

RT-Thread qemu mps2-an385 bsp移植制作 :BSP制作篇
电子说
描述
下载 V2M-MPS2_CMx_BSP
mps2 的资料很少,所以唯一能下载的是 ARM 官方的 V2M-MPS2_CMx_BSP
提取启动文件与连接脚本
安装 Keil.V2M-MPS2_CMx_BSP.1.8.0.pack 后, 在 V2M-MPS2_CMx_BSP1.8.0DeviceCMSDK_CM3SourceGCC 路径下,有 mps2-an385 的启动文件与连接脚本
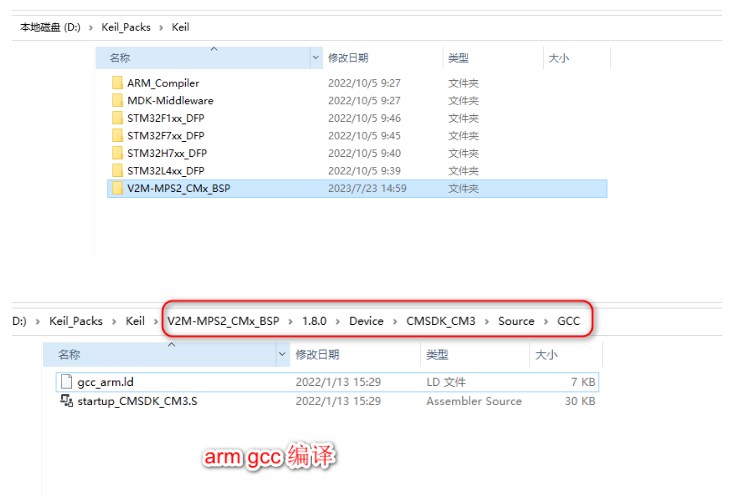
把 V2M-MPS2_CMx_BSP1.8.0DeviceCMSDK_CM3SourceGCCgcc_arm.ld 复制到工程 qemu-mps2-arm 目录下,可以改为 link.lds。
把 V2M-MPS2_CMx_BSP1.8.0DeviceCMSDK_CM3SourceGCCstartup_CMSDK_CM3.S 复制到工程 qemu-mps2-arm/drivers 目录下
【备注】也可把整个 V2M-MPS2_CMx_BSP1.8.0DeviceCMSDK_CM3 目录复制到工程 qemu-mps2-arm/drivers 目录下
通过简单了解到,这个启动文件与连接脚本,与 STM32F103 系列的很像。
scons 构建环境的搭建
RT-Thread BSP 使用 scons 进行构建,所以需要 SConscript SConstruct 两个文件,另外需要 rtconfig.py 文件,这几个文件可以从其他的 RT-Thread bsp 如 bspstm32stm32f103-fire-arbitrary 复制过来,修改一下构建路径即可
SConscript 文件 无需修改,内容如下,遍历 当前与子目录下的 SConscript,获取构建的目标
RT-Thread building script for bridge
import os
from building import *
cwd = GetCurrentDir()
objs = []
list = os.listdir(cwd)
for d in list:
path = os.path.join(cwd, d)
if os.path.isfile(os.path.join(path, 'SConscript')):
objs = objs + SConscript(os.path.join(d, 'SConscript'))
Return('objs')
SConstruct 文件:只需要修改 RTT_ROOT 的路径
import os
import sys
import rtconfig
if os.getenv('RTT_ROOT'):
RTT_ROOT = os.getenv('RTT_ROOT')
else:
RTT_ROOT = os.path.join(os.getcwd(), '..', 'rt-thread')
print(RTT_ROOT)
sys.path = sys.path + [os.path.join(RTT_ROOT, 'tools')]
from building import *
TARGET = 'rtthread.' + rtconfig.TARGET_EXT
DefaultEnvironment(tools=[])
env = Environment(tools = ['mingw'],
AS = rtconfig.AS, ASFLAGS = rtconfig.AFLAGS,
CC = rtconfig.CC, CFLAGS = rtconfig.CFLAGS,
CXX = rtconfig.CXX, CXXFLAGS = rtconfig.CXXFLAGS,
AR = rtconfig.AR, ARFLAGS = '-rc',
LINK = rtconfig.LINK, LINKFLAGS = rtconfig.LFLAGS)
env.PrependENVPath('PATH', rtconfig.EXEC_PATH)
env['ASCOM'] = env['ASPPCOM']
Export('RTT_ROOT')
Export('rtconfig')
prepare building environment
objs = PrepareBuilding(env, RTT_ROOT)
make a building
DoBuilding(TARGET, objs)
rtconfig.py 文件: 基本不需要修改,注意复制一份 STM32F103 系列 Cortex-M3 的,如 bspstm32stm32f103-fire-arbitraryrtconfig.py
图形配置文件
RT-Thread 在 ubuntu 下使用 scons --menuconfig 进行图形界面配置,需要相应的 Kconfig 文件,当前需要两个 Kconfig 文件,BSP 下 Kconfig 与
bsp/drivers 下的 Kconfig,如 从 bspstm32stm32f103-fire-arbitrary 复制一份,修改一下
qemu-mps2-arm/Kconfig 内容,注意修改 RTT_DIR 路径
mainmenu "RT-Thread Project Configuration"
config BSP_DIR
string
option env="BSP_ROOT"
default "."
