

基于RT-Thread+RA6M4的无刷电机伺服控制器设计
工业控制
1288人已加入
描述
应用背景
本项目制作了一个基于RT-Thread+RA6M4的无刷电机控制器,可以实现是无刷电机的伺服控制。可以应用在小型CNC、人机交互等场景。
实现功能
基于力矩控制、速度控制和位置控制实现了一下功能:
·模拟挡位开关
·模拟惯性滚轮
·模拟段落感滚轮
·模拟力反馈推杆
系统框架
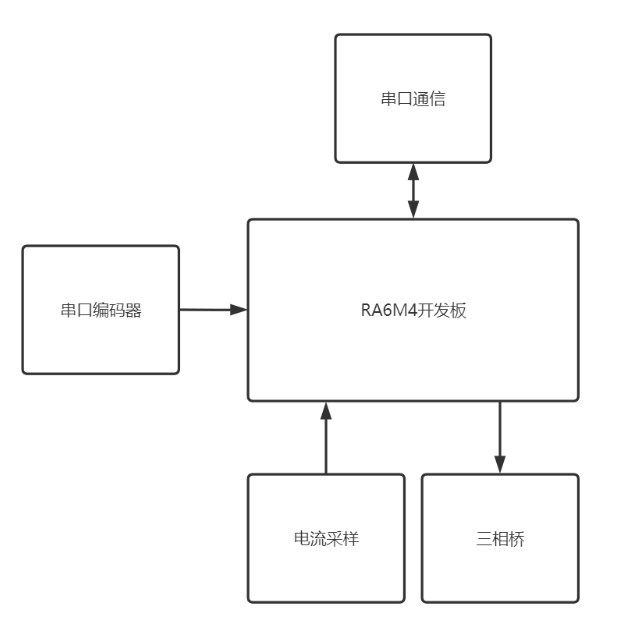
硬件框架
硬件使用的RA6M4作为主控制器,三相全桥逆变电路和V、W两相低端电流采样。
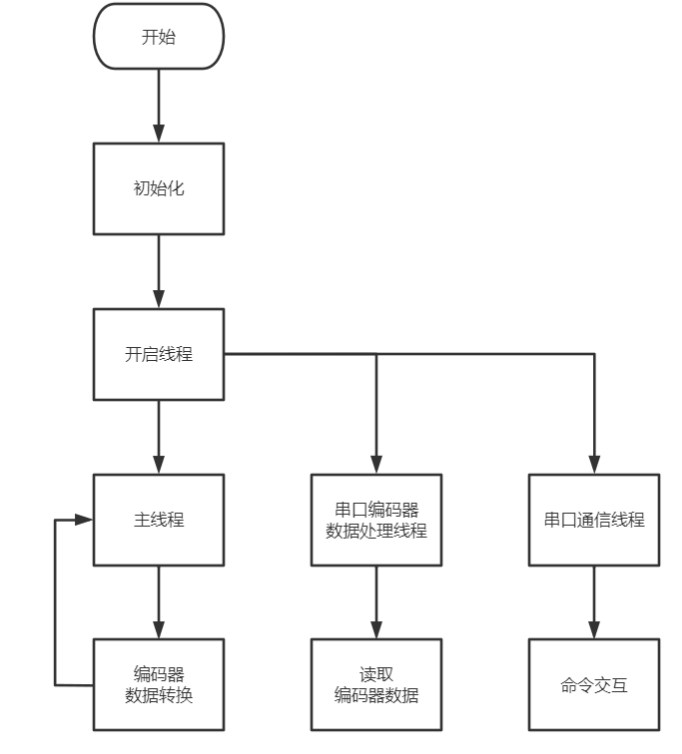
软件框架
软件上使用了四路ADC、三路PWM、两路uart,并使用了三个线程。
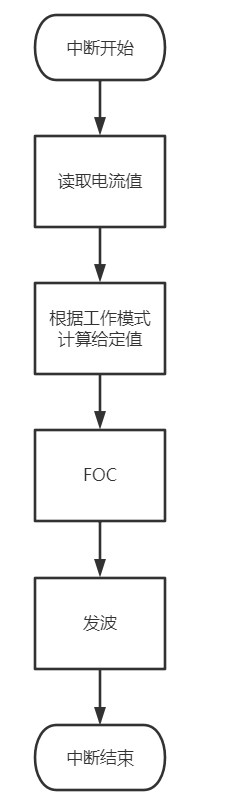
PWM使用的是普通的互补PWM手动对齐中心,这样方便后面拓展为两路电机控制。
中断主要执行的是实时性比较高的代码,主要是电机控制相关的代码。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于RT-Thread+RA6M4的5寸屏电脑状态实时显示设计案例2022-11-17 1141
-
基于RT-Thread+RA6M4的智能网关设计案例相关资料推荐2022-11-16 1132
-
基于RT-Thread+RA6M4的无人机尝试方案分享2022-11-07 2123
-
基于RT-Thread+RA6M4上传onenet云平台的设计实现2022-09-23 2551
-
基于RT-Thread+RA6M4的usb游戏摇杆设计相关资料推荐2022-08-18 2300
-
基于RT-Thread+RA6M4的时钟设计方案2022-08-16 1992
-
基于RT-Thread+RA6M4的无人机设计方案2022-08-09 1627
-
基于RT-Thread+RA6M4的智能鱼缸系统设计方案推荐2022-08-04 2466
-
基于RT-Thread+RA6M4的桌面资源监控器设计资料推荐2022-08-02 2288
-
基于RT-Thread+RA6M4的无刷电机控制器设计资料分享2022-08-01 3438
-
基于RT-Thread+RA6M4的CAN通信终端显示器设计方案2022-07-28 2375
-
基于RT-Thread+RA6M4上传onenet云平台的设计资料分享2022-07-25 1773
-
基于RT-Thread+RA6M4的远程环境采集设计方案2022-07-20 2162
-
基于RT-Thread+RA6M4的虚拟仪器开发环境搭建2022-07-08 3404
全部0条评论

快来发表一下你的评论吧 !
