

机载雷达和电子对抗的相关概念和技术
描述
今天介绍的这篇论文主要讨论了机载雷达和电子对抗的相关概念和技术。论文原文有94页,下面是学习的一些基础知识,更多内容可以发送“230805”查看原文学习。
首先,文章介绍了脉冲多普勒雷达的基本原理和功能。脉冲多普勒雷达具有测量目标距离和速度的能力,这是通过发射脉冲信号并接收从目标反射回来的信号来实现的。由于目标的移动,接收到的信号的频率会发生变化,这就是常说的多普勒效应。通过分析多普勒频率的改变,雷达系统可以确定目标的速度和位置。
文章还探讨了地面杂波、脉冲压缩以及电子对抗等概念。地面杂波是一个雷达系统在检测飞行物体时需要面对的问题,主要是由地面特征(如建筑物、山脉或海波)产生的反射。而脉冲压缩则是一种处理方法,可以提高雷达的分辨率和灵敏度。
在电子对抗方面,文章详细介绍了数字射频存储器(DRFM)技术。这是一种用于创建虚假目标和干扰信号的方法,其目的是混淆雷达系统,使雷达无法准确判断真实目标的位置和速度。
最后,文章还谈到了雷达干扰的不同形式和对策。雷达干扰可以分为有源干扰和无源干扰。有源干扰包括发射虚假的雷达信号,误导敌方雷达;无源干扰则包括使用反射材料或其他方式,使得雷达无法正确检测到目标。而对于这些干扰,雷达系统可能需要采用各种策略进行防御,比如使用更高级的信号处理技术、增加雷达频率,或者采用更复杂的编码方式。
总的来说,这篇文章为提供了关于机载雷达和电子对抗的基本知识和技术的全面了解,无论是已经在这个领域工作的专业人士,还是刚刚入门的新手,都有着较大的参考价值。
选择脉冲重复间隔
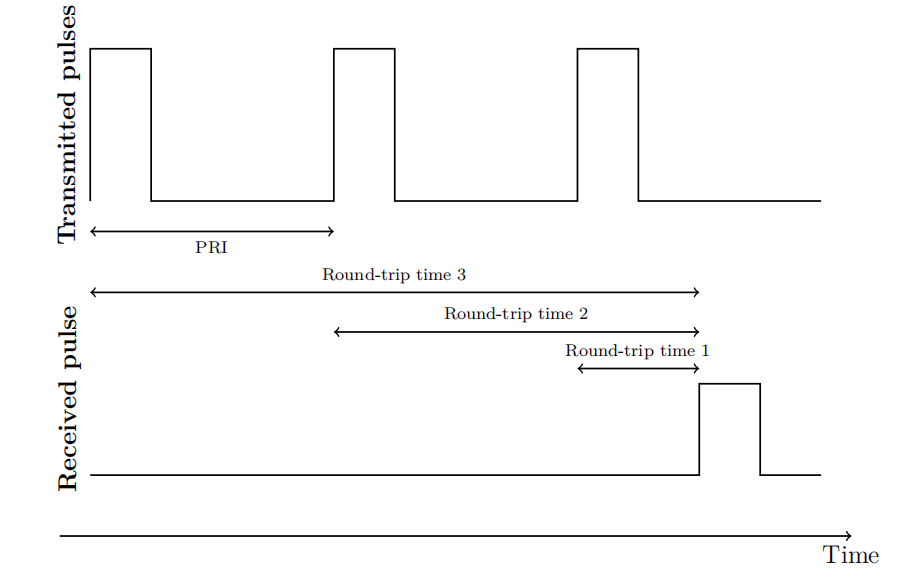
选择脉冲重复间隔(Pulse Repetition Interval,PRI)以获取更准确的雷达测量结果的确是一个权衡的过程。
选择较低的PRI,频谱中的旁瓣间隔会比较大,这意味着可以更精确地测量目标的速度,因为不同速度的目标在频谱中的峰值位置会有明显的差别。然而,这也导致最大无模糊测量距离变小,也就是说,能够准确测量的距离会变得更短。
选择较高的PRI,可以在更远的距离上测量目标,这就提高了最大无模糊测量距离。但这也意味着频谱中的旁瓣会接近真实频率峰值,可能会导致目标的速度测量出现模糊,因为不同速度的目标在频谱中的峰值位置可能会非常接近。
因此,要得到理想的测量结果,需要在测量距离和速度测量的准确性之间进行权衡,选择合适的PRI。
在实际的空中作战中,雷达系统可能需要在多个PRI值之间切换,以解决测量距离和速度的模糊问题。一般来说,空中作战的典型PRI在百微秒数量级,每个PRI的脉冲数通常为几百个。这样做可以根据当前的作战环境和任务需求,灵活地调整雷达的性能。
理解距离-多普勒图
距离-多普勒图是一种在雷达信号处理中常用的工具,它可以根据雷达接收到的回波信号来展示目标的距离和速度。
当雷达发射一系列脉冲并接收回波信号,这个过程会生成一段连续的时间序列数据。这些数据随后被分割成离散的时间步长,也就是所谓的“距离门”。每一个距离门对应一段特定的距离区间,这个距离区间是由雷达脉冲的传播时间决定的。
