

faster rcnn网络结构详解(四个切入点)
人工智能
描述
本文从四个切入点为你介绍Faster R-CNN网络。
经过R-CNN和Fast RCNN的积淀,Ross B. Girshick在2016年提出了新的Faster RCNN,在结构上,Faster RCNN已经将特征抽取(feature extraction),proposal提取,bounding box regression(rect refine),classification都整合在了一个网络中,使得综合性能有较大提高,在检测速度方面尤为明显。
目录
1 Conv layers 2 Region Proposal Networks(RPN) - 2.1 多通道图像卷积基础知识介绍 - 2.2 anchors - 2.3 softmax判定positive与negative - 2.4 bounding box regression原理 - 2.5 对proposals进行bounding box regression - 2.6 Proposal Layer 3 RoI pooling - 3.1 为何需要RoI Pooling - 3.2 RoI Pooling原理 4 Classification 5 Faster RCNN训练 - 5.1 训练RPN网络 - 5.2 通过训练好的RPN网络收集proposals - 5.3 训练Faster RCNN网络 Questions and Answer
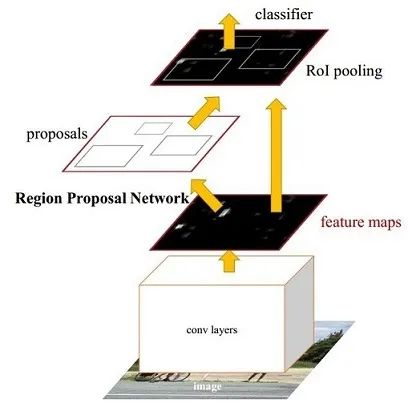
图1 Faster RCNN基本结构(来自原论文)
依作者看来,如图1,Faster RCNN其实可以分为4个主要内容:
Conv layers。作为一种CNN网络目标检测方法,Faster RCNN首先使用一组基础的conv+relu+pooling层提取image的feature maps。该feature maps被共享用于后续RPN层和全连接层。
Region Proposal Networks。RPN网络用于生成region proposals。该层通过softmax判断anchors属于positive或者negative,再利用bounding box regression修正anchors获得精确的proposals。
Roi Pooling。该层收集输入的feature maps和proposals,综合这些信息后提取proposal feature maps,送入后续全连接层判定目标类别。
Classification。利用proposal feature maps计算proposal的类别,同时再次bounding box regression获得检测框最终的精确位置。
所以本文以上述4个内容作为切入点介绍Faster R-CNN网络。 图2展示了python版本中的VGG16模型中的faster_rcnn_test.pt的网络结构,可以清晰的看到该网络对于一副任意大小PxQ的图像:
首先缩放至固定大小MxN,然后将MxN图像送入网络;
而Conv layers中包含了13个conv层+13个relu层+4个pooling层;
RPN网络首先经过3x3卷积,再分别生成positive anchors和对应bounding box regression偏移量,然后计算出proposals;
而Roi Pooling层则利用proposals从feature maps中提取proposal feature送入后续全连接和softmax网络作classification(即分类proposal到底是什么object)。
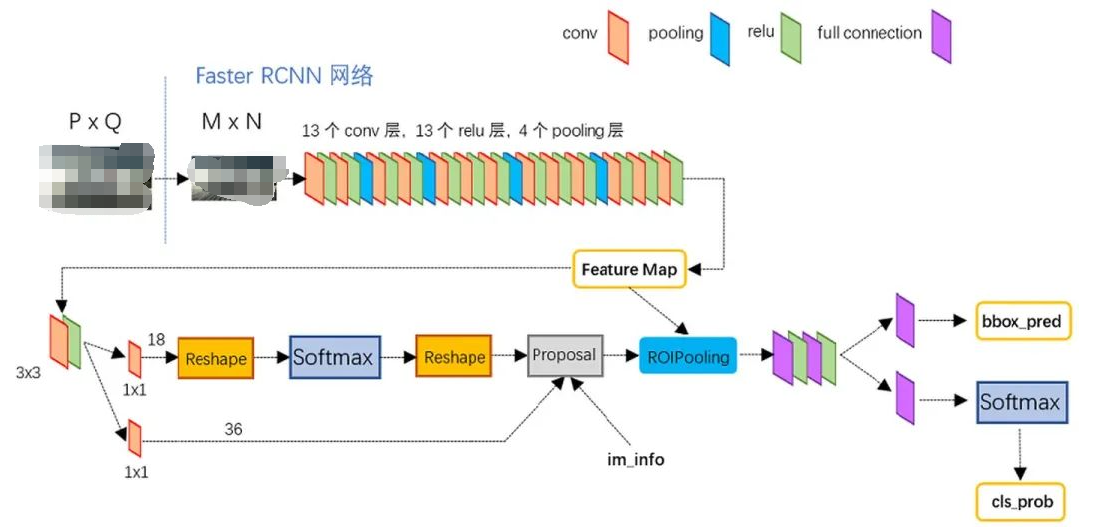
图2 faster_rcnn_test.pt网络结构 (pascal_voc/VGG16/faster_rcnn_alt_opt/faster_rcnn_test.pt)
本文不会讨论任何关于R-CNN家族的历史,分析清楚最新的Faster R-CNN就够了,并不需要追溯到那么久。实话说我也不了解R-CNN,更不关心。有空不如看看新算法。
新出炉的pytorch官方Faster RCNN代码导读:
捋一捋pytorch官方FasterRCNN代码
https://zhuanlan.zhihu.com/p/31426458
1 Conv layers
Conv layers包含了conv,pooling,relu三种层。以python版本中的VGG16模型中的faster_rcnn_test.pt的网络结构为例,如图2,Conv layers部分共有13个conv层,13个relu层,4个pooling层。这里有一个非常容易被忽略但是又无比重要的信息,在Conv layers中:
所有的conv层都是:kernel_size=3,pad=1,stride=1
所有的pooling层都是:kernel_size=2,pad=0,stride=2
为何重要?在Faster RCNN Conv layers中对所有的卷积都做了扩边处理( pad=1,即填充一圈0),导致原图变为 (M+2)x(N+2)大小,再做3x3卷积后输出MxN 。正是这种设置,导致Conv layers中的conv层不改变输入和输出矩阵大小。如图3:
