

7种提高机器视觉检测精度的方法分享
工业控制
描述
在实际场景中,机器视觉检测设备在检测产品时的一些不稳定因素,会直接导致检测精度与效率受到很大的影响。
下面小矩就和大家一起分析如何根据分辨率,精度,公差的关系指导选型,以及视觉检测设备检测中不稳定的因素。
01根据分辨率 精度 公差进行选型
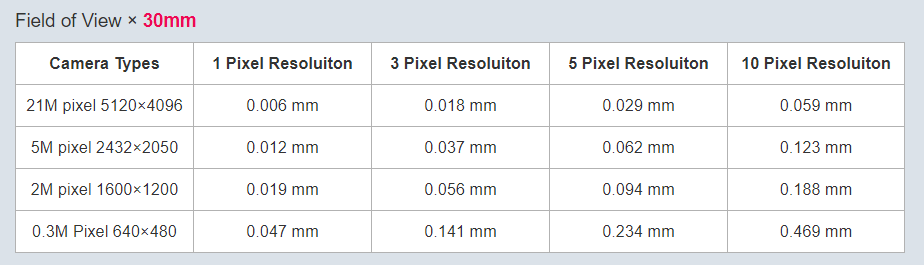
分辨率(Resolution)
计算公式:分辨率 = 视野(Field of View)/像素(Pixel)
比如我要看的产品大小是30mm*10MM,使用200万像素(1600pixel*1200pixel)的相机。因为产品是长条形,为了把产品都放入到视野内,我们计算分辨率的时候要考虑长边对应,此时分辨率为:
分辨率 = 30mm/1600Pixel = 0.019mm/Pixel
精度(Accuracy)
计算公式:精度 = 分辨率 x 有效像素
精度的单位是mm。根据产品表面和照明状况的不同,我们可以通过放大图像观察辨别稳定像素的个数,从而得出精度。如果条件不允许实际测试观察,一般的规律是,如果使用正面打光,有效像素为1个,使用背光,有效像素为0.5个。
这个例子我们取1 Pixel,得到精度为0.019mm约等于0.02mm。
机器视觉系统的定位精度如何计算?
假如是30万像素的摄像机,监控的面积为640x480mm,其精度是不是就是1mm了?
30W相机分辨率640*480 正常这样算:用最长的边除去监控面积最长的边 即可,所以精度基本上是1mm,这个是理论值,如果你做测量或者表面划伤检测,肯定不准确,一个像素有可能无法凸显特征。
公差(Tolerance)
一般情况下,精度和公差的对应关系如下:

