

标准KUKA机器人带抓手V8.5操作步骤
机器人
描述
-抓手的关键输入输出点A577打开先导阀 E577先导阀打开,E578先导阀关闭-
范围-E/A 577-704
16个字节-
617-628吸盘-
579开始是夹具
M1 = E579& E580 + E15 BT1和BT2的检测以及E15空运转POT
M1 /M2 有件/没件(自己设置)
M31 = E583& !E584 & E585 & !E586 ~ 抓手 1 AUF 打开
M32 =!E583 & E584 & !E585 & E586~ 抓手 1 ZU 关闭
M33 = E587& !E588 & E589 & !E590 ~抓手2 AUF 打开
M34 =!E587 & E588 & !E589 & E590~抓手2 ZU 关闭
M35 = E591& !E592 & E593 & !E594 ~抓手3 AUF 打开
M36 =!E591 & E592 & !E593 & E594~抓手3 ZU 关闭
M37 = E595& !E596 & E597 & !E598 ~抓手4 AUF 打开
M38 =!E595 & E596 & !E597 & E598~抓手4 ZU 关闭
M63,M64-M68 吸盘
F54 〜选择无吹气的吸入回路
F523 〜G KYP01E反馈可用控制空气(常闭触点)
F524 〜G KYP01E反馈控制空气不可用(常开触点)
;FOLD F523= EIN -需要压力检测
F524 = AUS -不需要压力检测
-夹抓工作前检测是否需要有压力反馈
;FOLD WARTE BIS F523 & E577 + F524& !E578
E577 控制阀有压力
E578 控制阀没有压力
F53 关闭吸盘吸气后,不使用关闭吹气,-用于一体阀
F54 是否自动关闭反向吹气的真空阀
F55 第3个阀导的开启先导阀
F56 第2个阀导的开启先导阀
F57 用第1阀导的开启先导阀(一般没有实际意义)
F523-带先导阀-
F524-不带先导阀-
RETURN 1
2.F1-F16 对应控制夹抓1-16 F17-F22 对应控制吸盘1-6 3.打开夹抓
例:
7: F1 = EIN ~选择夹抓1
8: F2 = EIN ~选择夹抓2
9: F3 = EIN ~选择夹抓3
0: F4 = EIN ~选择夹抓4...
1: SPS MAKRO342 = !E579 &!E580 夹抓打开
2: SPS MAKRO340 = EIN 关闭阀控制
3: WARTE BIS M31 & M33& M35 & M37 检测夹抓打开位置
4.关闭夹抓
例:
3: F1 = EIN 选择夹抓1
4: F2 = EIN 选择夹抓2
5: F3 = EIN 选择夹抓3
6: F4 = EIN 选择夹抓4...
7: SPS MAKRO343 = EIN ~ 夹抓关闭
8: WARTE BIS M32 & M34& M36 & M38 & M1 检测夹抓关闭位置
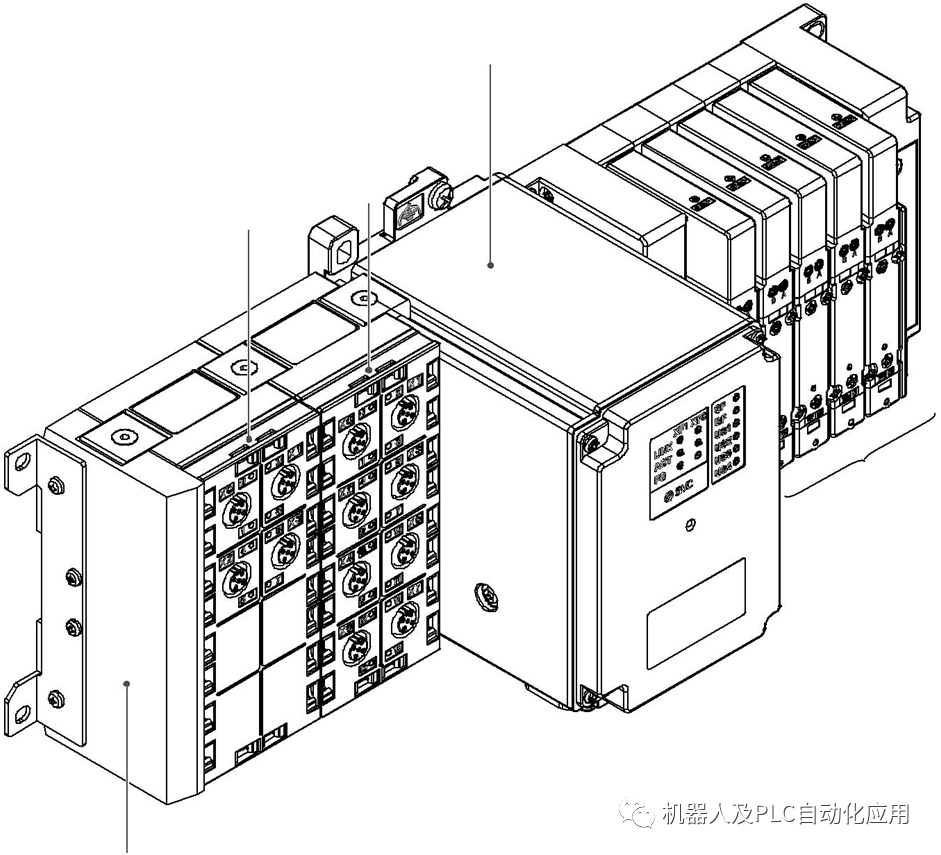
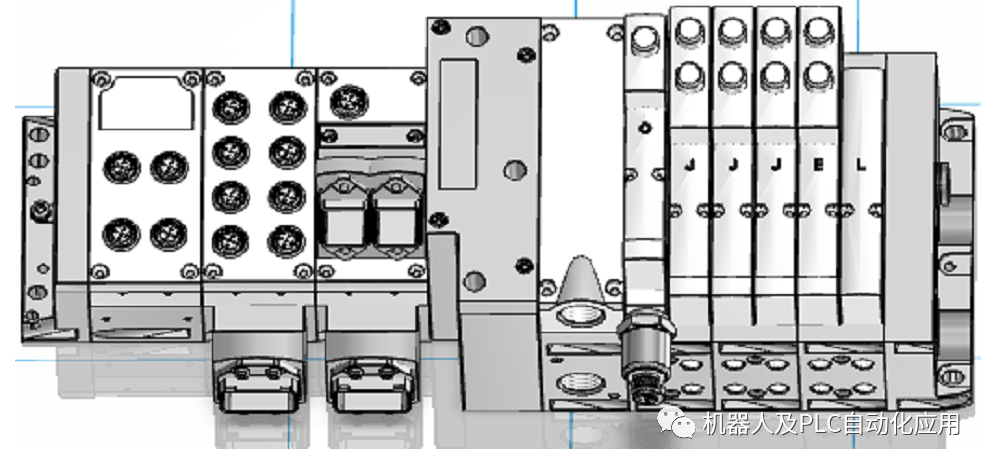
| 1 | SI 单元 | 进行现场总线通信和集装式电磁阀的 ON/OFF 输出。给输入输出模 | |||
| 块供给电源。 | |||||
| 2 | 数字输入模块 | 导入输入设备的传感器、开关输出。 | |||
| 3 | 数字输出模块 | 驱动电磁阀、指示灯、蜂鸣音等的输出设备。 | |||
| 4 | 端板 | SI 单元、以及输入输出模块用端板。 | |||
| 5 | 电磁阀 | 驱动空气设备 |
