

自动驾驶中基于网格的交通场景感知介绍
汽车电子
描述
本文介绍了自动驾驶中基于网格的交通场景感知:研究综述。基于网格的感知是移动机器人感知和导航的关键领域。尽管如此,在自动驾驶中以网格为中心的感知不如以目标为中心的感知那么常用,因为自动驾驶汽车需要精确感知高度动态的大规模室外交通场景,并且以网格为中心的感知具有较高复杂度和计算代价。深度学习技术和硬件的快速发展为以网格为中心的感知提供了新的视角,并且使得很多实时算法得以部署。目前的工业和学术研究证明了以网格为中心的感知具有较大优势,例如全面的精细环境表示、对遮挡具有更强鲁棒性、更高效的传感器融合以及更安全的规划策略。鉴于目前缺乏对这一快速发展领域的调研,本文对自动驾驶汽车中基于网格的感知进行分层结构化的回顾。本文总结了先前和目前占据网格技术的知识,并且从三方面对算法进行系统深入地分析:特征表示、数据效用和自动驾驶系统中的应用。最后,本文总结了当前的研究趋势,并且提供了一些可能的未来展望。
主要贡献
本文的贡献总结如下:
1)据我们所知,本文首次从自动驾驶的各个角度全面回顾了以网格为中心的感知方法;
2)本文提供了以网格为中心的感知技术的结构化和分层概述,并且分析了学术界和工业界对自动驾驶中以网格为中心的感知的看法;
3)本文总结了对当前趋势的观测,并且为以网格为中心的感知提供了未来展望。
论文图片和表格

