

基于Aurix TC377的BLDC驱动系统设计
电子说
1.4w人已加入
描述
本文图片摘自“英飞凌与乾勤科技针对AURIX及BLDC控制的培训”
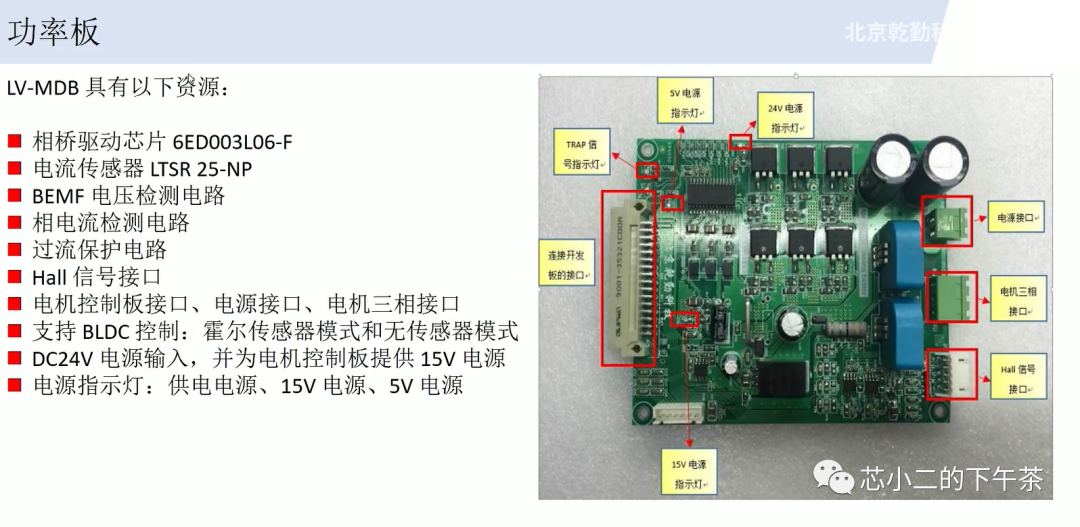
控制系统如下,控制器部分采用AURIX的TC3系列的TC377,采用专门驱动6ED003L06-F2,电流传感器采用LTSR 25-NP,本文介绍的控制系统,位置反馈采用了霍尔传感器;
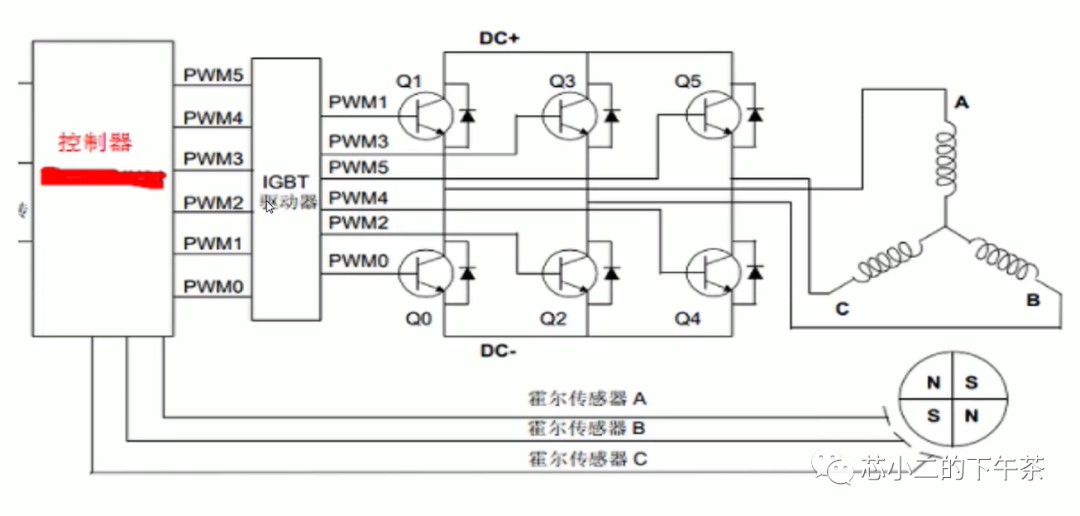
1控制原理概述
