

机器人变位机协调运动设置方法是什么
机器人
554人已加入
描述
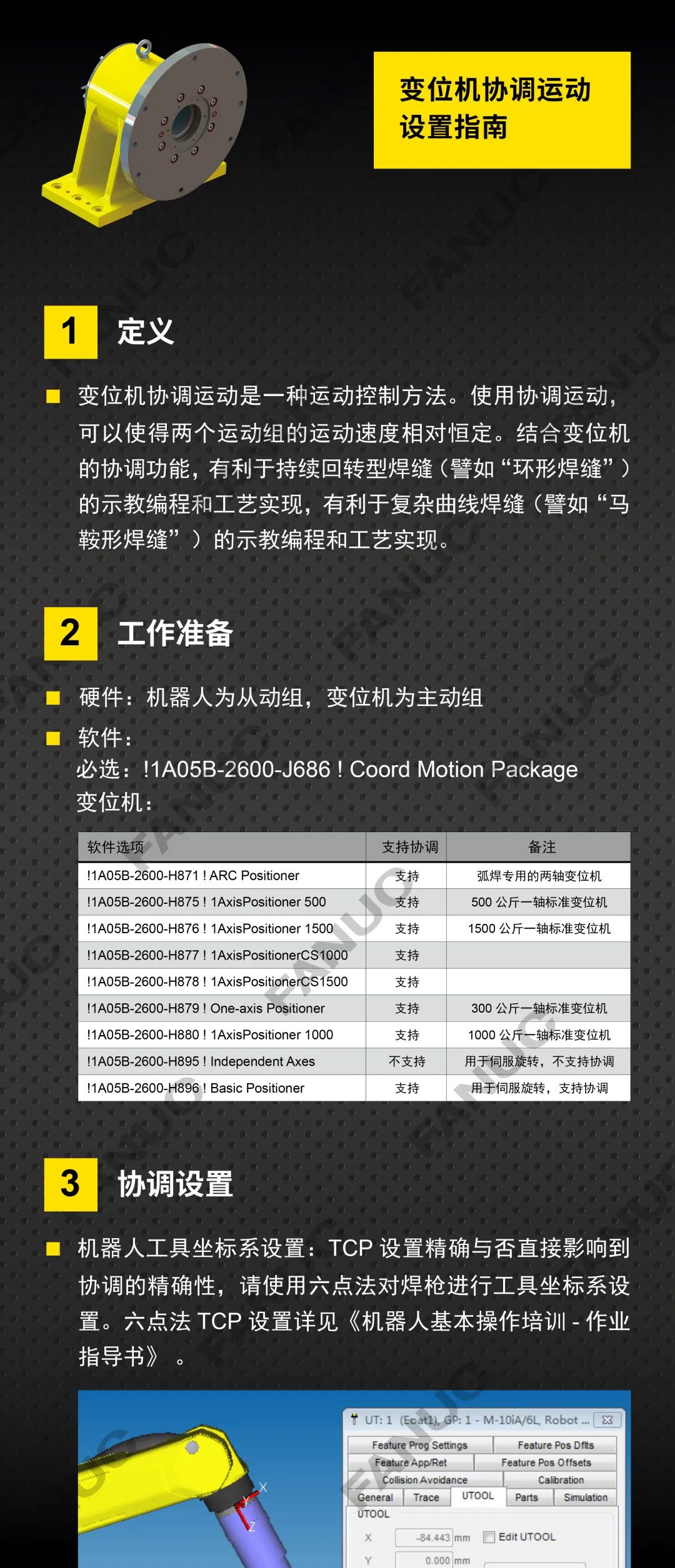
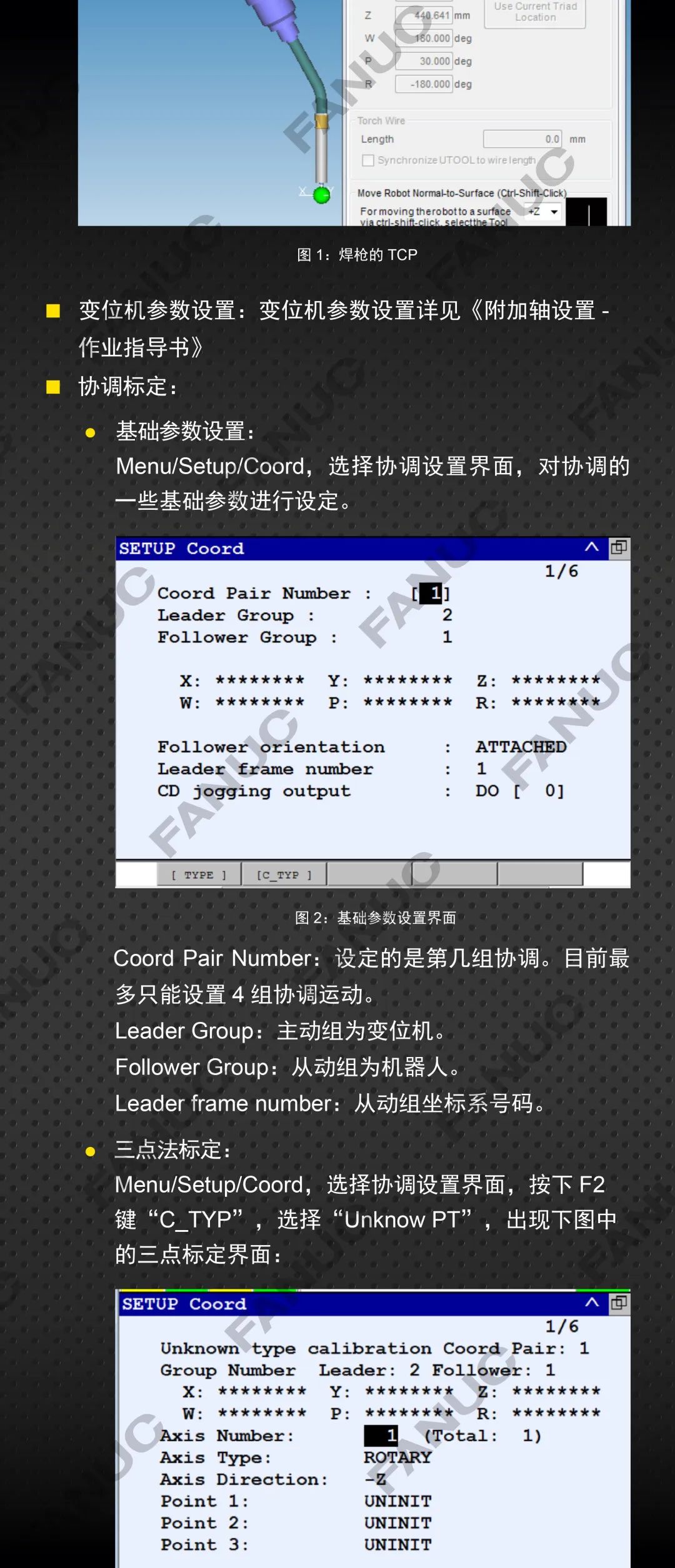
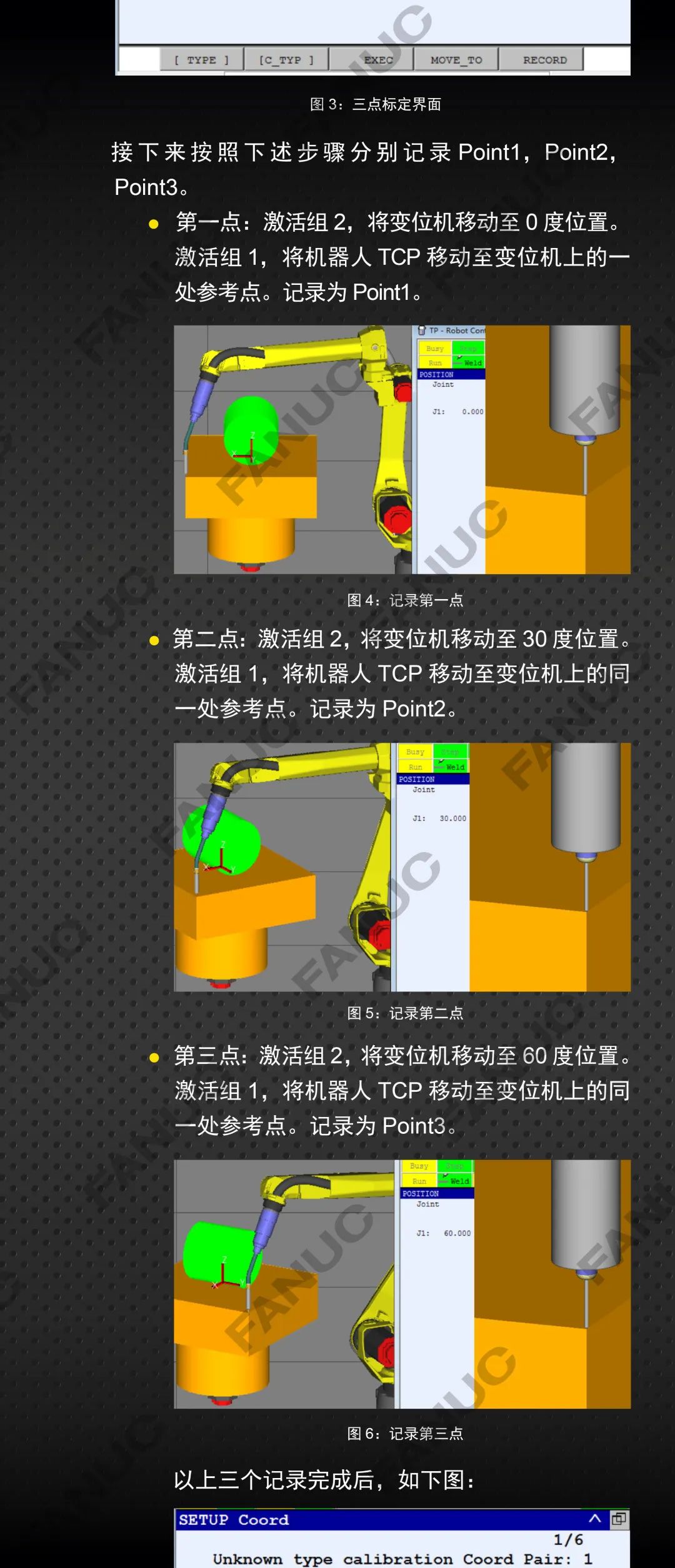
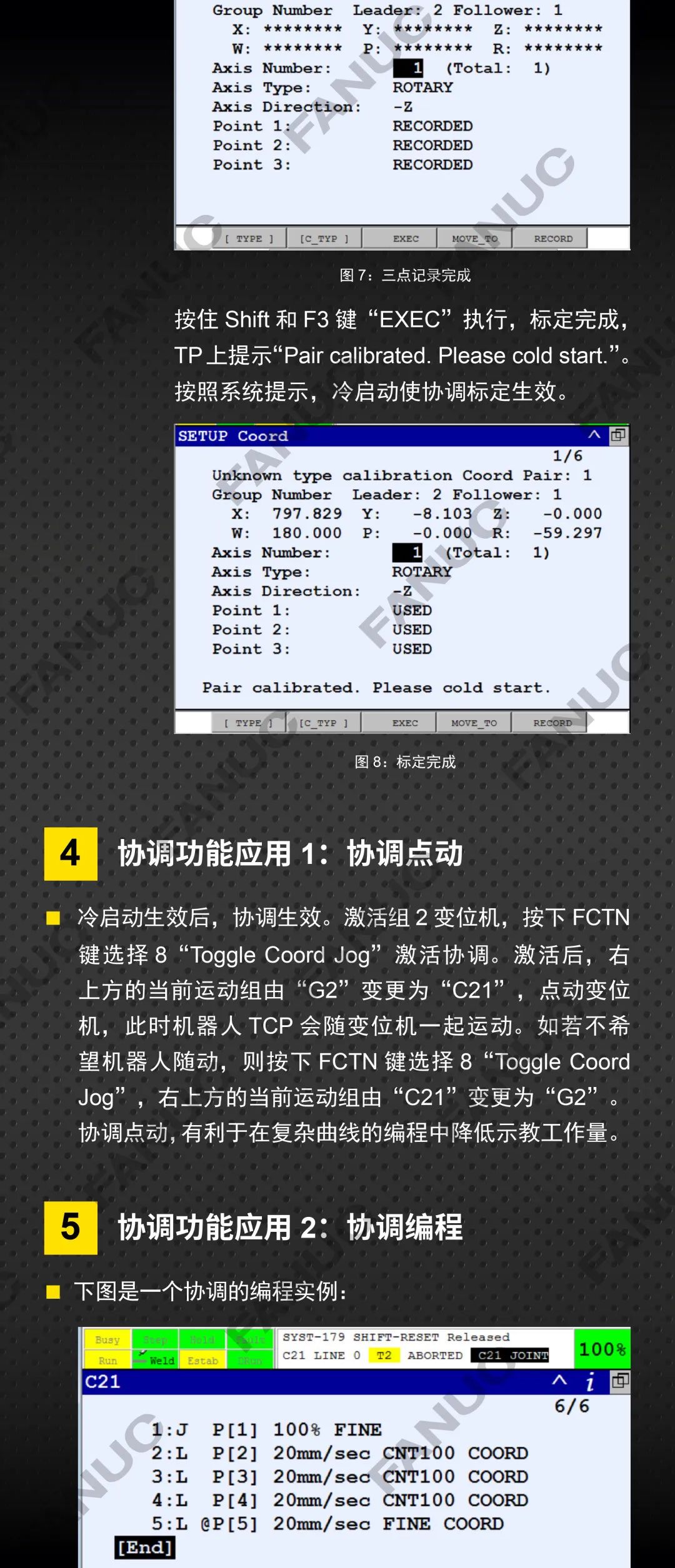