总结
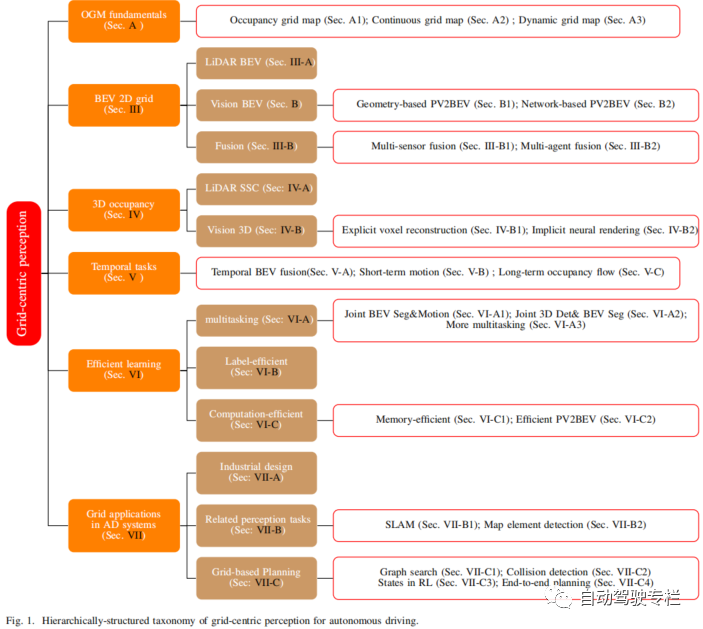
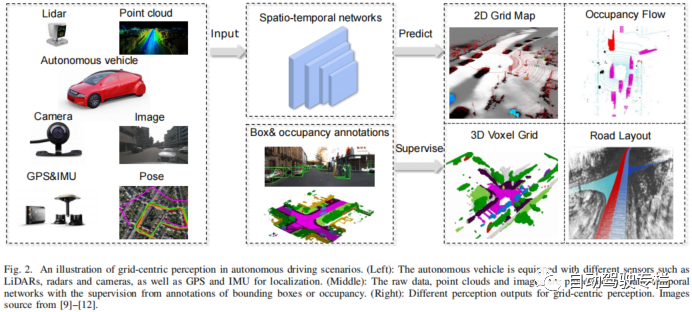
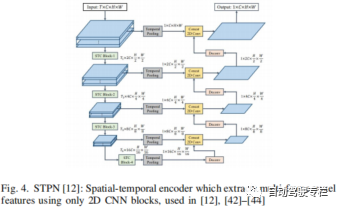
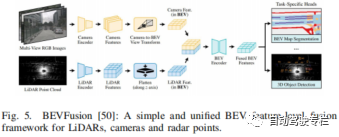
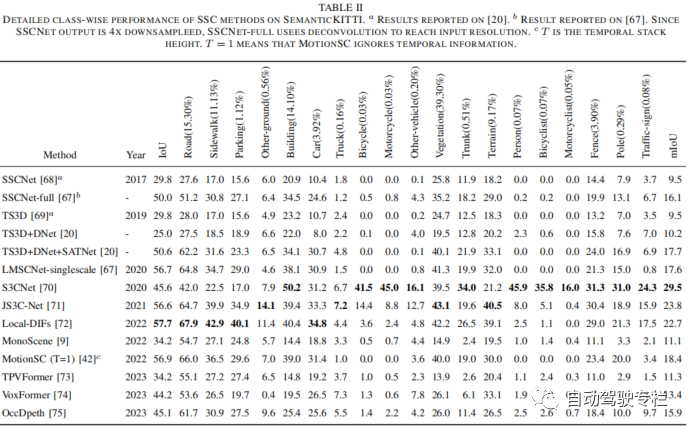
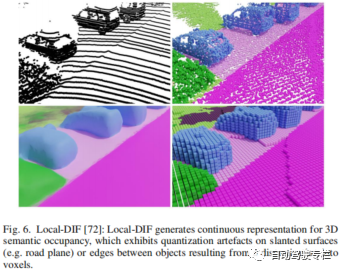
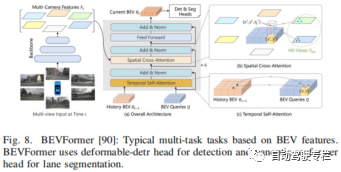
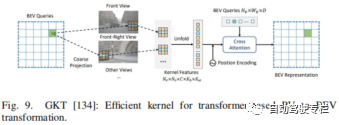
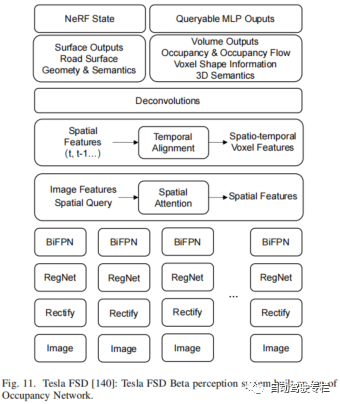
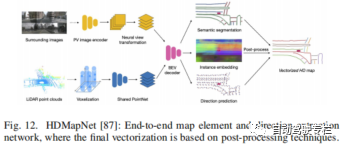
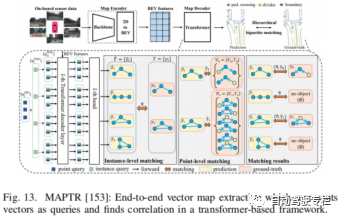
本文对自动驾驶中成熟和新兴的以网格为中心的感知进行了全面回顾和分析。背景从以网格为中心的感知的问题定义、数据集和评估指标的介绍开始。对于最常用的BEV 2D网格,给出了各种传感器(包括激光雷达、相机、毫米波雷达以及多模态融合)的特征表示。此外,本文进一步研究了3D网格表示,其中包括基于激光雷达的语义场景补全以及基于相机的显式重建和隐式表示。
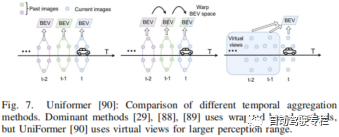
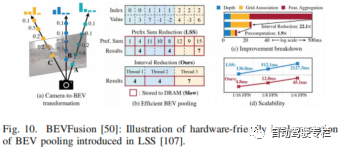
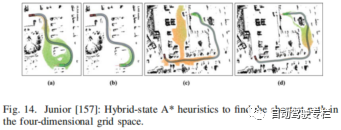
对于以网格为中心的感知中的时间模块的进展,本文回顾了历史信息的顺序聚合、短期运动预测以及长期占据流。之后,我们对以网格为中心的感知领域中的高效学习进行深入研究,其中包括模型高效的多任务框架、标注高效的学习算法、内存高效的3D建图结构以及计算高效的基于体素的算子。本文回顾了以网格为中心的感知在整个自动驾驶系统中的作用、工业设计、相关感知任务以及与规划方法的联系。最终,本文总结了基于网格感知的当前研究趋势和未来展望。作者希望本文能够探索基于网格的感知在自动驾驶汽车上的未来发展和部署。
- 相关推荐
- 热点推荐
- 传感器
- 移动机器人
- 激光雷达
- 自动驾驶汽车
- 纯电动汽车(BEV)
-
未来已来,多传感器融合感知是自动驾驶破局的关键2024-04-11 2448
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8426
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14483
-
自动驾驶真的会来吗?2016-07-21 14631
-
自动驾驶的到来2017-06-08 7501
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 6180
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3332
-
车联网对自动驾驶的影响2019-03-19 3622
-
如何让自动驾驶更加安全?2019-05-13 3797
-
智能感知方案怎么帮助实现安全的自动驾驶?2019-07-31 3325
-
自动驾驶汽车中传感器的分析2020-05-14 3659
-
转发:聊聊边缘计算在自动驾驶中的应用场景2020-07-21 4998
-
UWB高精度定位在自动驾驶中的应用前景2020-10-26 2898
-
网联化自动驾驶的含义及发展方向2021-01-12 4980
-
自动驾驶技术的实现2021-09-03 3286
全部0条评论

快来发表一下你的评论吧 !