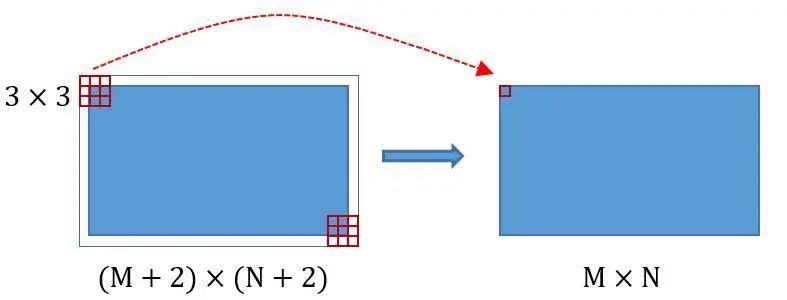
图3 卷积示意图
类似的是,Conv layers中的pooling层kernel_size=2,stride=2。这样每个经过pooling层的MxN矩阵,都会变为(M/2)x(N/2)大小。综上所述,在整个Conv layers中,conv和relu层不改变输入输出大小,只有pooling层使输出长宽都变为输入的1/2。 那么,一个MxN大小的矩阵经过Conv layers固定变为(M/16)x(N/16)!这样Conv layers生成的feature map中都可以和原图对应起来。
2 Region Proposal Networks(RPN)
经典的检测方法生成检测框都非常耗时,如OpenCV adaboost使用滑动窗口+图像金字塔生成检测框;或如R-CNN使用SS(Selective Search)方法生成检测框。而Faster RCNN则抛弃了传统的滑动窗口和SS方法,直接使用RPN生成检测框,这也是Faster R-CNN的巨大优势,能极大提升检测框的生成速度。
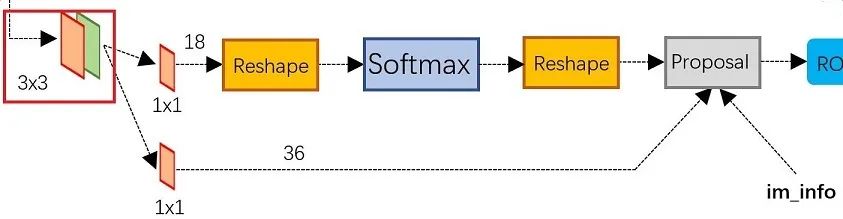
图4 RPN网络结构
上图4展示了RPN网络的具体结构。可以看到RPN网络实际分为2条线,上面一条通过softmax分类anchors获得positive和negative分类,下面一条用于计算对于anchors的bounding box regression偏移量,以获得精确的proposal。而最后的Proposal层则负责综合positive anchors和对应bounding box regression偏移量获取proposals,同时剔除太小和超出边界的proposals。其实整个网络到了Proposal Layer这里,就完成了相当于目标定位的功能。
2.1 多通道图像卷积基础知识介绍
在介绍RPN前,还要多解释几句基础知识,已经懂的看官老爷跳过就好。
对于单通道图像+单卷积核做卷积,第一章中的图3已经展示了;
对于多通道图像+多卷积核做卷积,计算方式如下:
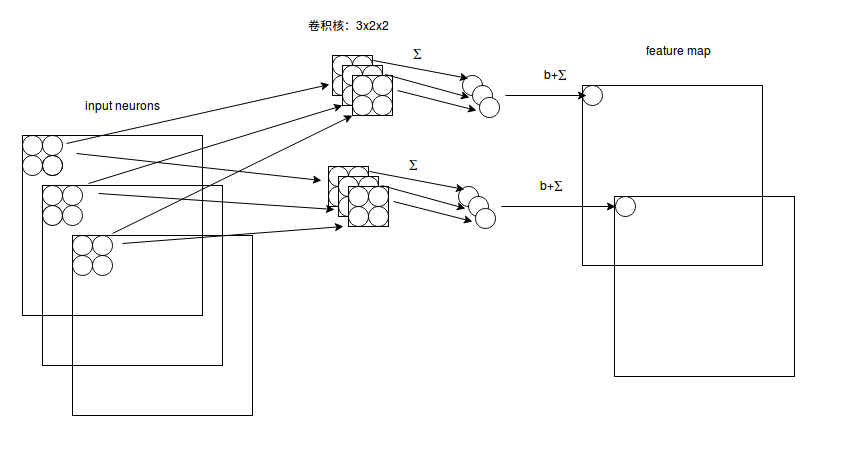
图5 多通道卷积计算方式
如图5,输入有3个通道,同时有2个卷积核。对于每个卷积核,先在输入3个通道分别作卷积,再将3个通道结果加起来得到卷积输出。所以对于某个卷积层,无论输入图像有多少个通道,输出图像通道数总是等于卷积核数量! 对多通道图像做1x1卷积,其实就是将输入图像于每个通道乘以卷积系数后加在一起,即相当于把原图像中本来各个独立的通道“联通”在了一起。
2.2 anchors
提到RPN网络,就不能不说anchors。所谓anchors,实际上就是一组由rpn/generate_anchors.py生成的矩形。直接运行作者demo中的generate_anchors.py可以得到以下输出:
[[ -84. -40. 99. 55.] [-176. -88. 191. 103.] [-360. -184. 375. 199.] [ -56. -56. 71. 71.] [-120. -120. 135. 135.] [-248. -248. 263. 263.] [ -36. -80. 51. 95.] [ -80. -168. 95. 183.] [-168. -344. 183. 359.]]其中每行的4个值
 表矩形左上和右下角点坐标。9个矩形共有3种形状,长宽比为大约为
表矩形左上和右下角点坐标。9个矩形共有3种形状,长宽比为大约为  三种,如图6。实际上通过anchors就引入了检测中常用到的多尺度方法。
三种,如图6。实际上通过anchors就引入了检测中常用到的多尺度方法。
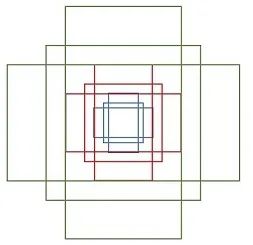
图6 anchors示意图
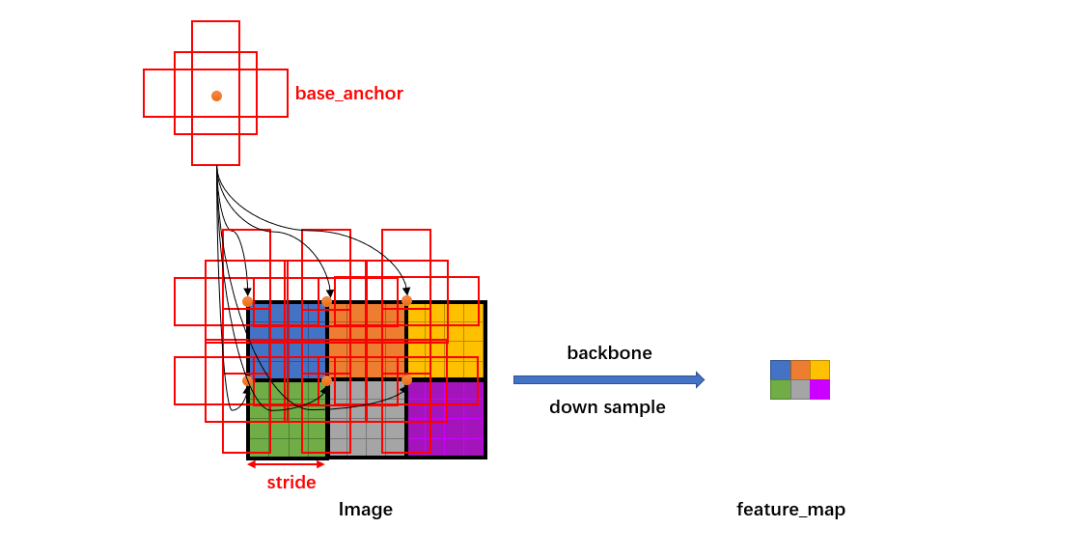
注:关于上面的anchors size,其实是根据检测图像设置的。在python demo中,会把任意大小的输入图像reshape成800x600(即图2中的M=800,N=600)。再回头来看anchors的大小,anchors中长宽1:2中最大为352x704,长宽2:1中最大736x384,基本是cover了800x600的各个尺度和形状。 那么这9个anchors是做什么的呢?借用Faster RCNN论文中的原图,如图7,遍历Conv layers计算获得的feature maps,为每一个点都配备这9种anchors作为初始的检测框。这样做获得检测框很不准确,不用担心,后面还有2次bounding box regression可以修正检测框位置。
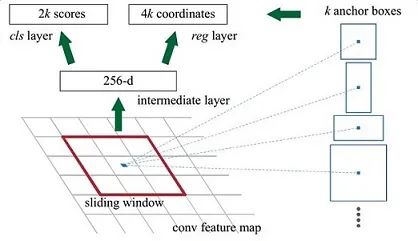
图7
解释一下上面这张图的数字。
在原文中使用的是ZF model中,其Conv Layers中最后的conv5层num_output=256,对应生成256张特征图,所以相当于feature map每个点都是256-dimensions