如果在机器人夹持器上安装了带有5/3通阀的手动夹持器,则在调用maKro342“夹持器打开/吸盘关闭”之后,必须在PSPS中设置“夹持组打开”的相关输出。这样可以确保手动张紧器保持其位置。相应的输出必须在装载位置复位。
从站区域中从“选项1”到“选项12”的未使用选项用于将机械手I / O镜像到更高级别的BMS。I/ O地址范围从129到224 输出阀1 先导阀 A577 O_V1_G1=577 ;激活抓持器MAKRO控制抓手 O_G_aktiv=121
IF $OUT[O_R_Hand] AND $FLAG[F_RSK_Gst] AND NOT$COULD_START_MOTION THEN 在A11手动时,F321顺序块在原位, $COULD_START_MOTION程序运行执行监控 机器人在手动执行使时, 顺序块在原位,程序中断,所以在手动时不执行程序驱动向前时,是不会有A277的. $OUT[O_V1_G1]=FALSE
$OUT[O_V2_G1]=FALSE $OUT[O_V3_G1]=FALSE …… IF $OUT[O_R_Auto] AND NOT $COULD_START_MOTION AND NOT $OUT[O_G_aktiv] THEN 在A12自动, $COULD_START_MOTION程序运行执行监控,没有A121 在没有抓手控制MAKRO时就不发出A121,没有A121,还是在自动状态时,执行程序被中断. $OUT[O_V1_G1]=FALSE
$OUT[O_V2_G1]=FALSE $OUT[O_V3_G1]=FALSE ENDIF
A 121 是由抓手里的MAKRO控制的. DEFFCTINT MAKRO342(ADV :IN) Makro Anfang A121 = EIN …… A121 = AUS
DEFFCTINT MAKRO343(ADV :IN) Makro Anfang A121 = EIN ……
A121 = AUS 如果你想让A577先导阀始终给着,在开安全门后,或者切换手/自动后,还能保持A577始终TRUE A577 = EIN A121 = EIN 在离开这段控制区后再关闭A121
编辑:黄飞
-
KUKA重型机器人2015-02-03 8325
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4425
-
KUKA机器人问题解答2019-07-15 2628
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12410
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10924
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8023
-
库卡机器人MGV电源模块维修2021-09-08 1886
-
KUKA机器人伺服驱动模块维修2021-09-17 1892
-
KUKA机器人KRC4操作说明书2015-12-23 2432
-
库卡(KUKA)机器人的操作手册免费下载2021-03-02 3995
-
机器人定位抓手的使用原则2022-11-23 3157
-
更改KUKA机器人系统时间的操作步骤2023-05-29 10925
-
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤2023-07-05 9894
-
焊接机器人的操作步骤2023-07-18 2929
-
浅析机器人定位抓手的使用原则2023-10-31 1582
全部0条评论

快来发表一下你的评论吧 !
