

PVDF压电纤维仿生柔性传感器水下传感特性介绍
MEMS/传感技术
描述
自然界中,许多动物拥有感知周边环境并做出反应的能力,这对动物的生存起着至关重要的作用。例如,两栖动物海豹利用胡须对水下情况进行感知,以便锁定鱼群的位置,以及躲避鲨鱼和虎鲸的追捕。
据麦姆斯咨询报道,受水生动物的触须启发,扬州大学机械工程学院边义祥教授团队设计和制备了一种表面四电极聚偏氟乙烯(PVDF)压电纤维柔性传感器,该传感器对不同激励的感知性能很好,速度检测极限可达0.15 mm/s,且有良好的方向性检测能力,在水下情况感知方面应用前景广阔。相关研究成果已发表于《压电与声光》期刊。
水生动物胡须由柔软的毛组织构成,当受到刺激时毛组织会发生变形。海豹触须的剖面图结构如图1所示。其纤毛发生变形后刺激底部的神经细胞产生神经冲动,然后传递给大脑,海豹由此判断水中物体的运动和方向。研究人员仿造海豹触须结构,设计制备了一种基于PVDF压电纤维的仿生柔性传感器。将PVDF颗粒在200℃条件下加热至熔融状态,让其覆盖在金属纤维表面,形成一层PVDF包覆层,在空气中完全冷却后可得到一段含金属芯的PVDF压电纤维。之后对压电纤维进行极化使其具备压电性,制备出表面涂导电银漆部分带电、未涂导电银漆部分不带电的四电极PVDF压电纤维。
将上述处理好的PVDF压电纤维抽去金属芯,裁剪至合适大小,抽去金属芯部分用类似动物触须的光纤代替,使传感器具备更好的柔性。此外,研究人员对传感器进行了防水处理,并增加了旋转基座以调整传感器角度,进而制备出了可在水下进行实验测试的四电极PVDF压电纤维仿生柔性传感器。
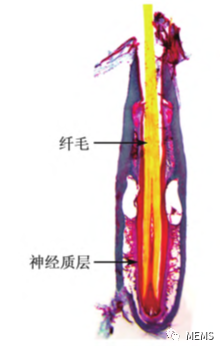
图1 海豹触须的剖面图结构
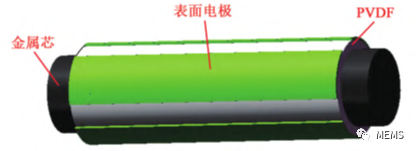
图2 四电极PVDF压电纤维
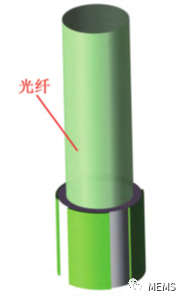
图3 抽去金属芯的PVDF压电纤维
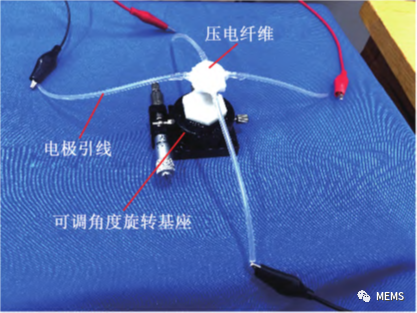
图4 四电极PVDF压电纤维仿生柔性传感器
研究人员验证了该传感器对水下情况的感知性能(包括对不同激励信号感知、水动力感知及方向性感知)。利用激振器输出正弦、三角、冲击和方波信号在水下固定位置进行激励,以测试所制备的传感器对水下不同信号的感知性能。经测试,该传感器能够对水下不同激励实现准确感知。
在水动力感知测试中,通过改变激振源到传感器的距离调整流速,以计算传感器检测到的流速大小,结果表明该传感器的灵敏度为0.06 pC/(mm/s),量程为0.15 ~ 98.7 mm/s,可检测的速度检测极限是0.15 mm/s,与其他检测流速的传感器相比,灵敏度较高,检测极限较小。在方向感知测试中,当在一固定点处激励,改变传感器角度后,传感器的两组电极输出的电荷和角度呈现“8”字型,说明所制备的传感器具有良好的方向感知能力。
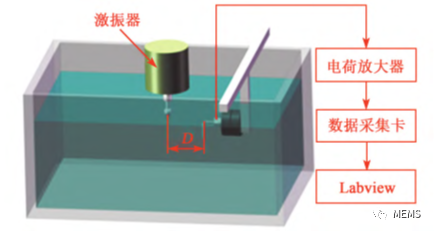
图5 实验装置示意图
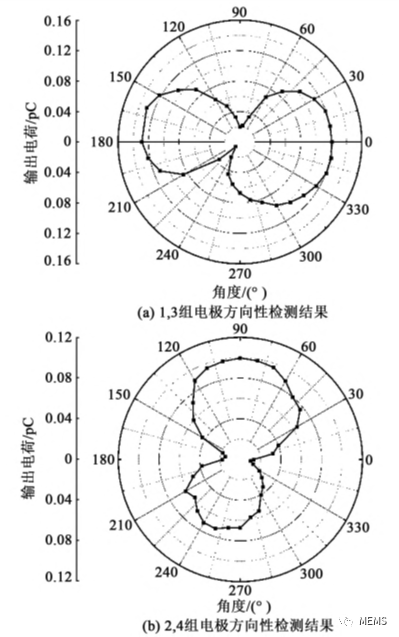
图6 两组电极方向性检测结果
这项研究提出的表面四电极PVDF压电纤维仿生柔性传感器能够对水下不同的激励实现准确感知,灵敏度较高,检测极限较小,且有良好的方向性检测能力,未来有望在水下感知等领域获得广泛应用。
审核编辑:刘清
-
新加坡国立大学:研发用于水下传感应用的自激式线性神经形态柔性压力传感器2026-01-05 849
-
基于AoDV改进的水下传感器网络多径路由策略2023-10-08 666
-
SE_MAC_一种节能的水下传感器网络MAC协议_张梦娜2021-07-26 964
-
基于水平集的水下传感器节点布置方法2021-06-07 839
-
基于多普勒测速的水下传感器通信同步算法2021-05-27 1075
-
基于压电薄膜(PVDF)传感器以及无线传输的振动信号测量系统2020-08-26 2597
-
水下传感器网络中继选择及功率分配2018-02-01 1457
-
河流水下传感器网络路由算法2017-12-18 870
-
AUV辅助的水下传感器网络时钟同步算法_常帅2017-03-19 1057
-
基于低能耗自适应的水下传感器网络定位算法2017-01-03 835
-
PVdF压电薄膜脉搏传感器研制2011-12-19 2549
-
一种高效覆盖的水下传感器网络部署策略2009-11-18 603
-
用PVDF传感器测量梁的振动功率流2009-07-14 1332
全部0条评论

快来发表一下你的评论吧 !