在conv5之后,做了rpn_conv/3x3卷积且num_output=256,相当于每个点又融合了周围3x3的空间信息(猜测这样做也许更鲁棒?反正我没测试),同时256-d不变(如图4和图7中的红框)
假设在conv5 feature map中每个点上有k个anchor(默认k=9),而每个anhcor要分positive和negative,所以每个点由256d feature转化为cls=2•k scores;而每个anchor都有(x, y, w, h)对应4个偏移量,所以reg=4•k coordinates
补充一点,全部anchors拿去训练太多了,训练程序会在合适的anchors中随机选取128个postive anchors+128个negative anchors进行训练(什么是合适的anchors下文5.1有解释)
注意,在本文讲解中使用的VGG conv5 num_output=512,所以是512d,其他类似。 其实RPN最终就是在原图尺度上,设置了密密麻麻的候选Anchor。然后用cnn去判断哪些Anchor是里面有目标的positive anchor,哪些是没目标的negative anchor。所以,仅仅是个二分类而已! 那么Anchor一共有多少个?原图800x600,VGG下采样16倍,feature map每个点设置9个Anchor,所以:

其中ceil()表示向上取整,是因为VGG输出的feature map size= 50*38。
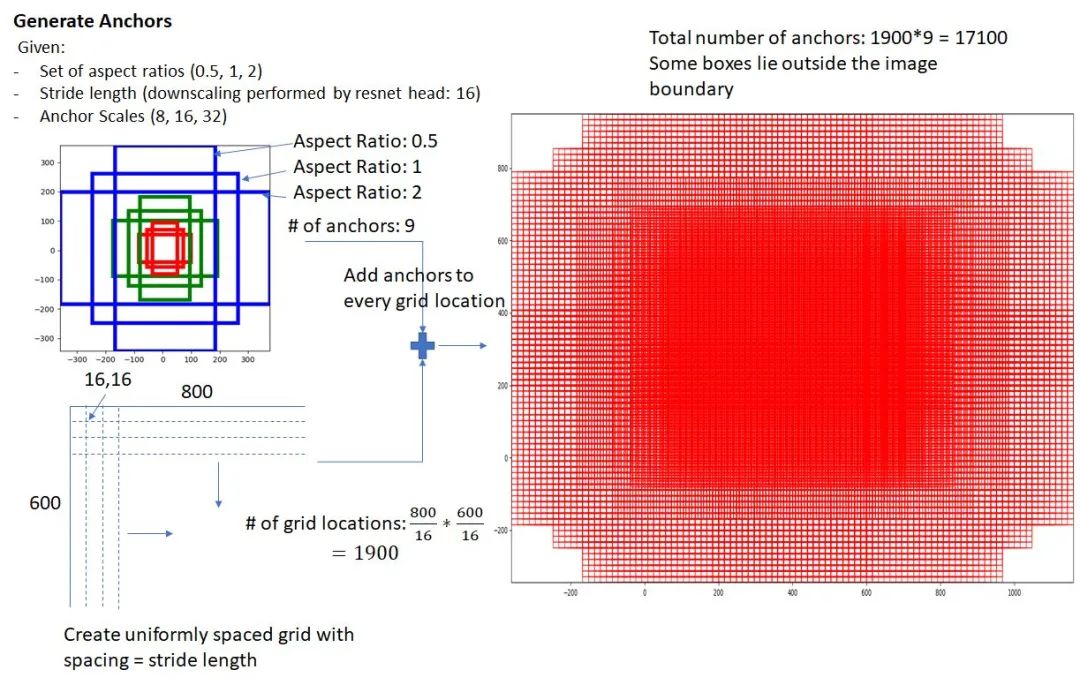
图8 Gernerate Anchors
2.3 softmax判定positive与negative
一副MxN大小的矩阵送入Faster RCNN网络后,到RPN网络变为(M/16)x(N/16),不妨设 W=M/16,H=N/16。在进入reshape与softmax之前,先做了1x1卷积,如图9:

图9 RPN中判定positive/negative网络结构
该1x1卷积的caffe prototxt定义如下:
layer {
name: "rpn_cls_score"
type: "Convolution"
bottom: "rpn/output"
top: "rpn_cls_score"
convolution_param {
num_output: 18 # 2(positive/negative) * 9(anchors)
kernel_size: 1 pad: 0 stride: 1
}
}
可以看到其num_output=18,也就是经过该卷积的输出图像为WxHx18大小(注意第二章开头提到的卷积计算方式)。这也就刚好对应了feature maps每一个点都有9个anchors,同时每个anchors又有可能是positive和negative,所有这些信息都保存WxHx(9*2)大小的矩阵。为何这样做?后面接softmax分类获得positive anchors,也就相当于初步提取了检测目标候选区域box(一般认为目标在positive anchors中)。 那么为何要在softmax前后都接一个reshape layer?其实只是为了便于softmax分类,至于具体原因这就要从caffe的实现形式说起了。在caffe基本数据结构blob中以如下形式保存数据:
blob=[batch_size, channel,height,width]
对应至上面的保存positive/negative anchors的矩阵,其在caffe blob中的存储形式为[1, 2x9, H, W]。而在softmax分类时需要进行positive/negative二分类,所以reshape layer会将其变为[1, 2, 9xH, W]大小,即单独“腾空”出来一个维度以便softmax分类,之后再reshape回复原状。贴一段caffe softmax_loss_layer.cpp的reshape函数的解释,非常精辟:
"Number of labels must match number of predictions; "
"e.g., if softmax axis == 1 and prediction shape is (N, C, H, W), "
"label count (number of labels) must be N*H*W, "
"with integer values in {0, 1, ..., C-1}.";
综上所述,RPN网络中利用anchors和softmax初步提取出positive anchors作为候选区域(另外也有实现用sigmoid代替softmax,输出[1, 1, 9xH, W]后接sigmoid进行positive/negative二分类,原理一样)。
2.4 bounding box regression原理
如图9所示绿色框为飞机的Ground Truth(GT),红色为提取的positive anchors,即便红色的框被分类器识别为飞机,但是由于红色的框定位不准,这张图相当于没有正确的检测出飞机。所以我们希望采用一种方法对红色的框进行微调,使得positive anchors和GT更加接近。
