

C++为什么没有被淘汰?
嵌入式技术
1418人已加入
描述
目前的三维视觉算法基本上都是用C++语言编写的,比如SLAM算法。既然这些算法都是C++编写的,必然有其自身原因。主要是因为,SLAM系统是一个实时性要求很强的系统,运行速度与精度都很重要。Python也有加速手段,但总体上C++比较接近底层,在执行效率和资源占用上要好很多。而且很多语言都是在C++或者C语言的基础上进行封装的。
C++一直都被称作是最难学的计算机语言,笔者从业多年,也认为确实如此。相比于其他几种语言,单纯从语法结构来说,C++都是比较困难的。何况很多同学并不是计算机专业出身,基础不是很扎实。SLAM算法都会集成了C++中的很多模块,还有大量的第三方库,对于初学者而言,想读懂这些算法源码肯定更是难上加难。然而,这些源码并不是无迹可寻,许多算法的编写都有比较固定的套路。
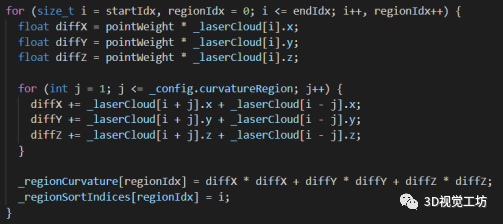
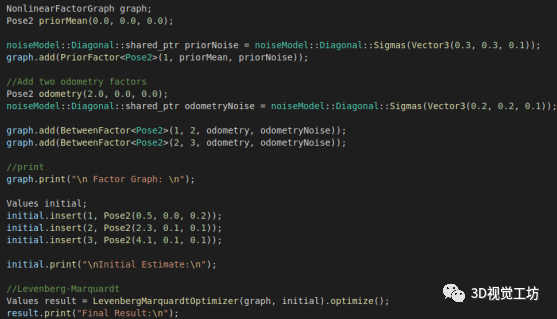
下图是某个SLAM算法中的部分源码。
本次课程,我们首先会用几讲的时间带大家过一遍C++的基础知识,然后对三维视觉中常用的几个C++模块进行重点讲解,主要有指针、引用、类和对象、宏和模板、STL编程、栈和队列、智能指针,多线程,CMakeList这几个章节,另外会附上足够多的实践案例,也会在课程中给大家讲解面试技巧和面试题。力求通过本次课程的学习,彻底搞懂C++较难的一些模块,掌握SLAM等算法的编写套路,学会C++相关岗位的面试技巧。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
为什么 C 语言没有被 C++ 取代?电路设计 2022-12-28
-
为什么 C 和 C++ 还没有被现在的时代淘汰呢? 易道云编程电路设计 2023-01-10
-
C++入门基础教程大全2010-05-29 989
-
C++C/C++程序设计教程_C/C++概述2015-12-25 738
-
如何提高c和c++的安全编程能力?《C和C++安全编码》带你详细学习2018-08-28 1297
-
C++程序设计教程之C++的初步知识的详细资料说明2019-03-14 1433
-
C和C++是一回事吗2020-11-13 4338
-
C语言和C++到底是什么关系2022-06-20 6595
-
如何用cplusplus来识别C和C++编译器2022-07-06 3616
-
C++学习笔记之c++的基本认识2023-03-17 1673
-
浅谈C语言与C++的前世今生2023-05-26 1062
-
C语言 / C++基础面试知识大集合2022-05-26 2306
-
C++之父新作带你勾勒现代C++地图2023-10-30 2103
-
C++简史:C++是如何开始的2024-01-11 2007
-
Keil这么难用,为什么还没有被淘汰?2024-05-18 2761
全部0条评论

快来发表一下你的评论吧 !