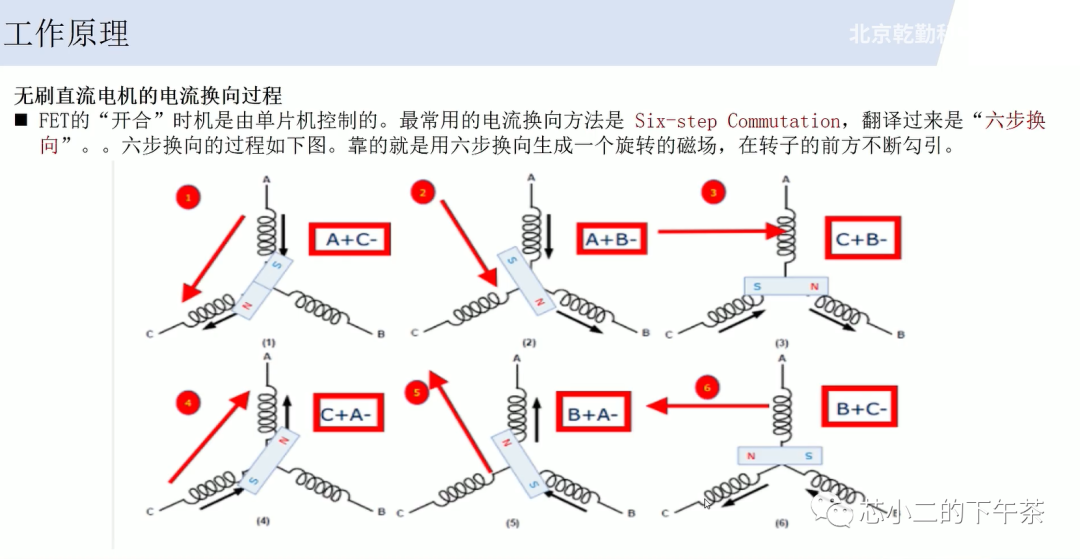
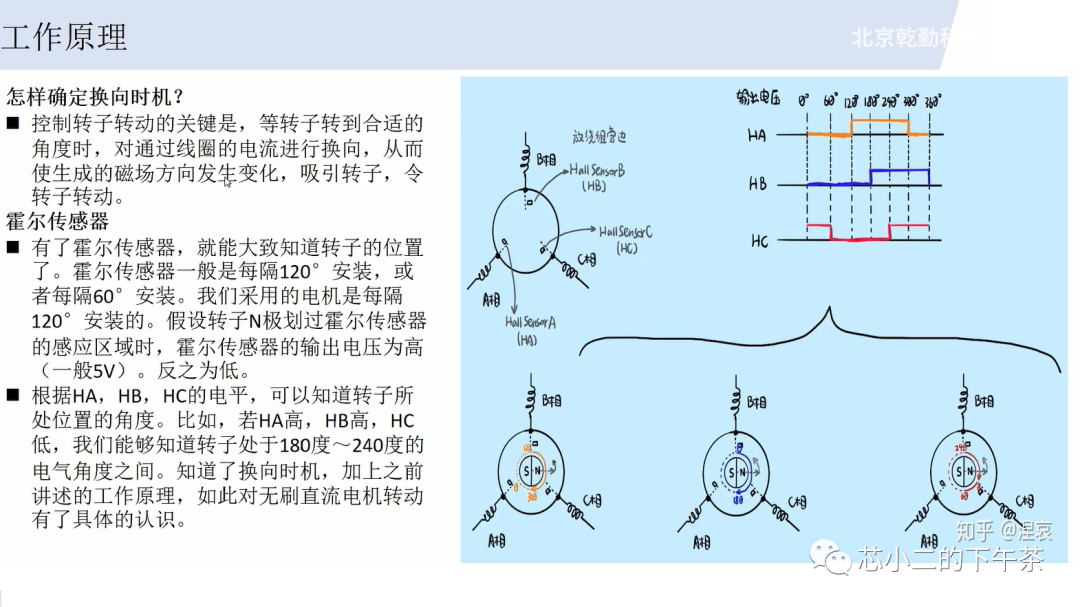
简单说下控制原理,详细的可以查下BLDC的六步换向控制; 通过控制三个桥臂的开关,进而控制BLDC三相绕组流过的电流,进而控制电流产生的磁场极性;磁体转子在磁场的作用下进行旋转; 为了检测出转子的位置,进而制定三个桥臂开关管的控制策略,需要采用霍尔传感器进行检测;
2基于AURIX的控制实现
如下图,几个主要部分:
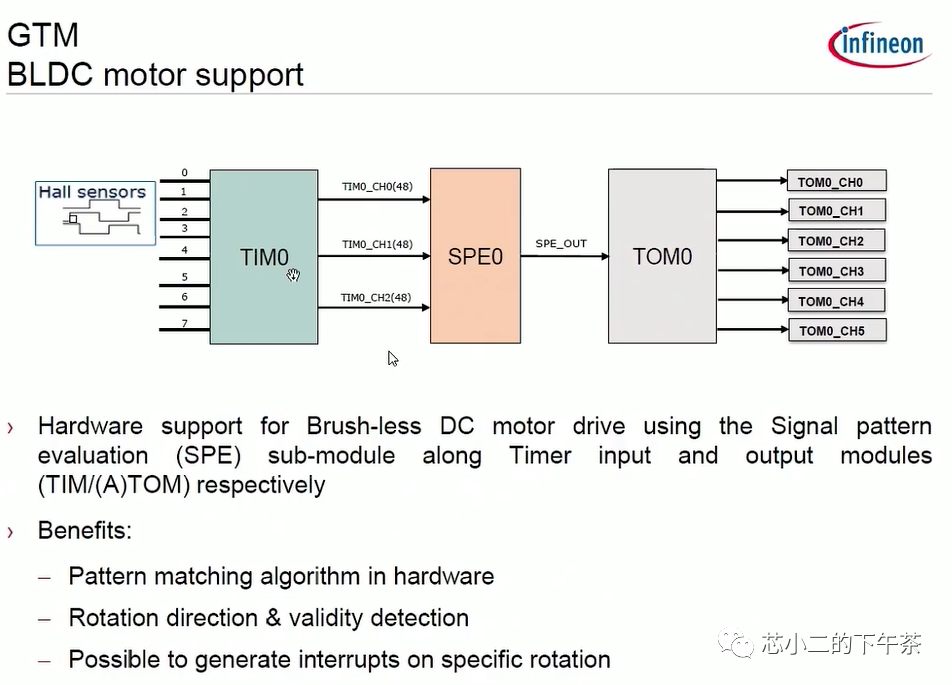