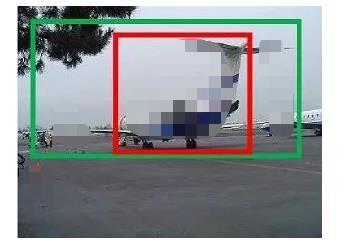
图10
对于窗口一般使用四维向量  表示,分别表示窗口的中心点坐标和宽高。对于图 11,红色的框A代表原始的positive Anchors,绿色的框G代表目标的GT,我们的目标是寻找一种关系,使得输入原始的anchor A经过映射得到一个跟真实窗口G更接近的回归窗口G',即:
表示,分别表示窗口的中心点坐标和宽高。对于图 11,红色的框A代表原始的positive Anchors,绿色的框G代表目标的GT,我们的目标是寻找一种关系,使得输入原始的anchor A经过映射得到一个跟真实窗口G更接近的回归窗口G',即:
给定anchor  ;
;
寻找一种变换F,使得: ,其中
,其中 。
。
图11
那么经过何种变换F才能从图10中的anchor A变为G'呢?比较简单的思路就是:
先做平移:
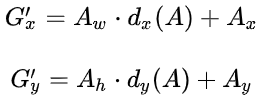
再做缩放:
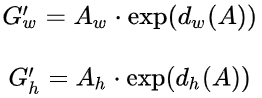
观察上面4个公式发现,需要学习的是 这四个变换。当输入的anchor A与GT相差较小时,可以认为这种变换是一种线性变换, 那么就可以用线性回归来建模对窗口进行微调(注意,只有当anchors A和GT比较接近时,才能使用线性回归模型,否则就是复杂的非线性问题了)。 接下来的问题就是如何通过线性回归获得
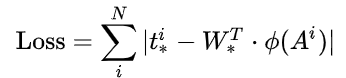
这四个变换。当输入的anchor A与GT相差较小时,可以认为这种变换是一种线性变换, 那么就可以用线性回归来建模对窗口进行微调(注意,只有当anchors A和GT比较接近时,才能使用线性回归模型,否则就是复杂的非线性问题了)。 接下来的问题就是如何通过线性回归获得  了。线性回归就是给定输入的特征向量X, 学习一组参数W, 使得经过线性回归后的值跟真实值Y非常接近,即Y=WX。对于该问题,输入X是cnn feature map,定义为Φ;同时还有训练传入A与GT之间的变换量,即
了。线性回归就是给定输入的特征向量X, 学习一组参数W, 使得经过线性回归后的值跟真实值Y非常接近,即Y=WX。对于该问题,输入X是cnn feature map,定义为Φ;同时还有训练传入A与GT之间的变换量,即 。输出是
。输出是 四个变换。那么目标函数可以表示为:
四个变换。那么目标函数可以表示为:

其中 是对应anchor的feature map组成的特征向量,
是对应anchor的feature map组成的特征向量,  是需要学习的参数,
是需要学习的参数, 是得到的预测值(*表示 x,y,w,h,也就是每一个变换对应一个上述目标函数)。为了让预测值
是得到的预测值(*表示 x,y,w,h,也就是每一个变换对应一个上述目标函数)。为了让预测值 与真实值
与真实值 差距最小,设计L1损失函数:
差距最小,设计L1损失函数:
函数优化目标为:

为了方便描述,这里以L1损失为例介绍,而真实情况中一般使用soomth-L1损失。 需要说明,只有在GT与需要回归框位置比较接近时,才可近似认为上述线性变换成立。
说完原理,对应于Faster RCNN原文,positive anchor与ground truth之间的平移量  与尺度因子
与尺度因子  如下:
如下:
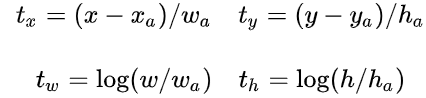
对于训练bouding box regression网络回归分支,输入是cnn feature Φ,监督信号是Anchor与GT的差距  ,即训练目标是:输入 Φ的情况下使网络输出与监督信号尽可能接近。那么当bouding box regression工作时,再输入Φ时,回归网络分支的输出就是每个Anchor的平移量和变换尺度,显然即可用来修正Anchor位置了。
,即训练目标是:输入 Φ的情况下使网络输出与监督信号尽可能接近。那么当bouding box regression工作时,再输入Φ时,回归网络分支的输出就是每个Anchor的平移量和变换尺度,显然即可用来修正Anchor位置了。
2.5 对proposals进行bounding box regression
在了解bounding box regression后,再回头来看RPN网络第二条线路,如图12。

图12 RPN中的bbox reg
先来看一看上图11中1x1卷积的caffe prototxt定义:
layer {
name: "rpn_bbox_pred"
type: "Convolution"
bottom: "rpn/output"
top: "rpn_bbox_pred"
convolution_param {
num_output: 36 # 4 * 9(anchors)
kernel_size: 1 pad: 0 stride: 1
}
}
可以看到其 num_output=36,即经过该卷积输出图像为WxHx36,在caffe blob存储为[1, 4x9, H, W],这里相当于feature maps每个点都有9个anchors,每个anchors又都有4个用于回归的 变换量。 回到图8,VGG输出 50*38*512 的特征,对应设置 50*38*k 个anchors,而RPN输出:
