过 IP 传递后的输出图像。
-
HAL库的函数调用示例2024-12-02 3450
-
L1辅助驾驶到L4自动驾驶的五个示例系统2023-10-04 1745
-
如何在Vitis HLS GUI中使用库函数?2023-08-16 2629
-
Vitis 库流程:视觉 L1 重映射函数 Zynq baremetal 设计实例2023-07-13 1359
-
视觉L1重映射函数Zynq baremetal设计实例2023-07-07 1774
-
在STM32 F0、F2、F3、F4和L1系列MCU中使用硬件实时时钟(RTC)2022-11-21 868
-
CUP缓存(L1、L2、L3)是什么2022-10-14 13989
-
开关上的l l1 l2是代表什么2022-01-29 93824
-
STM32 之 标准外设版USB驱动库详解(架构+文件+函数+使用说明+示例程序)2021-12-08 1680
-
比亚迪采用基于赛灵思 Zynq SoC L0/L1 前置摄像头的ADAS 方案2018-12-21 1305
-
Zynq中使用FreeRTOS的空闲钩子函数时在SDK中的设置2017-03-09 3106
-
OpenCV3编程入门-源码例程全集-remap函数用法示例2016-09-18 982
-
转:开始打怪——L1缓存2016-08-12 5797
-
remap函数用法示例2016-06-06 540
全部0条评论

快来发表一下你的评论吧 !
