

微传科技推出汽车轮速传感器新品VCW1885/VCW1886
MEMS/传感技术
描述
01
市场背景
ABS防抱死制动系统作为汽车上最重要的安全系统之一,主要用于在汽车制动时,自动控制制动器制动力的大小,防止汽车在紧急刹车时车轮抱死,使汽车在制动状态下仍能转向,保证汽车的制动方向稳定性,并避免滑移和甩尾等危险情况的发生。汽车轮速传感器作为ABS系统中的关键传感元件,主要用于测量汽车车轮转速。轮速传感器检测每个车轮转动的转速信号,并传输给ABS的ECU系统。当车速达到设定值时,紧急刹车制动,ABS系统就开始工作,实现控制制动,从而使汽车刹车达到最佳刹车距离。
目前市面上轮速传感器主要有:磁电式轮速传感器、霍尔式轮速传感器以及磁阻式轮速传感器。磁电式轮速传感器虽然结构简单,无需供电,但其响应频率不高,当车速过低时,信号太弱,当车速过高时,容易产生误差信号,并且其抗电磁波干扰能力差,测试准确度较低。霍尔式轮速传感器利用霍尔效应原理制成,频率响应高,抗电磁波干扰能力强,是目前市场上使用广泛的轮速传感器之一。而磁阻式轮速传感器是霍尔式轮速传感器的升级,相较于霍尔技术,在灵敏度、精度、信噪比和抗干扰能力等性能上都有一个量级的提升,在汽车轮速传感器应用上,有着突出的性能优势。
VCW1885/ VCW1886是微传科技开发的首款磁阻式汽车轮速传感器,用于ABS系统,可实时提供汽车车轮轮速、转向、工作气隙等关键信息。VCW1885/ VCW1886基于各向异性磁阻(AMR)的工作原理,相对于霍尔式轮速传感器主要优势在于:
1
AMR磁阻式轮速传感器具有极低的jitter(<0.1%),远低于霍尔式轮速传感器的2~3%,使其在能够精确监测轮速的同时,还具有胎压监测功能。
2
AMR磁阻式轮速传感器能容忍更大的感应气隙Airgap,最大可达5.5mm左右,在剧烈颠簸的路况下也不易丢失信号,具有优秀的鲁棒性。
3
AMR磁阻式轮速传感器相对于霍尔式更易于安装,侧面感应时无需弯折。
4