变换量。 回到图8,VGG输出 50*38*512 的特征,对应设置 50*38*k 个anchors,而RPN输出:
大小为50*38*2k 的positive/negative softmax分类特征矩阵;
大小为 50*38*4k 的regression坐标回归特征矩阵。
恰好满足RPN完成positive/negative分类+bounding box regression坐标回归。
2.6 Proposal Layer
Proposal Layer负责综合所有  变换量和positive anchors,计算出精准的proposal,送入后续RoI Pooling Layer。还是先来看看Proposal Layer的caffe prototxt定义:
变换量和positive anchors,计算出精准的proposal,送入后续RoI Pooling Layer。还是先来看看Proposal Layer的caffe prototxt定义:
layer {
name: 'proposal'
type: 'Python'
bottom: 'rpn_cls_prob_reshape'
bottom: 'rpn_bbox_pred'
bottom: 'im_info'
top: 'rois'
python_param {
module: 'rpn.proposal_layer'
layer: 'ProposalLayer'
param_str: "'feat_stride': 16"
}
}
Proposal Layer有3个输入:positive vs negative anchors分类器结果rpn_cls_prob_reshape,对应的bbox reg的  变换量rpn_bbox_pred,以及im_info;另外还有参数feat_stride=16,这和图4是对应的。 首先解释im_info。对于一副任意大小PxQ图像,传入Faster RCNN前首先reshape到固定MxN,im_info=[M, N, scale_factor]则保存了此次缩放的所有信息。然后经过Conv Layers,经过4次pooling变为WxH=(M/16)x(N/16)大小,其中feature_stride=16则保存了该信息,用于计算anchor偏移量。
变换量rpn_bbox_pred,以及im_info;另外还有参数feat_stride=16,这和图4是对应的。 首先解释im_info。对于一副任意大小PxQ图像,传入Faster RCNN前首先reshape到固定MxN,im_info=[M, N, scale_factor]则保存了此次缩放的所有信息。然后经过Conv Layers,经过4次pooling变为WxH=(M/16)x(N/16)大小,其中feature_stride=16则保存了该信息,用于计算anchor偏移量。
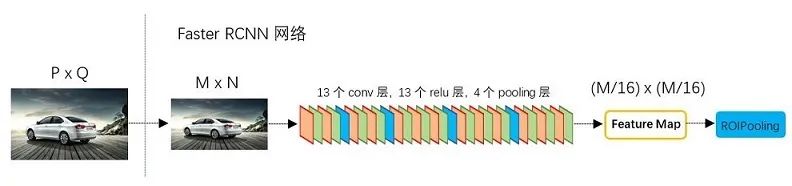
图13
Proposal Layer forward(caffe layer的前传函数)按照以下顺序依次处理:
生成anchors,利用对所有的anchors做bbox regression回归(这里的anchors生成和训练时完全一致) ;
;
按照输入的positive softmax scores由大到小排序anchors,提取前pre_nms_topN(e.g. 6000)个anchors,即提取修正位置后的positive anchors;
限定超出图像边界的positive anchors为图像边界,防止后续roi pooling时proposal超出图像边界(见文章底部QA部分图21);
剔除尺寸非常小的positive anchors;
对剩余的positive anchors进行NMS(nonmaximum suppression)
Proposal Layer有3个输入:positive和negative anchors分类器结果rpn_cls_prob_reshape,对应的bbox reg的(e.g. 300)结果作为proposal输出。
之后输出proposal=[x1, y1, x2, y2],注意,由于在第三步中将anchors映射回原图判断是否超出边界,所以这里输出的proposal是对应MxN输入图像尺度的,这点在后续网络中有用。另外我认为,严格意义上的检测应该到此就结束了,后续部分应该属于识别了。 RPN网络结构就介绍到这里,总结起来就是:
生成anchors -> softmax分类器提取positvie anchors -> bbox reg回归positive anchors -> Proposal Layer生成proposals
3 RoI pooling
而RoI Pooling层则负责收集proposal,并计算出proposal feature maps,送入后续网络。从图2中可以看到Rol pooling层有2个输入:
原始的feature maps
RPN输出的proposal boxes(大小各不相同)
3.1 为何需要RoI Pooling