变位机协调运动是一种运动控制方法。使用协调运动,可以使得两个运动组的运动速度相对恒定。结合变位机的协调功能,有利于持续回转型焊缝(譬如“环形焊缝”)的示教编程和工艺实现,有利于复杂曲线焊缝(譬如“马鞍形焊缝”)的示教编程和工艺实现。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
深度剖析:MT6816 磁编码 IC 在机器人焊接变位机中的应用2024-08-15 1865
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 3996
-
焊接机器人配合变位机的优点2023-12-05 1386
-
机器人和变位机怎么协调运行2023-11-09 1404
-
[8.2.1]--焊接变位机和机器人的协调运动(圆管对接)jf_75936199 2023-01-31
-
机器人路线规划2022-11-18 10849
-
焊接变位机对焊接机器人的作用2021-09-26 2544
-
四足机器人的机构设计2021-09-15 2146
-
机器人运动控制技术2021-07-28 2372
-
关于可穿戴型下肢助力机器人感知系统研究2020-04-27 2819
-
基于图像的NAO机器人松协调运动研究2018-03-21 838
-
基于机器人的曲线焊接系统2018-03-13 5258
-
先进机器人控制2017-09-19 4613
-
机器人依靠什么装置运动?2015-02-03 6285
全部0条评论

快来发表一下你的评论吧 !