config RTT_DIR
string
option env="RTT_ROOT"
default "../rt-thread"
config PKGS_DIR
string
option env="PKGS_ROOT"
default "packages"
source "$RTT_DIR/Kconfig"
source "$PKGS_DIR/Kconfig"
source "$BSP_DIR/drivers/Kconfig"
qemu-mps2-arm/drivers/Kconfig
这里需要配置一下 MCU 的信息,如 select ARCH_ARM_CORTEX_M3,用于选择 RT-Thread 的 rt-thread/libcpu/arm/cortex-m3/
mps2-an385 的串口是 uart0 开始的,配置一个用于 MSH shell 的串口,当前验证是 uart0 可以正常工作
menu "Hardware Drivers Config"
config SOC_MPS2_CORTEX_M3
bool
select ARCH_ARM_CORTEX_M3
select RT_USING_COMPONENTS_INIT
select RT_USING_USER_MAIN
default y
menu "Onboard Peripheral Drivers"
config BSP_USING_UART0
bool "Enable UART0"
default y
config BSP_USING_UART1
bool "Enable UART1"
default n
endmenu
endmenu
默认需要有一个 rtconfig.h,这个文件可以手动创建,内容为空即可,然后通过 scons --menuconfig,即可刷新 rtconfig.h 的内容,同时生成 .config 默认配置文件
mps2-an385 相关的文件
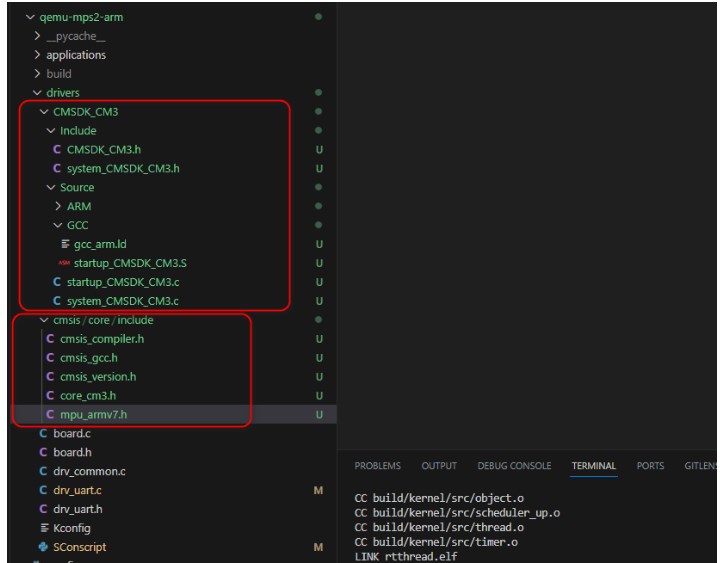
当前 把 KeilV2M-MPS2_CMx_BSP1.8.0DeviceCMSDK_CM3 复制到 工程 qemu-mps2-arm/drivers/ 目录下,
创建并修改 qemu-mps2-arm/drivers/SConscript,用于编译 qemu-mps2-arm/drivers 驱动相关的文件
import rtconfig
from building import *
cwd = GetCurrentDir()
src = Glob('*.c')
src = Split('''
CMSDK_CM3/Source/system_CMSDK_CM3.c
board.c
drv_common.c
drv_uart.c
''')
list = os.listdir(cwd)
CPPPATH = [cwd]
CPPPATH += [cwd + '/CMSDK_CM3/Include']
CPPPATH += [cwd + '/cmsis/core/include']
objs = []
if rtconfig.PLATFORM in ['gcc']:
src += ['CMSDK_CM3/Source/GCC/startup_CMSDK_CM3.S']
group = DefineGroup('Drivers', src, depend = [''], CPPPATH = CPPPATH)
for d in list:
path = os.path.join(cwd, d)
if os.path.isfile(os.path.join(path, 'SConscript')):
objs = objs + SConscript(os.path.join(d, 'SConscript'))
objs = objs + group
Return('objs')
从其他 bsp,复制一份 board.c board.h 文件 到 qemu-mps2-arm/drivers,board 初始化