先来看一个问题:对于传统的CNN(如AlexNet和VGG),当网络训练好后输入的图像尺寸必须是固定值,同时网络输出也是固定大小的vector or matrix。如果输入图像大小不定,这个问题就变得比较麻烦。有2种解决办法:
从图像中crop一部分传入网络;
将图像warp成需要的大小后传入网络。
两种办法的示意图如图14,可以看到无论采取那种办法都不好,要么crop后破坏了图像的完整结构,要么warp破坏了图像原始形状信息。 回忆RPN网络生成的proposals的方法:对positive anchors进行bounding box regression,那么这样获得的proposals也是大小形状各不相同,即也存在上述问题。所以Faster R-CNN中提出了RoI Pooling解决这个问题。不过RoI Pooling确实是从Spatial Pyramid Pooling发展而来,但是限于篇幅这里略去不讲,有兴趣的读者可以自行查阅相关论文。
3.2 RoI Pooling原理
分析之前先来看看RoI Pooling Layer的caffe prototxt的定义:
layer {
name: "roi_pool5"
type: "ROIPooling"
bottom: "conv5_3"
bottom: "rois"
top: "pool5"
roi_pooling_param {
pooled_w: 7
pooled_h: 7
spatial_scale: 0.0625 # 1/16
}
}
其中有新参数pooled_w和pooled_h,另外一个参数spatial_scale认真阅读的读者肯定已经知道知道用途。RoI Pooling layer forward过程:
由于proposal是对应MxN尺度的,所以首先使用spatial_scale参数将其映射回(M/16)x(N/16)大小的feature map尺度;
再将每个proposal对应的feature map区域水平分为pooled_w x pooled_h 的网格;
对网格的每一份都进行max pooling处理。
这样处理后,即使大小不同的proposal输出结果都是 pooled_w x pooled_h 固定大小,实现了固定长度输出。
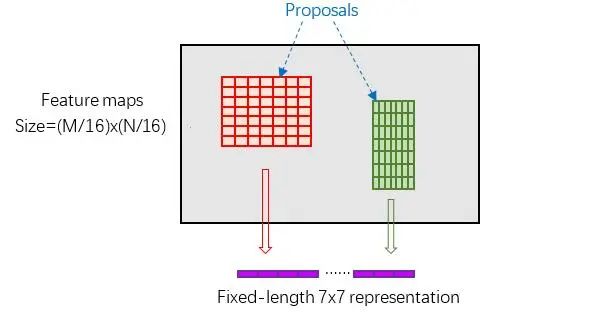
图15 proposal示意图
4 Classification
Classification部分利用已经获得的proposal feature maps,通过full connect层与softmax计算每个proposal具体属于那个类别(如人,车,电视等),输出cls_prob概率向量;同时再次利用bounding box regression获得每个proposal的位置偏移量bbox_pred,用于回归更加精确的目标检测框。Classification部分网络结构如图16。
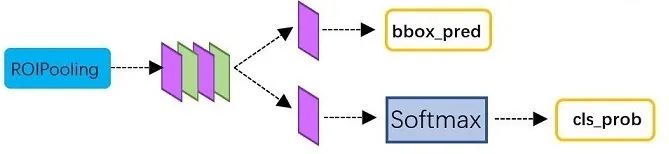
图16 Classification部分网络结构图
从RoI Pooling获取到7x7=49大小的proposal feature maps后,送入后续网络,可以看到做了如下2件事:
通过全连接和softmax对proposals进行分类,这实际上已经是识别的范畴了;
再次对proposals进行bounding box regression,获取更高精度的rect box。
这里来看看全连接层InnerProduct layers,简单的示意图如图17:
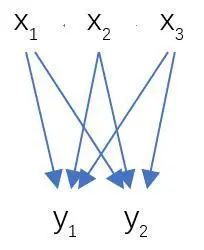
图17 全连接层示意图
其计算公式如下:

其中W和bias B都是预先训练好的,即大小是固定的,当然输入X和输出Y也就是固定大小。所以,这也就印证了之前Roi Pooling的必要性。到这里,我想其他内容已经很容易理解,不在赘述了。
5 Faster RCNN训练
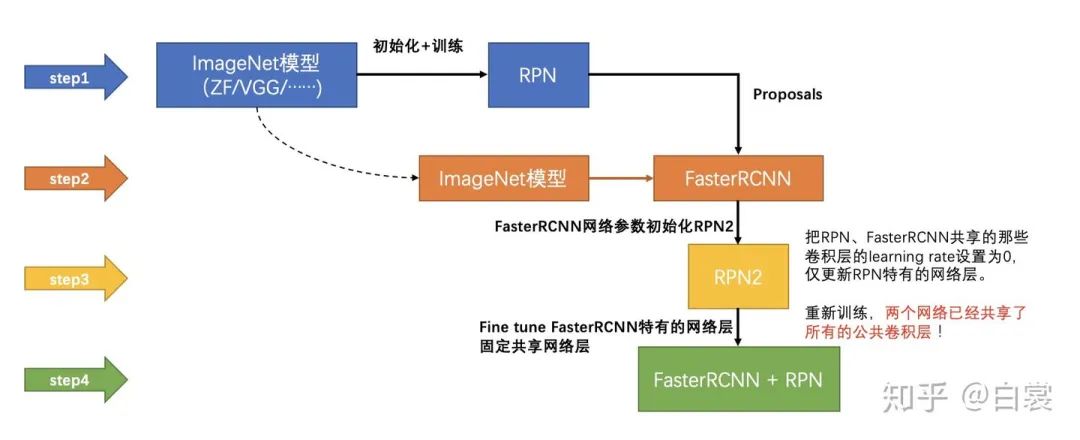
Faster R-CNN的训练,是在已经训练好的model(如VGG_CNN_M_1024,VGG,ZF)的基础上继续进行训练。实际中训练过程分为6个步骤:
在已经训练好的model上,训练RPN网络,对应stage1_rpn_train.pt
利用步骤1中训练好的RPN网络,收集proposals,对应rpn_test.pt
第一次训练Fast RCNN网络,对应stage1_fast_rcnn_train.pt
第二训练RPN网络,对应stage2_rpn_train.pt
再次利用步骤4中训练好的RPN网络,收集proposals,对应rpn_test.pt
第二次训练Fast RCNN网络,对应stage2_fast_rcnn_train.pt
可以看到训练过程类似于一种“迭代”的过程,不过只循环了2次。至于只循环了2次的原因是应为作者提到:"A similar alternating training can be run for more iterations, but we have observed negligible improvements",即循环更多次没有提升了。接下来本章以上述6个步骤讲解训练过程。 下面是一张训练过程流程图,应该更加清晰:
