

全国产EtherCAT运动控制边缘控制器(一):ZMC432H硬件接口
电子说
描述
为了方便用户了解ZMC432H,本节课程主要给大家介绍一下全国产EtherCAT运动控制边缘控制器ZMC432H的硬件接口与功能。
一、功能简介
全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程显示功能,能提供网络组态显示,可实时监控和调整参数配置。
ZMC432H具备丰富的硬件接口和控制功能模块,能实现高效稳定的运动控制和实时数据采集,以满足工业控制协同工业互联网的应用需求。
ZMC432H内置了Linux系统,可以使用本地的LOCAL接口进行连接,可以做到更快速的指令交互,单条指令与多条指令一次性交互时间为40us左右。
二、硬件参数说明
控制器的基本参数说明如下表:
| 型号 | ZMC432H |
| 基本轴数 | 32 |
| 最多扩展轴数 | 32 |
| 基本轴类型 | EtherCAT,6个本地脉冲轴 |
| 数字IO数 | 24路输入,12路输出,每个脉冲轴有2路输入和2路输出 |
| 最多扩展IO数 | 4096路输入,4096路输出 |
| PWM 数 | 4 |
| AD/DA | 通用AD、DA有2路,0-10V |
| 最多扩展 AD/DA | 1000路AD,1000路DA |
| 脉冲位数 | 64 |
| 编码器位数 | 64 |
| 速度加速度位数 | 64 |
| 脉冲最高频率 | 10MHz |
| 每轴运动缓冲数 | 4096 |
| 数组空间 | 320000 |
| 程序空间 | 32MByte |
| Flash 空间 | 256MByte |
| 电源输入 | 24V直流输入 |
| 通讯接口 | RS232,RS485,以太网,U 盘,CAN,EtherCAT |
| 外形尺寸 | 205mm*135.25mm |
用户可以使用RTSys(ZDevelop)软件连接控制器,在RTSys(ZDevelop)软件的在线命令栏发送“?*max”打印查看更多控制器规格参数,“?*set”查看打印指令参数值。“?*port”打印查看端口信息。
>>?*max
max_axis:32
max_motor:32
max_movebuff:4096
max_in:36,4096
max_out:24,4096
max_ain:2,520
max_aout:2,520
max_pwm:4
max_slot:1
max_slotecat:1,128
max_comport:2
max_ethport:6
max_ethcustom:4
max_ethiport:1
max_flashnum:9999
max_flashsize:20480
max_nand:3274367KB
max_nandremain:2779199KB
max_hwout:4,32
max_pswitch:64
max_file:61
max_3file:2
max_task:22
max_timer:1024
max_loopnest:8
max_callstack:8
max_local of one sub:20
max_vr:8000
max_table:320000
max_modbusbit:8000
max_modbusreg:8000
max_var:4096
max_array:2048
max_arrayspace:1280000
max_sub:2048
max_edgescan:1024
max_lablelength:25
max_hmi:2,x:1920 y:1080
SERVO_PERIOD:1000 min:500 max:4000
function support:Coder Cam MultiMove Circ Merge Frame Robot NcGcode
>>?*port
Port:0-COM.
Port:1-COM.
Port:2-ETH.
Port:3-ETH.
Port:4-ETH.
Port:5-ETH.
Port:6-ETH.
Port:7-ETH.
Port:8-LOCAL.
Port:9-LOCAL.
Port:10-ECUSTOM.
Port:11-ECUSTOM.
Port:12-ECUSTOM.
Port:13-ECUSTOM.
Port:14-LOCAL.
Port:20-ICONNECT.
