

“万物”皆可盘?机械手竟然也学会了!
描述
此前,特斯拉宣布研究制作专业级别的人形机器人,这一举动引起了广泛关注,让人形机器人赛道热度暴涨。国内外众多企业也纷纷跟进,接连推出自己的人形机器人产品。
然而,当前市场上很多的人形机器人的手部设计和功能都存在一定的缺陷。
比如,小米推出的“铁大”人形机器人,其手部像带了一幅鲨鱼手套,完全没有手指设计,只能进行开合夹取动作。
与之类似,傅利叶智能近日发布的GR-1通用人形机器人手部也是两片式夹爪式设计。
即便是很早就开始人形机器人研究的波士顿动力,其Atlas的手部设计也是直接用一个与肘部相似的黑色半球状连接,后面虽然进行了改进但也仅仅是换了一个夹爪。
特斯拉的人形机器人“擎天柱”虽然对此进行了更为精细化的改进,能完成一些相对更为精细的操作,但在敏捷性方面仍然有待进步。
近日,由香港科技大学和加州大学圣地亚哥分校的几位学者(陈启峰1 , 尹兆恒1+ , 王小龙2, 秦宇哲2 , 黄丙浩2+ , )联合发表在《arxiv》上的研究成果或许能为人形机器人手部灵活性的提升带来一些帮助。
据悉,陈启峰团队推出了一种新系统Touch Dexterity,可以仅通过触觉来执行手中的对象旋转,且不受视觉传感限制,为多指机器人提供更加灵敏的触觉感知。
▍人手?机械手?灵活性主要依靠啥?
通过上面的视频,我们可以看到多指机械手不仅能够围绕不同轴旋转现实世界的物体,还能在黑暗环境中进行手动操作。
这其中的关键便在于陈启峰团队推出的新触觉感知系统Touch Dexterity。
盲人摸象的故事想必大家都听过,触觉信息虽不能反映全部情况,但它揭示了可能无法直接从视觉推断出的有用联系信息,在人类的灵活性中起着至关重要的作用。
人类可以在不使用视觉的情况下进行手动灵巧操作,那么机械手是否能具有同样的能力?在此动机的推动下,陈启峰团队首先对触摸信息的帮助进行了深度了解。
为了了解触摸信息有何帮助,陈启峰团队从形状理解的角度进行了一项研究。在训练神经网络通过旋转卷展来预测对象的形状后,团队使用它通过旋转卷展来预测新物体的形状。
团队进而发现,只有触摸信息出现在卷展栏中,才能准确地重建对象的形状。
因此团队决定尝试赋予机械手触摸能力以实现机械手的敏捷灵活性。
▍灵巧操纵系统Touch Dexterity
在经过多次试验后,陈启峰团队推出了触觉感知系统Touch Dexterity,实现了多指机械手仅适用触摸即可进行手动旋转,即便在系统看不见的情况下,多指机械手也依然能够围绕不同的轴旋转各种现实世界的物体。