5.1 训练RPN网络
在该步骤中,首先读取RBG提供的预训练好的model(本文使用VGG),开始迭代训练。来看看stage1_rpn_train.pt网络结构,如图19。
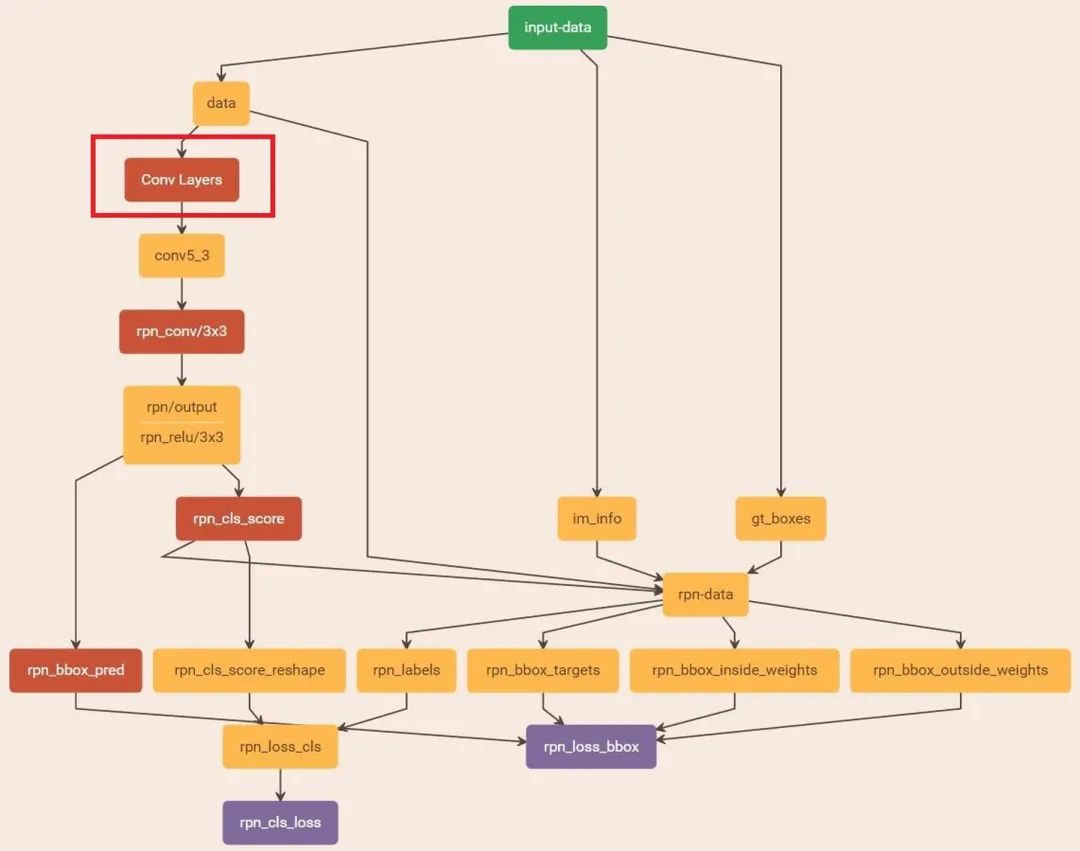
图19 stage1_rpn_train.pt(考虑图片大小,Conv Layers中所有的层都画在一起了,如红圈所示,后续图都如此处理)
与检测网络类似的是,依然使用Conv Layers提取feature maps。整个网络使用的Loss如下:

上述公式中 i 表示anchors index, 表示positive softmax probability,
表示positive softmax probability, 代表对应的GT predict概率(即当第i个anchor与GT间IoU>0.7,认为是该anchor是positive,
代表对应的GT predict概率(即当第i个anchor与GT间IoU>0.7,认为是该anchor是positive, ;反之IoU<0.3时,认为是该anchor是negative,
;反之IoU<0.3时,认为是该anchor是negative, ;至于那些0.3<0.7的anchor则不参与训练);t代表predict>
;至于那些0.3<0.7的anchor则不参与训练);t代表predict>
cls loss,即rpn_cls_loss层计算的softmax loss,用于分类anchors为positive与negative的网络训练;
reg loss,即rpn_loss_bbox层计算的soomth L1 loss,用于bounding box regression网络训练。注意在该loss中乘了 ,相当于只关心positive anchors的回归(其实在回归中也完全没必要去关心negative)。
由于在实际过程中, 和
和 差距过大,用参数λ平衡二者(如
差距过大,用参数λ平衡二者(如 ,
, 时设置
时设置  ),使总的网络Loss计算过程中能够均匀考虑2种Loss。这里比较重要是
),使总的网络Loss计算过程中能够均匀考虑2种Loss。这里比较重要是  使用的soomth L1 loss,计算公式如下:
使用的soomth L1 loss,计算公式如下:
了解数学原理后,反过来看图18:
在RPN训练阶段,rpn-data(python AnchorTargetLayer)层会按照和test阶段Proposal层完全一样的方式生成Anchors用于训练;
对于rpn_loss_cls,输入的rpn_cls_scors_reshape和rpn_labels分别对应 与
与  ,参数隐含在与的caffe blob的大小中;
,参数隐含在与的caffe blob的大小中;
对于rpn_loss_bbox,输入的rpn_bbox_pred和rpn_bbox_targets分别对应 t 与 t* ,rpn_bbox_inside_weigths对应 ,rpn_bbox_outside_weigths未用到(从smooth_L1_Loss layer代码中可以看到),而 同样隐含在caffe blob大小中。
同样隐含在caffe blob大小中。
这样,公式与代码就完全对应了。特别需要注意的是,在训练和检测阶段生成和存储anchors的顺序完全一样,这样训练结果才能被用于检测!
5.2 通过训练好的RPN网络收集proposals
在该步骤中,利用之前的RPN网络,获取proposal rois,同时获取positive softmax probability,如图20,然后将获取的信息保存在python pickle文件中。该网络本质上和检测中的RPN网络一样,没有什么区别。
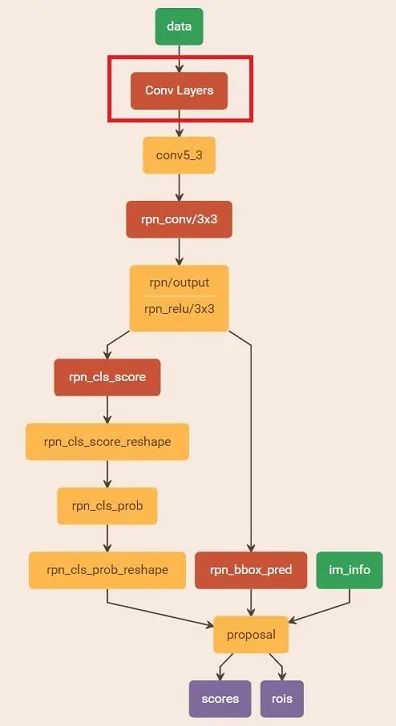
图20 rpn_test.pt
5.3 训练Faster RCNN网络
读取之前保存的pickle文件,获取proposals与positive probability。从data层输入网络。然后:
将提取的proposals作为rois传入网络,如图21蓝框;
计算bbox_inside_weights+bbox_outside_weights,作用与RPN一样,传入soomth_L1_loss layer,如图21绿框。
这样就可以训练最后的识别softmax与最终的bounding box regression了。
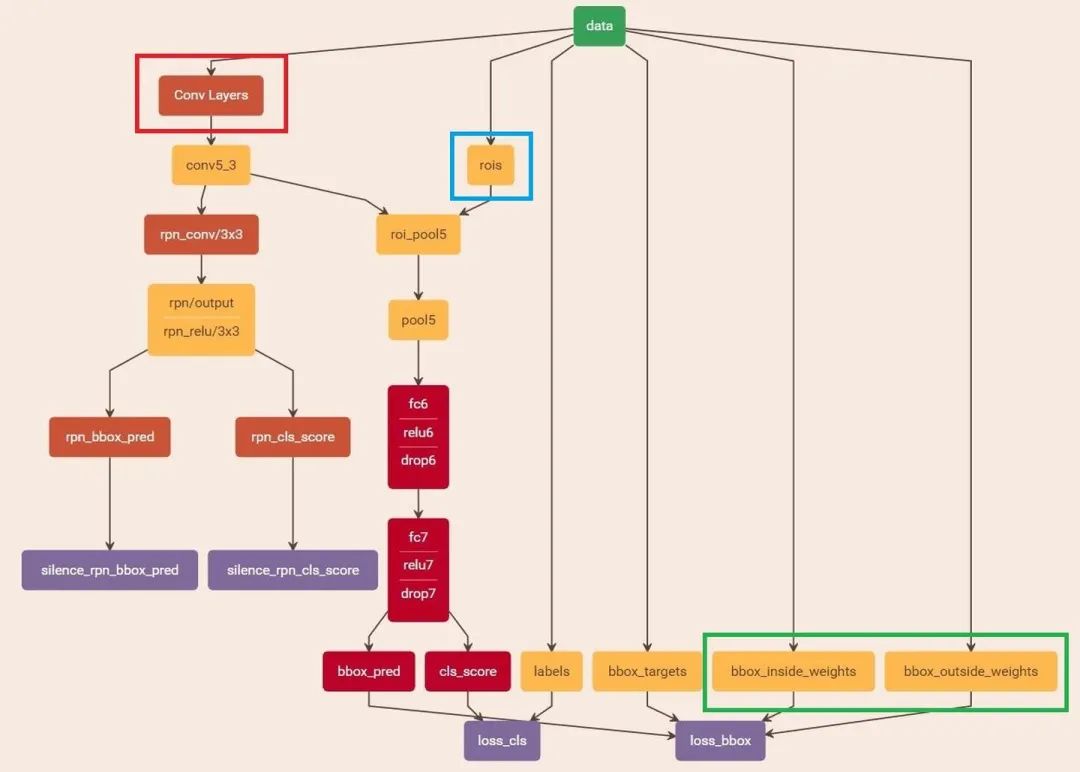
图21 stage1_fast_rcnn_train.pt
之后的stage2训练都是大同小异,不再赘述了。Faster R-CNN还有一种end-to-end的训练方式,可以一次完成train,有兴趣请自己看作者GitHub吧。 rbgirshick py-faster-rcn: github.com/rbgirshick/py-faster-rcnn
Q&A
此篇文章初次成文于2016年内部学习分享,再后来经多次修正和完善成为现在的样子。感谢大家一直以来的支持,现在总结常见疑问回答如下:
为什么Anchor坐标中有负数?