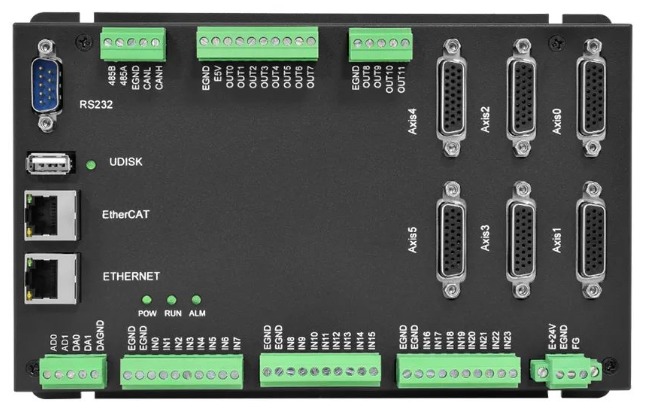
三、控制器接口简介
控制器的接口丰富,下图为ZMC432H的接口简介:
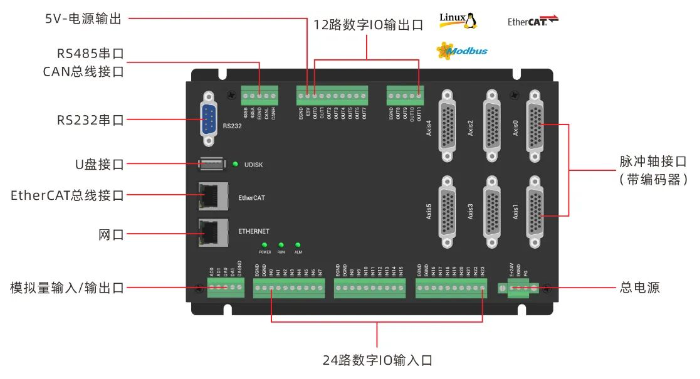
接口说明如下表:
| 标识 | 描述 | 个数 | 说明 |
| POW | 状态指示灯 | 1个 | 电源指示灯:电源接通时亮灯 |
| RUN | 1个 | 运行指示灯:正常运行时亮灯 | |
| ALM | 1个 | 错误指示灯:运行错误时亮灯 | |
| RS232 | RS232串口(port0) | 1个 | 采用MODBUS_RTU协议 |
| RS485 | RS485串口(port1) | 1个 | 采用MODBUS_RTU协议 |
| EtherCAT | EtherCAT总线接口 | 1个 | EtherCAT总线接口,接EtherCAT总线驱动器和EtherCAT总线扩展模块 |
| ETHERNET | 网口 | 1个 | 采用MODBUS_TCP协议,通过交换机扩展网口个数,?*port 查询网口通道数,默认IP地址192.168.0.11 |
| UDISK | U盘接口 | 1个 | 插入U盘设备 |
| E+24V | 主电源 | 1个 | 24V直流电源给控制器供电(建议功率不要小于20W) |
| E5V | E5V电源输出 | 1个 | 用于PWM或者单端轴共阳极接线使用 |
| CAN | CAN总线接口 | 1个 | 连接CAN扩展模块和其他标准CAN设备 |
| IN | 数字IO输入口 | 24个 | NPN型,内部24V供电,4路高速输入,IN0-3可配置为锁存功能 |
| OUT | 数字IO输出口 | 12个 | NPN漏型,内部24V供电,4路高速输出,OUT0-3可配置为PWM和硬件比较输出功能 |
| AD | 模拟量输入口 | 2个 | 分辨率12位,0-10V |
| DA | 模拟量输出口 | 2个 | 分辨率12位,0-10V |
| AXIS | 脉冲轴接口 | 6个 | 包含差分脉冲输出和差分编码器输入 |