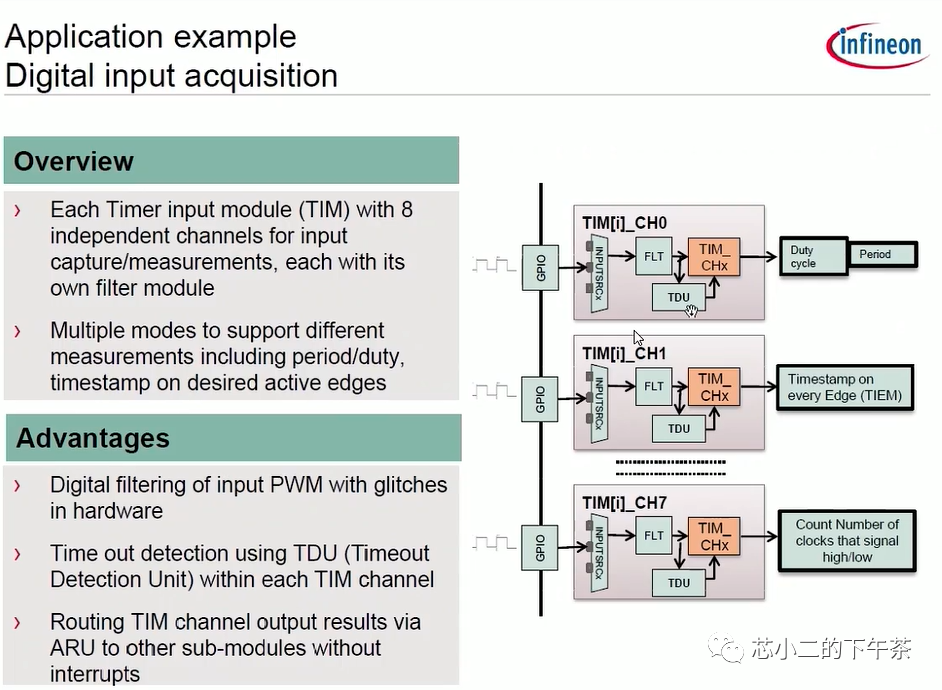
GTM-TIM模块,负责霍尔的输入检测及滤波;
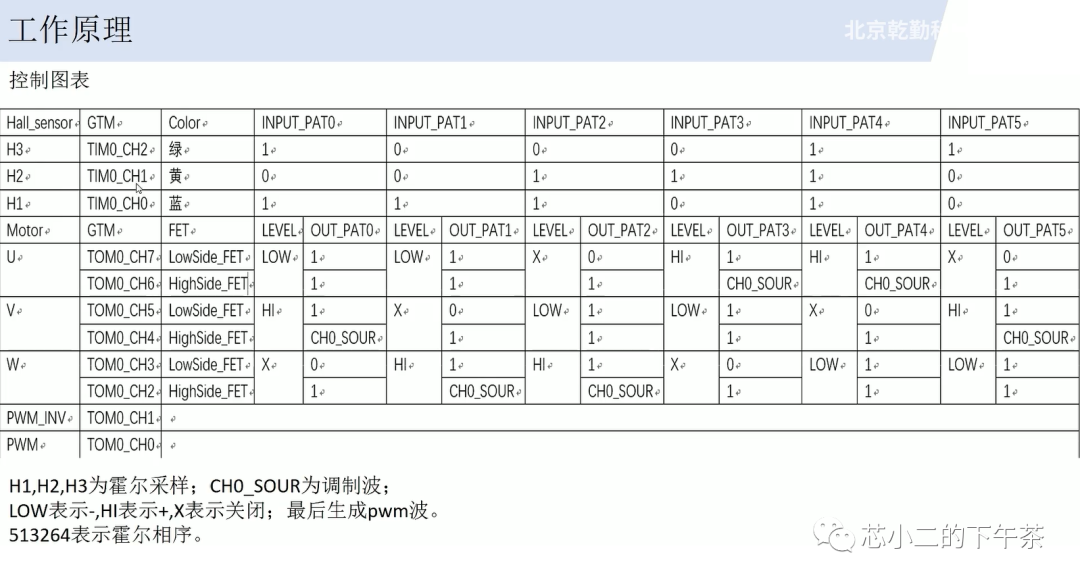
GTM-SPE模块,负责处理霍尔信号并确认下一步桥臂的控制策略;
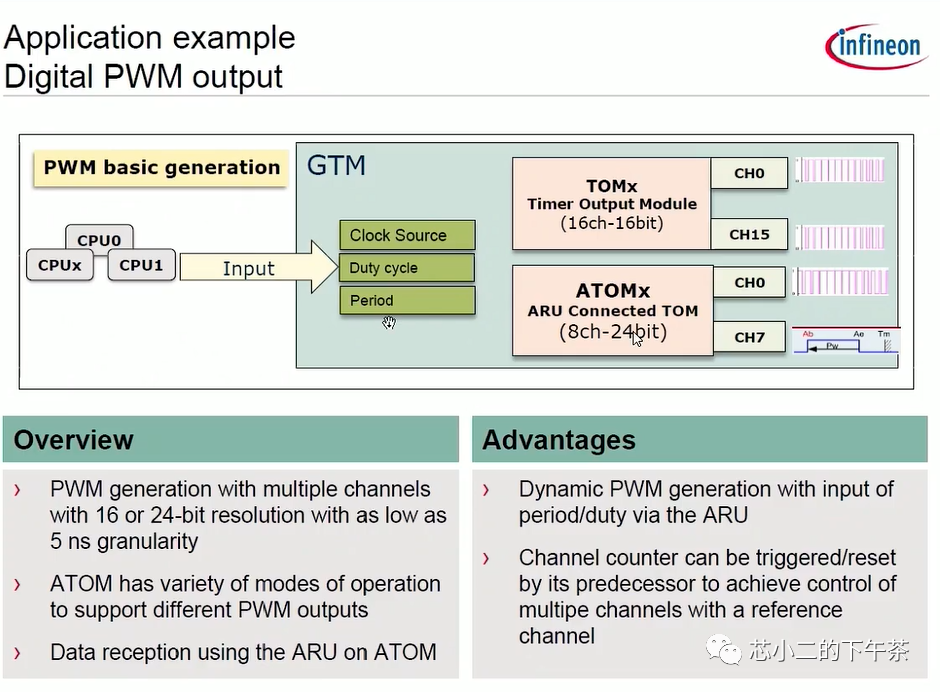
GTM-TOM模块,负责产生PWM;
GTM-DTM模块,负责PWM死区的产生;
整体的BLDC的控制软件流程图如下

3GTM相关模块介绍
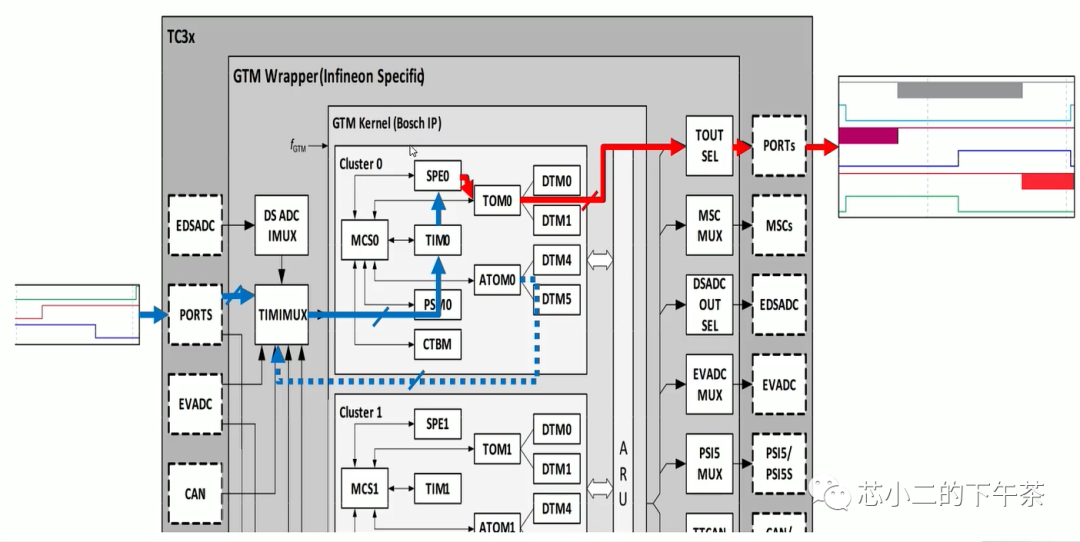