雷达系统会对每一个距离门中的回波信号进行频谱分析,以此得到该距离区间内存在目标的多普勒频率(也就是目标的速度)。这样就可以根据每个距离门的多普勒频率分布来生成一个二维的距离-多普勒图。需要注意的是,每个接收间隔中的距离门数量主要取决于雷达的脉冲重复间隔和脉冲长度。
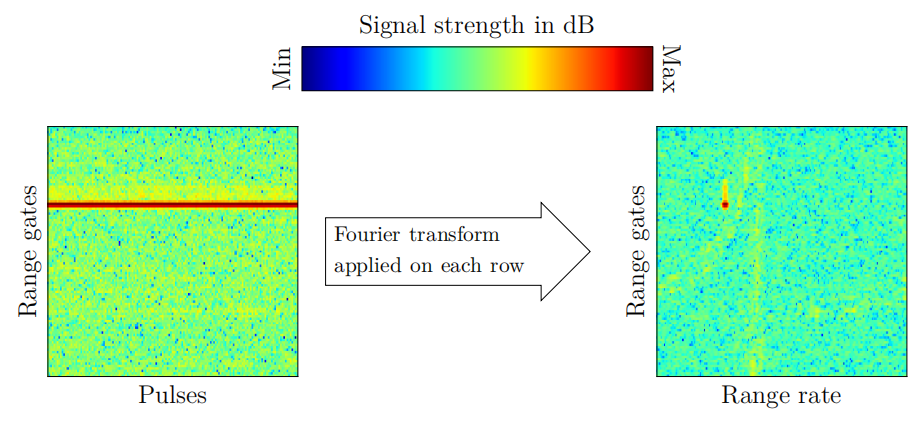
在雷达信号处理中,接收到的回波信号通常被转换为复数形式的I/Q数据,分别代表了原始信号的实部和虚部,或者可以理解为信号的两个正交分量。当雷达在各个距离门上接收回波信号时,每个距离门在每个接收间隔中的I/Q值都会被记录下来并存储成一个M×N的复数数组,其中M表示距离门的数量,N表示接收间隔(或脉冲)的数量。在这个数组中,每一行对应一个特定的距离门,每一列对应一个特定的接收间隔(脉冲)。
为了从时域转换到速度域(也就是得到目标的多普勒频率),对数组的每一行(即每个距离门的数据)进行傅里叶变换,并乘以一个窗函数进行加权。由于傅里叶变换可以将时域信号转换为频域信号,这样就可以得到每个距离门上目标的多普勒频率,进而生成距离-多普勒图。
卷积神经网络
可以使用卷积神经网络(Convolutional Neural Networks,CNN)来检测机载雷达中的干扰和干扰模式。卷积神经网络是一种深度学习模型,通常用于处理图像数据。在雷达信号处理中,CNN可以从距离-多普勒图中提取特征,并学习识别不同类型的干扰和干扰模式。 首先需要收集或生成大量的有标签的训练数据,包括正常的雷达回波信号,以及各种类型的干扰和干扰信号。然后,使用这些数据来训练CNN模型,使其能够区分正常信号和干扰信号。 在操作期间,雷达系统可以实时将接收到的回波信号转换为距离-多普勒图,并输入到预先训练好的CNN模型中。如果模型判断当前的信号包含干扰,雷达系统可以立即采取相应的对策,例如改变工作频率,或者启动电子对抗系统等。 这种方法具有很高的灵活性和适应性,因为CNN模型可以通过不断的学习和训练来适应新的干扰和干扰模式。而且,由于CNN模型可以并行处理大量数据,这种方法的计算效率也非常高。
审核编辑:汤梓红
-
电子对抗系统中的概率准则存在哪些缺陷?2011-12-15 2268
-
求有关电子对抗有关的matlab程序2013-06-03 3295
-
机载雷达面临哪些技术难题?机载雷达的信号是如何分布的?2021-06-21 2674
-
简述电子对抗综合模拟训练平台2021-09-01 2871
-
分布式仿真在电子对抗中的应用2009-06-09 571
-
某型飞机综合电子对抗系统的模拟实现2009-06-20 1163
-
机载电子对抗设备自动测试系统的开发2009-07-09 832
-
2010-2015年通信电子对抗设备市场研究及投资发展报告2011-02-23 1026
-
现代雷达电子对抗技术2011-08-30 1192
-
机载雷达对抗系统仿真2012-04-20 951
-
通信、雷达、导航与电子对抗2016-03-31 740
-
电子对抗原理及其应用介绍2017-11-16 1922
-
俄研发了三种武器,用于电子对抗无人机2018-07-16 2034
-
基于Simulink的电子对抗分布式仿真系统2021-06-22 1200
-
电子对抗系统有哪些2024-05-10 2826
全部0条评论

快来发表一下你的评论吧 !