AMR磁阻式轮速传感器高精度、高响应以及优异的防震动、高稳定等性能,在自动泊车辅助功能上有更加明显的性能优势,是汽车自动驾驶的制动系统的安全保障。
02
新品介绍
VCW1885/1886是微传科技自主研发的一款主动式/被动式磁阻轮速传感器,它在一个超小型封装内集成了AMR磁阻传感器和高精度数模处理电路以及滤波电容,同时在封装体表面安装一个永磁背磁铁,客户可直接将其与充磁磁环、铁磁性齿轮配合使用,无需额外配件。
VCW1885/1886灵敏度高、响应快,可实现高动态范围的响应,支持从零转速到4.25KHz的高转速测量,满足各种车型各种极端情况下轮速测量的要求。与此同时,其内部具有特殊的差分电路设计,对汽车上复杂电磁环境引起的静态和动态磁场都具有极强的抗干扰性。
VCW1885/1886采用两线式电流输出,具有三种输出协议类型,分别为标准协议,PWM协议,和AK协议输出类型。
VCW1885/1886产品性能在jitter值、感应气隙airgap等重要参数方面已达到国际领先NXP KMI83/84系列产品水平,在响应频率上更优,可实现NXP的KMI83/84轮速传感器的完美国产替代。
03
工作原理
1
工作原理
VCW1885/ VCW1886分别为主动式、被动式磁阻传感器,安装于汽车车轮的轮毂。如下图所示,主要工作原理区别在于:(a)主动式,对应的车轮齿圈为N/S磁极交替排列的磁性轮,此时传感器芯片感受N/S磁极的交替磁场,在车轮旋转时,输出对应N/S磁极变化的轮速信息;(b)被动式,对应的车轮齿圈为典型的铁磁性齿轮,此时传感器芯片在背磁铁的帮助下感受齿顶和齿底处不同的交替磁场,在车轮旋转时,输出对应齿顶和齿底交替变化的轮速信息。
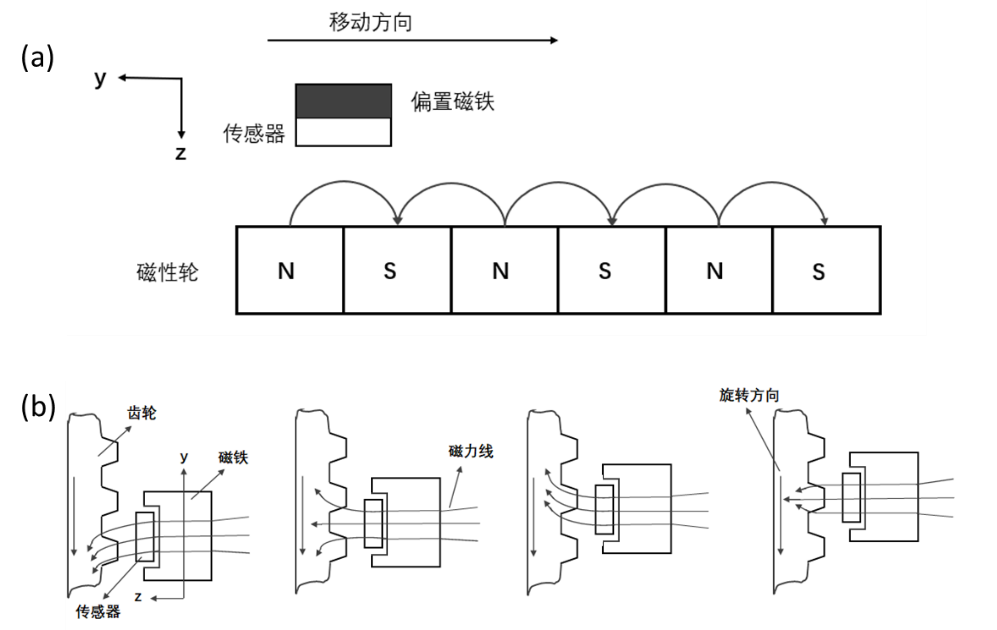
主动式/被动式工作原理图
1.1 主动式VCW1885的感应方向与N/S多极磁环的旋转方向平行,当多极磁环旋转时,则沿着旋转方向上会产生周期性的磁场变化,而传感器感应周期变化的磁场,进而输出相应的速度脉冲信号。在实际使用时,贴有背磁铁的封装体表面远离多极磁环,而无背磁铁的表面接近多极磁环,如下图所示。