从其他 bsp,复制一份 drv_uart.c drv_uart.h 文件 到 qemu-mps2-arm/drivers,串口驱动
从其他 bsp,复制一份 drv_common.c 到 qemu-mps2-arm/drivers,当前主要是 定时器初始化
编译并解决编译错误
scons 构建 drivers/system_CMSDK_CM3.c354: error: #error device not specified!,可以在
qemu-mps2-arm/drivers/CMSDK_CM3/Source/system_CMSDK_CM3.c 文件上面定义 MCU 的型号 #define CMSDK_CM3
scons 构建 缺少 core_cm3.h 文件: 这部分可以复制 Keil MDK5 pack 路径下的 ARMCMSIS5.8.0CMSISCoreIncludecore_cm3.h 下
工程里面创建 qemu-mps2-arm/drivers/cmsis/core/include 目录,把以下文件复制过来
ARMCMSIS5.8.0CMSISCoreIncludecmsis_compiler.h
ARMCMSIS5.8.0CMSISCoreIncludecmsis_gcc.h
ARMCMSIS5.8.0CMSISCoreIncludecmsis_version.h
ARMCMSIS5.8.0CMSISCoreIncludecore_cm3.h
ARMCMSIS5.8.0CMSISCoreIncludempu_armv7.h
待进一步完善驱动、配置、修改并启动 RT-Thread
小结
本篇主要是 RT-Thread qemu mps2-an385 bsp 相关文件的准备工作,了解构建过程,并为进一步 适配启动 RT-Thread 做准备
本篇的 qemu board mps2-an385 资料比较少,主要是通过 ARM 官方 Keil.V2M-MPS2_CMx_BSP.1.8.0.pack 获取到,并且文档也比较少,
不过 RT-Thread 移植主要是 定时器与 串口的移植, CPU 架构部分,RT-Thread libcpu 已经支持 ARM Cortex-M3,所以移植起来主要是 BSP 相关的适配与修改
接下来开始 适配与修改BSP,让 mps2-an385 RT-Thread 跑起来.
-
RT-Thread qemu mps2-an385 bsp移植制作 :系统运行篇2023-11-14 1844
-
瑞萨Cortex-M内核RA MCU的RT-Thread BSP制作教程发布2023-09-18 1928
-
RT-Thread qemu mps2-an385 bsp移植制作 :环境搭建篇2023-08-02 1891
-
RT-Thread BSP qemu-virt64-aarch64文件系统2023-05-16 1138
-
RT-Thread文档_Nordic BSP 上手指南2023-02-22 980
-
如何在Window及Ubuntu平台使用QEMU运行 RT-Thread qemu-vexpress-a9 BSP工程2022-10-26 2896
-
【御芯微WIoTa®自组网协议开发套件试用体验】rt-thread bsp软件包制作2022-07-15 7950
-
GD32 RISC-V系列 BSP框架制作与移植2022-06-22 7965
-
Cortex-M内核MCU的RT-Thread BSP框架和制作教程分享2022-06-14 2981
-
如何进行GD32F103系列的BSP制作2022-05-12 5116
-
STM32系列BSP制作教程简介2021-08-24 2153
-
RT-Thread的STM32BSP制作教程2021-08-03 2703
-
STM32系列RT-Thread系统BSP制作教程免费下载2019-02-25 1862
-
如何在windows和linux平台使用RT-Thread QEMU BSP,并运行RT-ThreadGUI示例2018-02-08 16043
全部0条评论

快来发表一下你的评论吧 !