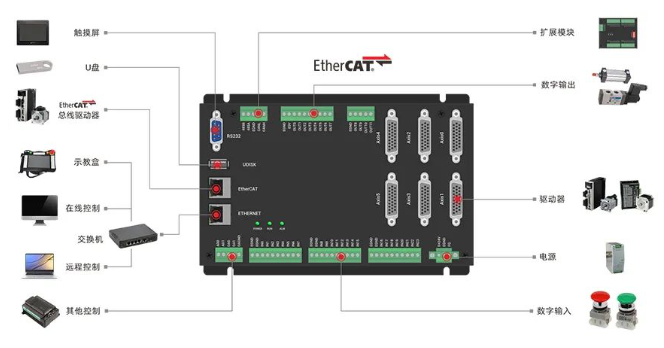
PC可通过串口和网口连接到控制器,下发指令给控制器处理。通过RS232、RS485和网口可与外部设备通讯。连接扩展的IO模块可使用EtherCAT或CAN总线接口。
运动控制的参考架构如下图:
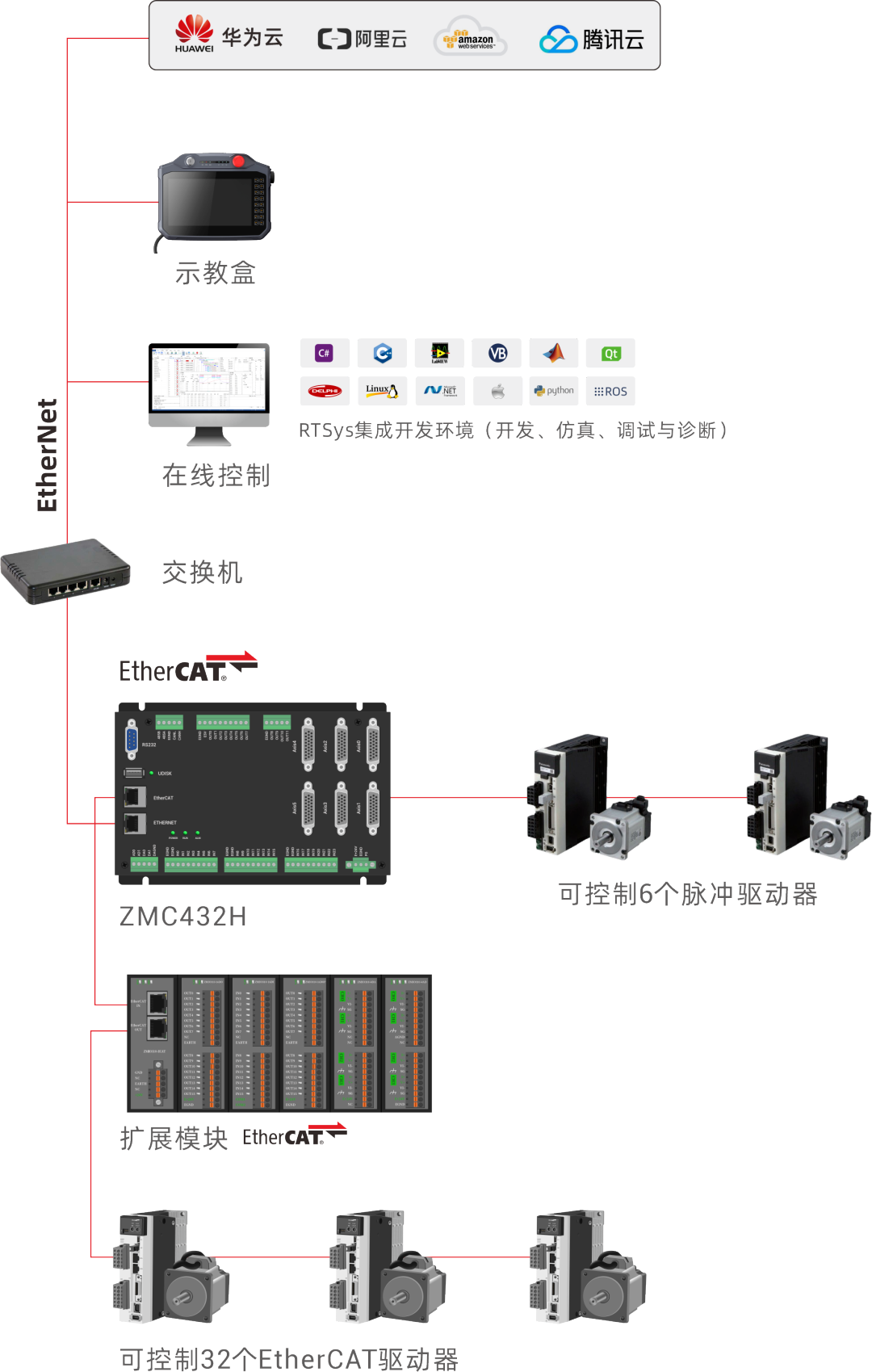
四、ZMC432H一站式解决方案
ZMC432H为智能制造的工业互联网用户提供一站式解决方案,实现生产设备之间的互联互通,全面共享和交互内部数据,从而优化生产流程,更好地应对市场需求的变化。
方案涵盖通用的运动控制引擎和实时内核MotionRT,用户可通过PC端的IDE编程环境RTSys,在单个硬件平台上实现应用程序的可移植性和集中控制,从而降低成本,提高系统可靠性和安全性。
(1)32轴EtherCAT总线控制,刷新周期1ms;
(2)6路10MHz高速差分脉冲输出,总线轴、脉冲轴可混合插补;
(3)控制器自带I/0,模拟量输入和输出;
(4)RS485/RS232可接仪表、传感器等;
(5)EtherNET网口对接MES、云平台;
(6)可配置Linux系统,实现工艺开发的差异化;
(7)硬件核心器件全国产,运动控制核心runtime软件MotionRT正运动技术自主自研,PC端IDE RTSys正运动技术自主自研持续改进。
RTSys是正运动技术推出的一款集成机器视觉+运动控制功能的开发软件,全国产自主工业软件IDE开发环境。支持RTBasic、RTPLC梯形图、 RTHMI组态和机器视觉RTVision等二次开发,并可混合编程,实时仿真、在线跟踪以及诊断与调试,快速帮助客户与用户实现智能装备的视觉定位、测量、识别、检测和复杂的运动控制等系统的开发。
下图为ZMC432H一站式解决方案示例图:
五、应用场景
全国产EtherCAT运动控制边缘控制器-ZMC432H适用于机器人、电子半导体设备、点胶设备、非标设备、印刷包装设备、锂电新能源设备、医疗设备、流水线等场合应用。
