

KUKA机器人视觉抓取的工作原理
描述
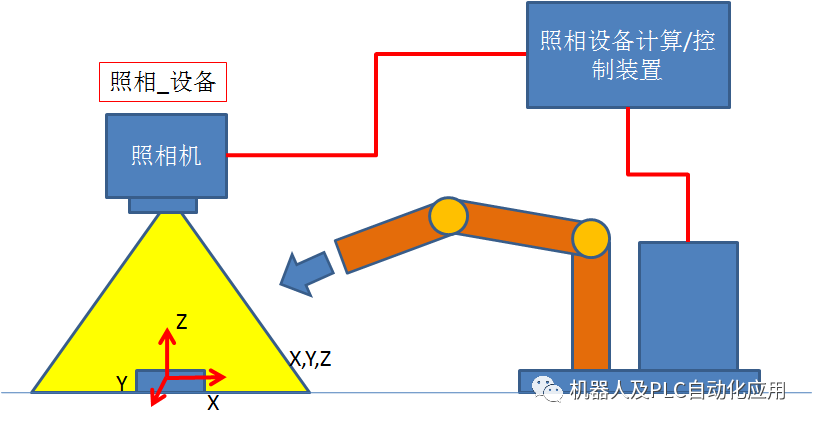
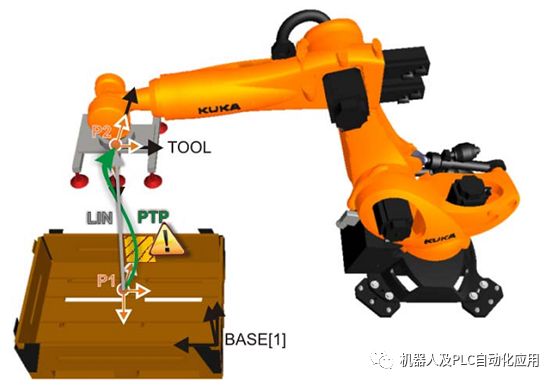
首先要建立机器人的轨迹,作为基础机器人编程轨迹.
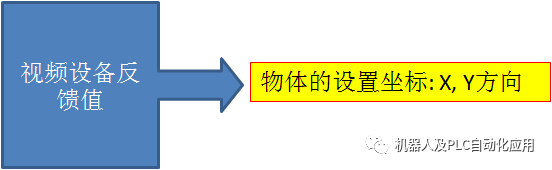
视觉抓取主要是通过改变机器人的TOOL坐标系或BASE坐标系来实现的.
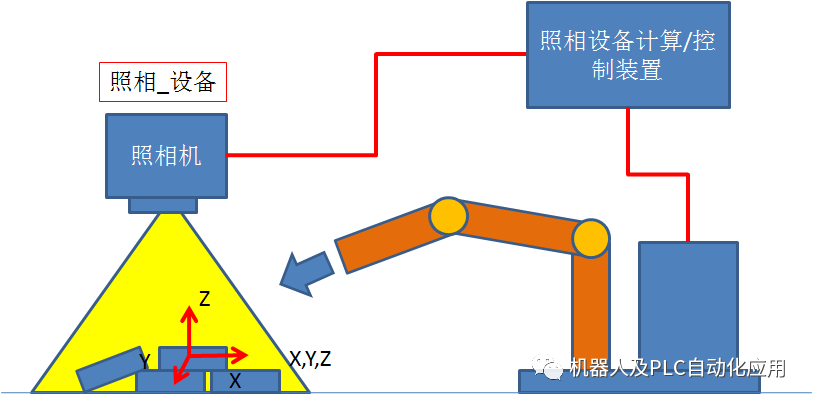
物体位置的变化主要是它位置的X,Y,Z 方向的变化.
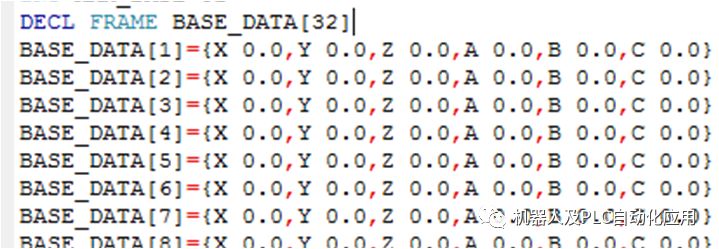
BASE坐标系: 可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。
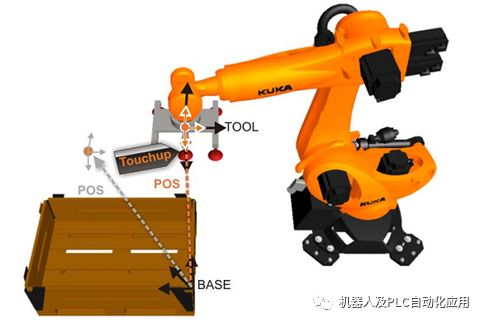
以改变BASE 坐标系为例:
KUKAC4 现在可以使用32个BASE 坐标系
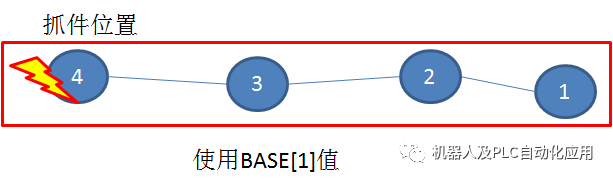
没有使用视觉补偿功能时,只用一个BASE坐标系.
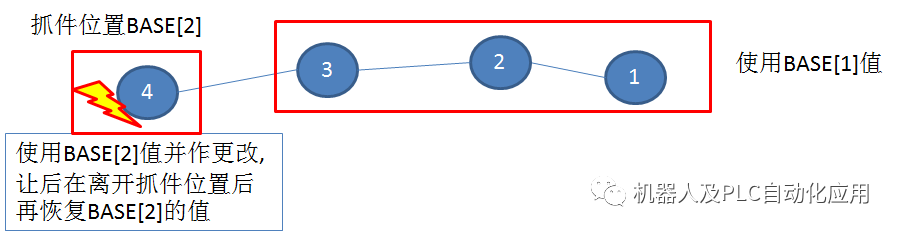
改变机器人BASE坐标系值从而改变机器人抓件位置,使用多个坐标系.
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于视觉的自主导航移动抓取机器人搭建方案2023-12-19 1927
-
基于视觉的机器人抓取系统设计2023-08-19 3287
-
浅谈机器人视觉抓取的目的2023-03-30 1206
-
KUKA机器人视觉抓取的工作原理2022-09-16 1089
-
KUKA机器人伺服驱动模块维修2021-09-17 1877
-
工业机器人与视觉实训平台介绍2021-07-01 1930
-
KUKA机器人视觉抓取的工作原理及Ethernet KRL软件控制讲解2020-07-11 8481
-
KUKA机器人视觉抓取的工作原理讲解2020-06-12 7904
-
【MYD-CZU3EG开发板试用申请】基于机器视觉的工业机器人抓取工作站2019-09-18 2108
-
KUKA机器人问题解答2019-07-15 2621
-
工业机器人的工作原理2017-12-15 4785
-
KUKA重型机器人2015-02-03 8315
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
全部0条评论

快来发表一下你的评论吧 !