回顾anchor生成步骤:首先生成9个base anchor,然后通过坐标偏移在50*38 大小的 1/16下采样FeatureMap每个点都放上这9个base anchor,就形成了 50*38*k 个anhcors。至于这9个base anchor坐标是什么其实并不重要,不同代码实现也许不同。 显然这里面有一部分边缘anchors会超出图像边界,而真实中不会有超出图像的目标,所以会有clip anchor步骤。
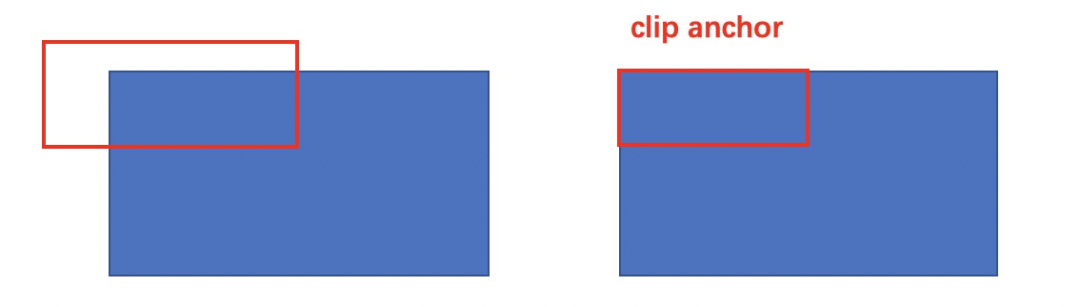
图21 clip anchor
Anchor到底与网络输出如何对应?
VGG输出 50*38*512 的特征,对应设置 50*38*k 个anchors,而RPN输出 50*38*2k 的分类特征矩阵和 50*38*4k 的坐标回归特征矩阵。
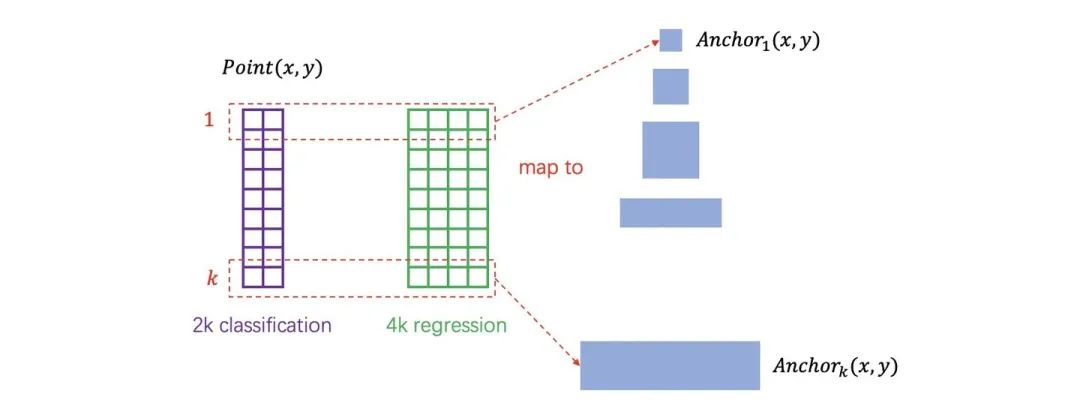
图22 anchor与网络输出如何对应方式
其实在实现过程中,每个点的 2k 个分类特征与 4k 回归特征,与 k 个anchor逐个对应即可,这实际是一种“人为设置的逻辑映射”。当然,也可以不这样设置,但是无论如何都需要保证在训练和测试过程中映射方式必须一致。
为何有ROI Pooling还要把输入图片resize到固定大小的MxN?
由于引入ROI Pooling,从原理上说Faster R-CNN确实能够检测任意大小的图片。但是由于在训练的时候需要使用大batch训练网络,而不同大小输入拼batch在实现的时候代码较为复杂,而且当时以Caffe为代表的第一代深度学习框架也不如Tensorflow和PyTorch灵活,所以作者选择了把输入图片resize到固定大小的800x600。这应该算是历史遗留问题。 另外很多问题,都是属于具体实现问题,真诚的建议读者阅读代码自行理解。
编辑:黄飞
-
神经网络结构搜索有什么优势?2019-09-11 4299
-
手绘网络结构图2019-10-25 3222
-
怎么运行Faster RCNN的tensorflow代码2020-06-15 1447
-
网络结构与IP分组交换技术2021-12-23 1256
-
RK3399 PRO npu支持faster RCNN做全图检测吗2022-04-15 5025
-
TD-SCDMA网络结构2009-06-19 2711
-
企业应找准智能电网切入点2010-02-25 511
-
HFC网络,HFC网络结构组成是什么?2010-03-20 10910
-
环形网络,环形网络结构是什么?2010-03-22 6757
-
[目标检测]Faster RCNN算法详解2017-12-06 1113
-
目标检测:Faster RCNN算法详解2021-01-13 6154
-
人工智能走进现实世界的切入点是2021-06-04 2831
-
都2023年了,Faster-RCNN还能用吗?2023-10-11 1503
-
财务数字化转型的切入点是什么?2023-11-01 945
-
如何优化PLC的网络结构?2023-12-23 1739
全部0条评论

快来发表一下你的评论吧 !