据了解,触觉感知系统Touch Dexterity由Allegro 机械手和 16 个低成本力敏电阻 (FSR) 传感器的硬件组成。触摸感应阵列可以提供关键手部物体接触的反馈,并帮助手理解形状,确保复杂的手部物体操作的成功。
具体来看,陈启峰团队弃用了传统依赖小区域内的精确触觉传感的设计,提出了一种新的灵巧操纵系统设计——使用覆盖整个机器人手(手掌、手指链接、指尖)一侧的密集二元力传感器(触摸或无触摸)。
这不仅设计成本低廉,可以提供更大的对象覆盖范围,同时最小化 Sim2Real 间隙。
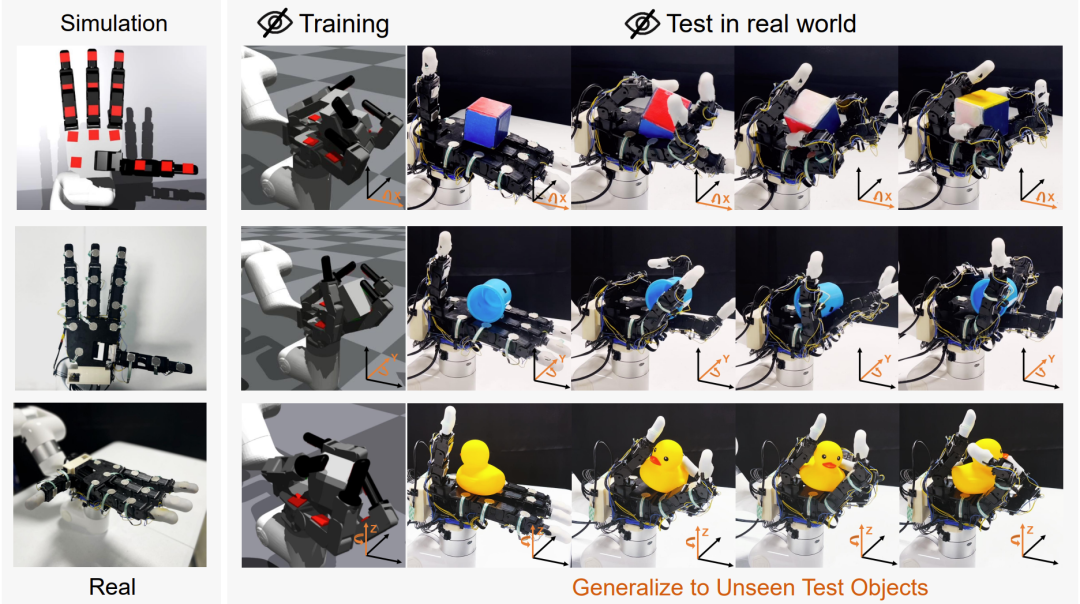
在学习流程方面,陈启峰团队通过强化学习训练控制策略来旋转模拟中的多个对象。多指机械手学习到的策略可以直接转移到现实中并泛化到看不见的新物体。
由于系统不依赖于视觉,这为灵巧操纵系统在难以获得可靠视觉输入的复杂现实场景中的应用提供了巨大优势。
值得一提的是,结合各种学习的对象旋转原语,Touch Dexterity还提供了方便人类共享的控制界面,擦左元可以使用键盘控制系统重新定向对象。
▍结语
Touch Dexterity系统对于机械手敏捷灵活性的提升效果显而易见,特斯拉擎天柱手部做了11个精细的自由度的设计显然是想要充分发挥人形机器人手部的作用。可以让擎天柱在黑灯工厂中摸黑干活的Touch Dexterity,马斯克看了都要心动吧!
-
机械手 OEM 的应用2024-09-18 834
-
机械手驱动系统设计要点2012-09-10 3474
-
使用桁架式机械手有哪些优势?2020-11-25 1644
-
与机械手通信,首先暂停机械手,后续继续运行机械手程序后,labview接收不到指令2021-06-21 7010
-
湖北视觉分拣机械手系统在手机盖板的应用2021-08-11 1192
-
PLC控制机械手设计2008-12-13 2815
-
机械手的顺序控制系统的设计2010-07-08 1178
-
PLC在机械手步进控制中的应用2009-06-19 2247
-
基于PLC的机械手混合驱动控制2011-08-15 1183
-
基于PLC的机械手控制设计(毕业设计)2015-11-13 2385
-
东芝机械手操作2017-10-20 3236
-
机械手图册——机械手设计必看2018-02-01 2425
-
万物皆可插充电线的时代,电池也发生了大变化2020-04-16 2975
-
坐标机械手配件有哪些?2023-12-07 1550
-
机器视觉控制机械手的具体过程2024-07-04 1744
全部0条评论

快来发表一下你的评论吧 !