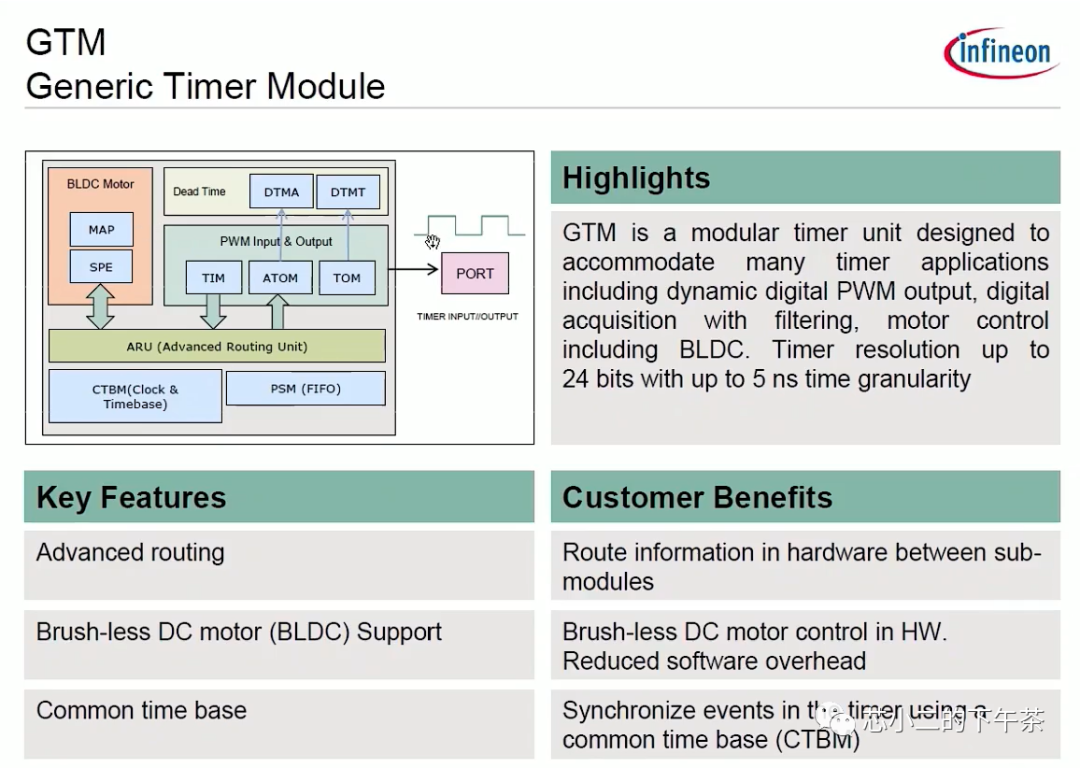
GTM名义上虽是定时器,但是其实际功能及性能已经超越了定时器,内部包括SPE及MCS等为控制定义的小核;不同GTM版本支持的PWM分辨率不一样,最高精度应该在5ns;
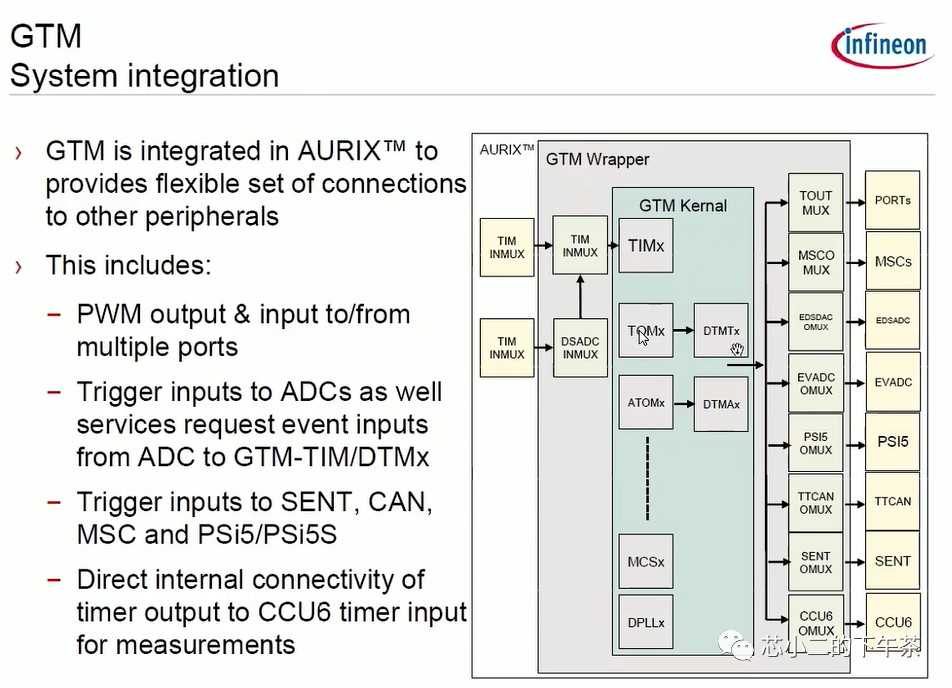
GTM系统层面,有一层Wrapper,把控制需要用到的包括ADC,通信外设等集成在一起
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
TC377配置SMU FSP时,如何配置频率参数;三种模式有何区别,配置上有何区别?2025-08-08 2324
-
TC377如何将其恢复到初始状态?2024-09-09 2941
-
tc377烧录时连接正常,但Program失败了,为什么?2024-07-23 718
-
请问如何进行TC377 HSM软件复位而非TC377主机软件复位?2024-05-31 719
-
tc377需要在不中断的情况下通过UART发送数据,如何配置?2024-05-24 802
-
如何在tc377启动软件时检查SSH实例的内存是否已初始化?2024-05-22 931
-
TC377如何访问EMEM内存?2024-03-04 995
-
如何通过TC377的TIM实现软件正交解码?2024-02-04 773
-
TC377中如何使用这个SCU接口信号-SMU_EMGSTP_REQ?2024-01-31 1268
-
NMI在TC377中是如何运作的?2024-01-30 851
-
TC377上拉下拉以及高阻值时,高、低电平的判断值为多少?2024-01-19 685
-
求一种基于Aurix TC377的BLDC驱动系统设计方案2023-08-03 1169
全部0条评论

快来发表一下你的评论吧 !