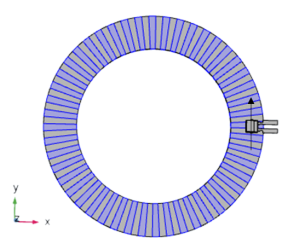
主动式汽车轮速传感器感测方向图
1.2 被动式VCW1886的感应方向与铁磁性齿轮的旋转方向平行,当齿轮旋转时,则沿着旋转方向上会产生周期性的磁场变化,而传感器感应周期变化的磁场,进而输出相应的速度脉冲信号。在实际使用时,贴有背磁铁的封装体表面远离齿轮,而无背磁铁的表面接近齿轮,如下图所示。
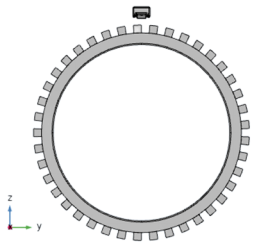
被动式汽车轮速传感器感测方向图
2
功能模块
VCW1885/ VCW1886主要功能模块如带隙基准电压源、ADC电路、数字处理电路、脉冲驱动电路等都有专门优化和改进,避免了传统电路结构复杂、抗干扰性不足的缺点,解决了过去由于轮速过低或过高而不能准确处理信号的问题,与此同时保证传感器芯片在极大的温度范围、较宽的电压范围和多种电磁干扰的情况下仍能准确地运行,信号处理流程简单、输出信号精度高,同时具有优秀的电磁兼容性和高可靠性。
3
输出协议
3.1标准协议
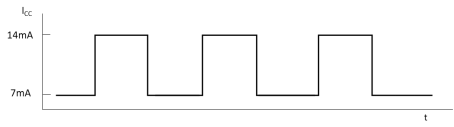
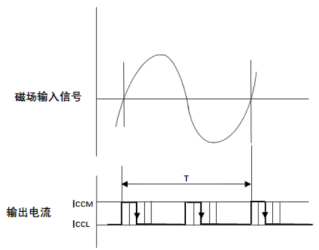
VCW1885/ VCW1886标准协议的输出为ICCL和ICCH的高低电流切换,当检测到基于磁场信号从正过零时,输出电流从ICCL向ICCH电流切换,当检测到磁场信号从负过零时,输出电流从ICCH向ICCL电流切换。ICCL和ICCH的典型值分别为7mA和14mA。标准协议的输出波形如下图所示,由输出波形的周期可以直接得到实时的轮速信息。
 、
、
标准协议输出
3.2 AK协议
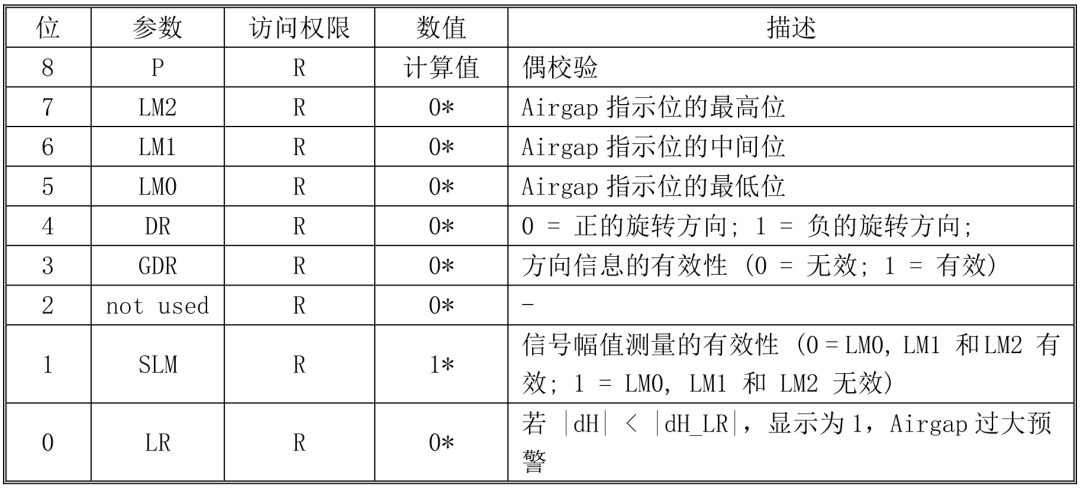