本次,正运动技术全国产EtherCAT运动控制边缘控制器(一):ZMC432H硬件接口,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑 黄宇
-
100%器件全国产化认证:ZMC432HG系列EtherCAT运动控制器通过全国产化认证!2025-05-27 1065
-
全国产EtherCAT运动控制边缘控制器ZMC432H如何使用Python+QT实现连续轨迹加工2023-11-06 2261
-
全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+Qt开发2023-11-02 1866
-
全国产EtherCAT运动控制边缘控制器(五):IO配置与回零运动的Python+Qt开发2023-10-22 2353
-
EtherCAT运动控制边缘控制器ZMC432H的轴参数配置和单轴运动控制2023-10-16 2564
-
EtherCAT运动控制:RTSys对控制器的监控与设置原理2023-10-15 2265
-
全国产EtherCAT运动控制边缘控制器(四):轴参数配置与单轴运动PC上位机C++控制2023-09-27 2391
-
EtherCAT运动控制边缘控制器功能简介和自定义API封装例程2023-08-28 7655
-
全国产EtherCAT运动控制边缘控制器ZMC432H接口介绍正运动技术 2023-08-18
-
全国产EtherCAT运动控制边缘控制器ZMC432H# 运动控制器# 运动控制卡# 正运动技术正运动技术 2023-08-07
-
EtherCAT运动控制边缘控制器ZMC432H接口与功能解析2023-08-05 2087
-
全国产EtherCAT运动控制边缘控制器-ZMC432H2023-07-25 1570
-
【正运动】全国产EtherCAT运动控制器 | ZMC432H2023-06-01 5159
-
脉冲+总线运动控制器ZMC432H用户手册2023-05-31 732
全部0条评论

快来发表一下你的评论吧 !