对一个项目来讲,我们是先从图纸上读到公差的要求。然后再根据上述关系,反推得出我们需要多少像素的相机。
测量时,首先要考虑的几大方面的有:相机、镜头、光源。
选择要考虑的因素有很大,这里依据一个经手的项目介绍一下精度方面需要考虑的问题。
项目要求:像素精度0.05mm、测量误差正负0.15mm。首先介绍一下相关的概念:
像素精度:一个像素在真实世界代表的距离,即拍摄视野/分辨率。例如我所使用的大华500万相机,分辨率2592*2048,在视野中长的一边100mm,即可拍到100mm的物体,那么在这一方向的像素精度为100/2592mm约为0.0386mm。
测量误差:使用算法测量的距离/长度与真实值的误差。
亚像素精度:亚像素精度是指相邻两像素之间细分情况,输入值通常为二分之一,三分之一或四分之一。即每个像素将被分为更小的单元从而对这些更小的单元实施插值算法。
例如,如果选择四分之一,就相当于每个像素在横向和纵向上都被当作四个像素来计算。实际测量或检测时需要考虑的还有很多,例如帧率、曝光、增益等。
02影响机器视觉检测设备精度的因素
视觉检测设备不稳定因素:工业相机
工业相机的挑选关键考虑到其传感器类型、像素和帧数,在其中控制器分CCD与CMOS二种,CMOS光学镜头处理速度高,各元器件、电源电路中间间距很近,影响情况严重,显像噪音高。
CCD控制器照相机相对性于CMOS照相机具备敏感度高、噪音低和响应时间快的特性,在稳定性层面,CCD照相机的耐冲击与振动性也较强,一般来说,CCD控制器照相机在显像品质上和稳定性层面要好于CMOS照相机。
视觉检测设备不稳定因素:光源
光源具备变大图象的特点与缺点、消弱错乱及背景图的功效,立即影响键入数据信息的品质,因为沒有通用性的照明灯具,光源的设计方案一直是机器视觉技术的难题,一般须对于每一特殊的运用案例来挑选光源种类,也要依据实际自然环境对光源安的裝、光源的直射方法开展掂量,以超过最好实际效果。
不一样种类的光源稳定性存有差别,普遍的光源有环形光、条形光、面光源、背光源、同轴光、碗光等。因此,光源的选择差异,也是影响视觉检测设备的不稳定因素。
视觉检测设备不稳定因素:机器视觉软件
机器视觉软件稳定性对机器视觉技术的影响不容置疑,视觉识别系统终究会在电子计算机上利用计算机选用有目的性的优化算法开展图像滤波,边缘检测和边沿获取等一系列图象处理,不一样的图象处理和解析方式及其不一样的检验方式与计算方法,都是产生不一样的偏差,优化算法好坏决策精确测量精度的高低,因此,需要选择合适的机器视觉软件,这样才可以避免视觉检测设备精度变低。
矩视智能机器视觉低代码平台是一个面向机器视觉应用的云端协同开发平台,始终秉承0成本、0代码、0门槛、0硬件的产品理念。
平台以人工智能技术为核心,在机器视觉应用开发环节,为开发者提供图像采集、图像标注、算法开发、算法封装和应用集成的一站式完整工具链。覆盖字符识别、缺陷检测、目标定位、尺寸测量、3D测量、视频开发等上百项通用功能。
零成本:无需购买,平台免费开发,用户无限制使用
零门槛:无需任何图像知识,只需标注操作即可完成视觉算法开发
零代码:无需编写代码,只需“拖拉拽”式操作,开发可本地化部署的应用程序
零硬件:无需搭建本地开发环境,浏览器登陆即可在线使用
03
提视觉检测精度的7种方法
选择合适的光源
如果没有合适的光源,即使是最好的相机也无法捕捉到清晰的图像。对于某些应用,背光可能会产生最佳效果。在其他情况下,您可能需要明场照明或低角度线性阵列。您的系统集成商可以帮助您做出正确的选择。
校准光源
一旦您知道哪种类型的光源最好,可能仍需要进一步校准。调整照明系统的频率和波长,以减少来自生产环境或您正在使用的零件和材料上可能存在的涂层的噪音。
过滤灯光
机器视觉在保持一致的环境中效果最佳。但这可能很难保证一整天。环境光、重新布置的生产线和不断变化的产品都会影响照明。镜头过滤器可以帮助消除不需要的光。
触发功能
在某些情况下,生产环境中的电噪声会导致检测系统误触发。这可能会导致分析失败并导致产品不应该出现故障。触发功能可以帮助您避免这种情况。
添加AI技术
人工智能和嵌入式系统正变得越来越容易被各种制造商使用,人工智能可以通过基于强大的数据集做出更智能的决策来减少面积。
改善零件定位
一些合格的元件由于定位不良而未能通过检查。添加更精确的工具来固定零件进行检查可以提高机器视觉检查的准确性。
增加稳定性
生产环境中的设备经常会受到噪音和振动的影响,从而导致图像模糊,这可能导致不必要的故障和重复检查。
编辑:黄飞
-
铁路建设新帮手——机器视觉检测系统2014-04-18 2837
-
机器视觉应用案例简析2015-11-18 5879
-
机器视觉表面缺陷检测技术2016-01-20 6568
-
机器视觉检测设备的优势2019-10-14 2764
-
机器视觉检测之产品缺陷检测,提高产品良品率2020-08-10 2394
-
机器视觉检测系统在薄膜表面缺陷检测的应用2020-10-30 2376
-
纱布瑕疵缺陷机器视觉检测的应用2021-03-25 2090
-
求大佬分享一种基于毫米波雷达和机器视觉的前方车辆检测方法2021-06-10 2244
-
中山视觉尺寸检测方法和检测范围2021-07-08 1126
-
四元数数控:深圳机器视觉检测有什么应用?2021-11-02 906
-
四元数数控:机器视觉检测产品有什么缺陷检测?2021-11-04 1096
-
基于机器视觉的LED芯片检测方法2017-02-07 980
-
使用机器视觉检测技术可提高检测系统的效率?2020-08-30 1385
-
机器视觉精度检测2023-06-29 1890
-
影响机器视觉检测设备精度有哪些?要如何提高机器视觉检测精度?2023-08-04 2152
全部0条评论

快来发表一下你的评论吧 !