AK协议是汽车行业制定的特殊输出协议,VCW1885/ VCW1886基于AK协议4.0版来设计的,提供车轮转速、转向信息。如下图、表所示,描述了协议输出和数据位的信息。
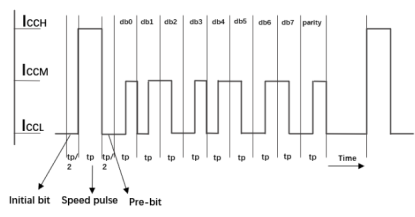
AK协议输出
AK协议的数据位信息(*为默认值)
3.3 PWM协议
VCW1885/ VCW1886也提供PWM协议输出,PWM脉冲信号提供车轮转速、转向和气隙的信息。在磁场信号每一次过零时,就会输出PWM脉冲信号,通过PWM脉冲信号的周期可以得到转速信息,通过PWM信号的脉冲宽度可以得到转向和工作气隙信息。PWM协议的脉宽调制方案如图下所示。
PWM协议输出
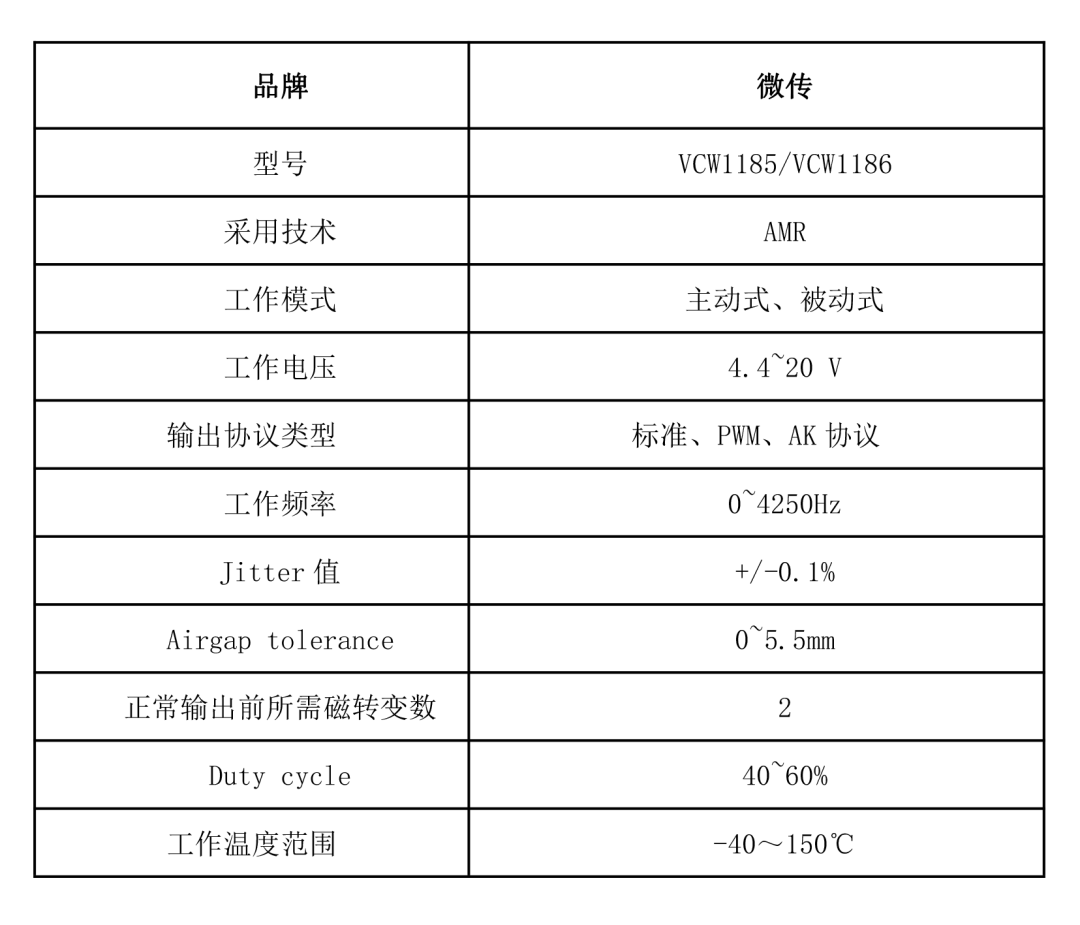
04
技术参数
审核编辑:刘清
-
纳芯微推出AMR技术轮速传感器,助力汽车安全2025-02-06 1478
-
轮速传感器:精准监测车轮转速的关键组件2025-01-23 1511
-
CAN总线在汽车轮速传感器设计中的应用2023-10-08 675
-
轮速传感器有什么作用,轮速传感器如何工作2023-06-30 20157
-
汽车示波器测量ABS轮速传感器信号及分析2021-12-07 2886
-
汽车的运动传感器信号包括哪些2021-08-26 1734
-
如何利用CAN总线去设计汽车轮速传感器?2021-05-12 1640
-
如何使用汽车示波器检查ABS轮速传感器2020-08-24 2507
-
轮速传感器坏了的现象_轮速传感器坏了是什么原因造成的2020-08-06 65495
-
轮速传感器工作原理_轮速传感器的作用2019-11-11 17816
-
霍尔式轮速传感器的识别与检测2018-11-16 12922
-
磁阻式轮速传感器在ABS中的应用2018-11-14 3105
-
ABS轮速传感器检测2018-10-30 4090
-
汽车轮速传感器测试(模拟)系统2017-04-18 13810
全部0条评论

快来发表一下你的评论吧 !
